一種電力巡檢無人機及其方法與流程
本發明涉及電力巡檢,具體涉及一種電力巡檢無人機及其方法。
背景技術:
1、為保障電力系統的巡行,需要對高壓線、塔架及相關電路設備進行全天候的巡檢;電力巡檢無人機整體高效、安全、靈活,被廣泛投入到電力系統的巡檢作業中。
2、如中國專利cn116632717b就公開了一種電力巡檢用的無人機巡檢設備及巡檢方法,該設備通過多旋翼為巡檢主體提供升力,通過攝像機精確完成巡檢作業。
3、但是,在塔架之間一般僅存在高壓線;而塔架之間的具體較長,通過無人機沿高壓線飛行進行檢測時,需要使主體保持足夠的升力,因此需要消耗較大的能量;從而縮短了巡檢無人機的單次使用時間。
4、基于此,本發明設計了一種電力巡檢無人機及其方法以解決上述問題。
技術實現思路
1、針對現有技術所存在的上述缺點,本發明提供了一種電力巡檢無人機及其方法。
2、為實現以上目的,本發明通過以下技術方案予以實現:
3、一種電力巡檢無人機,包括無人機主體、調節式動力系統、懸掛機構和清理模塊;
4、所述無人機主體的內部固定安裝有控制器;無人機主體上固定安裝有云臺,云臺上安裝有智能攝像頭;
5、無人機主體上安裝有調節式動力系統;所述調節式動力系統包括同步調節模塊、轉動臂和調節式動力組件,無人機主體上呈圓周陣列設置有四組轉動臂,轉動臂的一端轉動安裝在無人機主體上;轉動臂的另一端安裝有調節式動力組件;無人機主體上安裝有用于調節轉動臂的同步調節模塊;
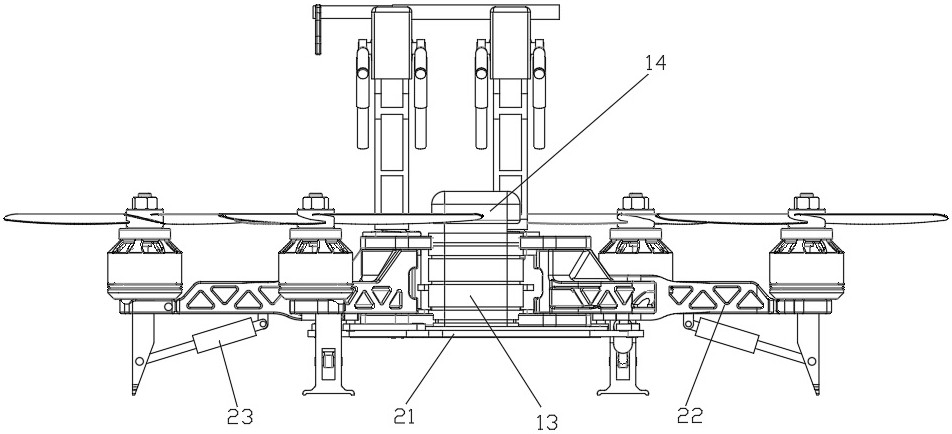
6、所述無人機主體的上側安裝有兩組懸掛機構;兩組懸掛機構之間安裝有用于清理高空電纜的清理模塊。
7、更進一步的,所述同步調節模塊包括調節電機、齒輪、不完全齒圈、轉動架和調節桿,調節電機固定安裝在無人機主體上,調節電機的輸出端穿過無人機主體與齒輪固定連接;轉動架轉動安裝在無人機主體的下側;轉動架上固定安裝有不完全齒圈,不完全齒圈與齒輪嚙合連接;調節桿設置有多個,調節桿的一端與轉動架轉動連接,調節桿的另一端與轉動臂轉動連接。
8、更進一步的,所述調節式動力組件包括轉動安裝塊、支腿、電動推桿和動力模塊,轉動安裝塊轉動安裝在轉動臂的外端,轉動安裝塊的下側固定安裝有支腿,轉動安裝塊的上側安裝有動力模塊;電動推桿轉動安裝在轉動臂上,電動推桿的輸出端與支腿的中部轉動連接。
9、更進一步的,動力模塊包括槳葉和驅動電機,轉動安裝塊上轉動安裝有槳葉;驅動電機固定安裝在轉動安裝塊上;驅動電機的輸出端與槳葉固定連接。
10、更進一步的,所述懸掛機構包括懸掛組件和阻擋模塊,懸掛組件安裝在無人機主體上;阻擋模塊安裝在懸掛組件上。
11、更進一步的,懸掛組件包括固定架、固定桿、擋板、浮動彈簧和懸掛模塊,固定架下側對稱固定安裝有固定桿;兩個固定桿穿過無人機主體的上側后與擋板的兩端固定連接;浮動彈簧套設在固定桿外,浮動彈簧的一端與無人機主體固定連接,浮動彈簧的另一端與固定架固定連接;懸掛模塊安裝在固定架上側。
12、更進一步的,懸掛模塊包括支撐架、滑塊和轉動滾輪,固定架上固定安裝有支撐架;支撐架下側對稱開設有滑槽;滑槽內限位滑動安裝有滑塊;轉動滾輪的兩端分別與兩個滑塊轉動連接。
13、更進一步的,所述阻擋模塊包括第一擋輪、l型轉動架和第二擋輪,支撐架的中部對稱轉動安裝有l型轉動架;l型轉動架的一端轉動安裝有第一擋輪;l型轉動架的另一端轉動安裝有第二擋輪。
