一種水下抗擾流裝置及水下作業方法、裝置
本發明涉及水下工程,尤其涉及一種水下抗擾流裝置及水下作業方法、裝置。
背景技術:
1、海底管道、海洋平臺、海底電纜和橋梁等基礎設施往往位于深水或高水壓環境中,人工作業具有很大的風險和局限性,需要使用水下機器人進行作業。由于水下環境復雜,水流的方向和速度不斷變化,容易導致水下機器人操作不穩定。現有技術利用流速儀采集流速數據,再通過調整舵機的輸出功率,使得水下機器人推進速度與擾流流速相匹配,以調整姿態。但是,推進器持續輸出動力導致能耗增加,續航時間縮短,并且姿態計算增加了水下機器人系統的復雜性,操作難度高,作業精準度低。
2、綜上,相關技術中存在的技術問題有待得到改善。
技術實現思路
1、本發明實施例提供了一種水下抗擾流裝置及水下作業方法、裝置,有效地提高了作業精準度和續航時間,降低了能耗。
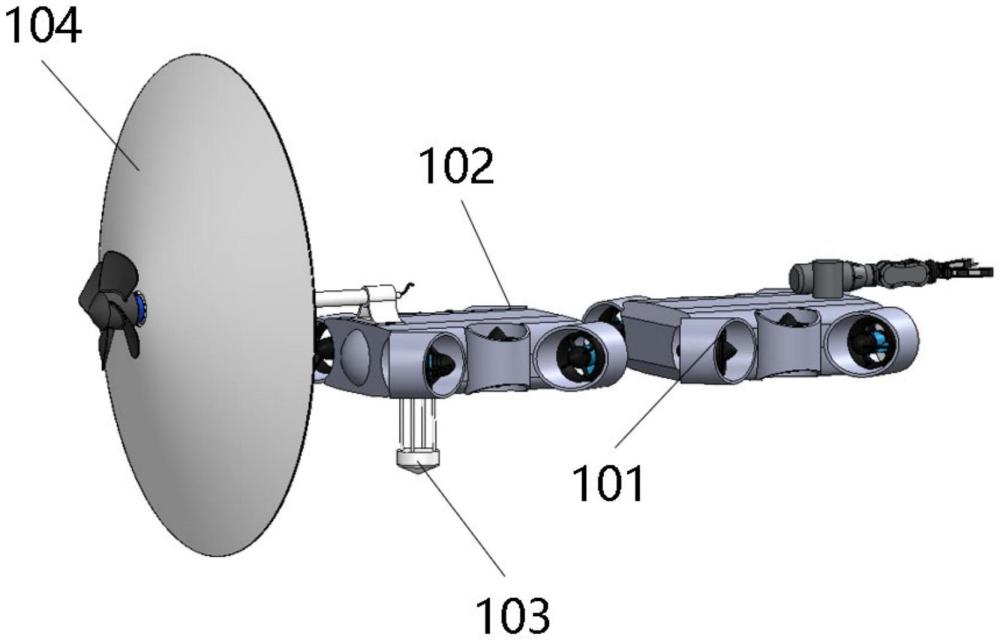
2、一方面,本發明實施例提供了一種水下抗擾流裝置,包括:
3、作業機器人模塊;
4、輔助機器人模塊,所述輔助機器人模塊與所述作業機器人模塊連接;
5、多普勒測速模塊,所述多普勒測速模塊與所述輔助機器人模塊連接,用于獲取水流速度;
6、阻流模塊,所述阻流模塊與所述輔助機器人模塊連接,用于根據所述水流速度,進行水下抗擾流處理。
7、在一些實施例中,所述阻流模塊包括:
8、螺旋槳,所述螺旋槳用于撥動水流;
9、電機組件,所述電機組件與所述螺旋槳連接,用于驅動所述螺旋槳進行旋轉;
10、擋圈,所述擋圈與所述電機組件連接,用于阻擋水流;
11、支撐桿,所述支撐桿與所述擋圈連接;
12、支架,所述支架與所述支撐桿連接。
13、在一些實施例中,所述螺旋槳的推進方向為逆水流方向。
14、在一些實施例中,所述電機組件為無刷直流電機。
15、本發明所具有的有益效果如下:
16、本發明實施例提供了一種水下抗擾流裝置包括作業機器人模塊、輔助機器人模塊、多普勒測速模塊和阻流模塊。其中,輔助機器人模塊與作業機器人模塊連接;多普勒測速模塊與輔助機器人模塊連接,用于獲取水流速度;阻流模塊與輔助機器人模塊連接,用于根據水流速度,進行水下抗擾流處理,從而實現了水下抗擾流裝置,提高了作業機器人的作業精準度和續航時間,降低了能耗。
17、另一方面,本發明實施例提供了一種應用于水下抗擾流裝置的水下作業方法,包括以下步驟:
18、獲取水流速度和水流方向;
19、根據所述水流方向,計算偏航角;
20、根據所述偏航角,利用超短基線對所述作業機器人模塊與所述輔助機器人模塊進行編隊處理,得到編隊位置信息;
21、根據所述水流速度,計算電機輸出功率;
22、根據所述編隊位置信息和所述電機輸出功率,進行水下抗擾流處理。
23、在一些實施例中,所述根據所述水流方向,計算偏航角,包括:
24、構建載體坐標系;
25、在所述載體坐標系中,根據所述水流方向,構建水流線;
26、在所述載體坐標系中,根據機器人相對位置信息,構建相對位置線;
27、根據所述水流線和所述相對位置線,計算所述偏航角。
28、在一些實施例中,所述根據所述偏航角,利用超短基線對所述作業機器人模塊與所述輔助機器人模塊進行編隊處理,得到編隊位置信息,包括:
29、獲取作業機器人狀態信息,所述作業機器人狀態信息包括距離信息、俯仰角信息、翻滾角信息、線速度信息或角速度信息;
30、利用最小均方誤差法對所述作業機器人狀態信息進行數據擬合,得到擬合數據;
31、根據作業機器人運動學和輔助機器人運動學,通過狀態估計和卡爾曼濾波對所述擬合數據進行噪聲過濾,得到目標狀態信息;
32、根據所述目標狀態信息和所述偏航角,進行編隊,得到所述編隊位置信息。
33、在一些實施例中,所述方法還包括:
34、進行流場仿真分析;
35、所述進行流場仿真分析,包括以下步驟:
36、設置仿真參數;
37、根據所述仿真參數和螺旋槳槳葉的形狀,進行模型仿真運算,得到電算結果。
38、另一方面,本發明實施例提供了一種水下作業裝置,包括:
39、第一模塊,用于獲取水流速度和水流方向;
40、第二模塊,用于根據所述水流方向,計算偏航角;
41、第三模塊,用于根據所述偏航角,利用超短基線對所述作業機器人模塊與所述輔助機器人模塊進行編隊處理,得到編隊位置信息;
42、第四模塊,用于根據所述水流速度,計算電機輸出功率;
43、第五模塊,用于根據所述編隊位置信息和所述電機輸出功率,進行水下抗擾流處理。
44、另一方面,本發明實施例提供了一種計算機裝置,包括:
45、至少一個處理器;
46、至少一個存儲器,用于存儲至少一個程序;
47、當所述至少一個程序被所述至少一個處理器執行,使得所述至少一個處理器實現所述的方法。
48、本發明所具有的有益效果如下:
49、本發明實施例首先獲取水流速度和水流方向,根據水流方向,計算偏航角,然后根據偏航角,利用超短基線對作業機器人模塊與輔助機器人模塊進行編隊處理,得到編隊位置信息,再根據水流速度,計算電機輸出功率,最后根據編隊位置信息和電機輸出功率,進行水下抗擾流處理,從而能夠通過控制輔助機器人位置和電機輸出功率實現水下抗擾流,提高了作業機器人的作業精準度和續航時間,降低了能耗。
50、本發明的其它特征和優點將在隨后的說明書中闡述,并且,部分地從說明書中變得顯而易見,或者通過實施本發明而了解。本發明的目的和其他優點可通過在說明書以及附圖中所特別指出的結構來實現和獲得。
技術特征:
1.一種水下抗擾流裝置,其特征在于,包括:
2.根據權利要求1所述的裝置,其特征在于,所述阻流模塊包括:
3.根據權利要求2所述的裝置,其特征在于,所述螺旋槳的推進方向為逆水流方向。
4.根據權利要求2所述的裝置,其特征在于,所述電機組件為無刷直流電機。
5.一種應用于權利要求1-4任一項所述的水下抗擾流裝置的水下作業方法,其特征在于,包括以下步驟:
6.根據權利要求5所述的方法,其特征在于,所述根據所述水流方向,計算偏航角,包括:
7.根據權利要求5所述的方法,其特征在于,所述根據所述偏航角,利用超短基線對所述作業機器人模塊與所述輔助機器人模塊進行編隊處理,得到編隊位置信息,包括:
8.根據權利要求5所述的方法,其特征在于,所述方法還包括:
9.一種水下作業裝置,其特征在于,包括:
10.一種計算機裝置,其特征在于,包括:
技術總結
本發明公開了一種水下抗擾流裝置及水下作業方法、裝置,水下抗擾流裝置包括:作業機器人模塊;輔助機器人模塊,輔助機器人模塊與作業機器人模塊連接;多普勒測速模塊,多普勒測速模塊與輔助機器人模塊連接,用于獲取水流速度;阻流模塊,阻流模塊與輔助機器人模塊連接,用于根據水流速度,進行水下抗擾流處理。阻流模塊包括:螺旋槳,螺旋槳用于撥動水流;電機組件,電機組件與螺旋槳連接,用于驅動螺旋槳進行旋轉;擋圈,擋圈與電機組件連接,用于阻擋水流;支撐桿,支撐桿與擋圈連接;支架,支架與支撐桿連接。本發明實現了水下抗擾流裝置,提高了作業精準度和續航時間,降低了能耗。本發明可廣泛應用于水下工程技術領域。
技術研發人員:陳炳聰,姚毅昆,劉愛榮,林華威,藍濤
受保護的技術使用者:廣州大學
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!