14、更進一步的,所述清理模塊包括固定套筒、滑動套筒、振動彈簧和適形刮板,固定架上固定安裝有固定套筒,滑動套筒與固定套筒限位滑動;振動彈簧的一端與固定套筒固定連接,振動彈簧的另一端與滑動套筒固定連接;滑動套筒的外端固定安裝有適形刮板。
15、為了更好地實現本發明的目的,本發明還提供了一種電力巡檢無人機的使用方法,包括以下步驟:
16、步驟一:根據實際使用狀況,操控調節電機帶動齒輪轉動,齒輪帶動不完全齒圈轉動,從而帶動轉動架轉動,轉動架通過調節桿帶動多個轉動臂相對移動;從而調整轉動臂的相對位置,調整轉動臂整體占用空間;
17、步驟二:在高壓線的塔架附近巡檢時,驅動電機帶動槳葉轉動,從而提供升力,并通過轉動安裝塊、轉動臂帶動無人機主體飛行;通過無人機主體上的智能攝像頭對塔架及塔架上的高壓線及電力設備的狀況進行記錄,并通過控制器進行判斷;如發現異常狀況,則將相應的設備信息通過控制器遠程發送到遠程控制終端;
18、步驟三:在塔架之間移動時,通過控制器控制驅動電機和槳葉,使無人機主體飛行至高壓線的附近,此時高壓線位于第一擋輪的側邊;操控無人機主體繼續向高壓線靠近,直至高壓線通過第一擋輪推動l型轉動架轉動,使高壓線位于轉動滾輪的正下側;此時減少驅動電機和槳葉提供的升力,使無人機主體逐漸向下移動;在此過程中高壓線支撐轉動滾輪;使轉動滾輪兩側的滑塊相對滑槽向上移動;且高壓線通過第一擋輪推動l型轉動架轉動,使第二擋輪轉動到高壓線側邊下方,實現對高壓線的阻擋;直至高壓線完全卡入轉動滾輪中部;在此過程中支撐架上的固定套筒、滑動套筒、振動彈簧和適形刮板移動,直至適形刮板卡在高壓線上;
19、步驟四:通過控制器操縱電動推桿帶動轉動安裝塊轉動,調整轉動安裝塊上的槳葉的姿態,使槳葉的驅動力沿高壓線方向;通過驅動電機帶動槳葉轉動,從而提供沿高壓線移動的動力;轉動滾輪與高壓線滾動接觸;從而通過滑塊、滑槽、支撐架、固定架和固定桿帶動無人機主體沿高壓線移動;
20、步驟五:適形刮板與高壓線貼合滑動;通過適形刮板對高壓線上的灰塵進行清理;如高壓線上存在鳥糞等固體物;固體物阻擋適形刮板;適形刮板帶動滑動套筒相對固定套筒進行相對移動;振動彈簧拉伸;直至振動彈簧的拉力足以帶動滑動套筒和適形刮板掛掉固體阻擋物。
21、本發明相較于現有技術,其有益效果為:1、在高壓線的塔架附近巡檢時,調節式動力組件在控制器的控制下,通過轉動臂帶動無人機主體沿塔架周圍飛行;通過無人機主體上的智能攝像頭對塔架及塔架上的高壓線及電力設備的狀況進行記錄,并通過控制器進行判斷;如發現異常狀況,則將相應的設備信息通過控制器遠程發送到遠程控制終端;無人機主體在塔架之間移動時,此時只需要觀測高壓線的狀況;因此通過控制器控制調節式動力組件,使無人機主體飛行至高壓線的附近;并通過懸掛機構使無人機主體懸掛在高壓線下側;通過懸掛機構對無人機主體進行支撐,從而可減少調節式動力組件為無人機主體提供的升力;
22、2、通過控制器操縱調節式動力組件調整調節式動力組件的姿態,使調節式動力組件的驅動力沿高壓線方向,通過調節式動力組件帶動無人機主體在高壓線下滑動;并通過智能攝像頭記錄沿路高壓線的狀況;在此過程中,通過清理模塊對高壓線上的灰塵及鳥糞等進行清理;在對高壓線架之間的高壓線進行檢測時,使無人機主體穩定,同時高壓線通過懸掛機構支撐無人機主體,減少調節式動力組件提供升力所需的能耗;有效延長無人機主體的單次使用時間;可通過同步調節模塊調整轉動臂之間的相對位置,從而調整整體占用的空間;使本發明得以應用在多種場景。
- 還沒有人留言評論。精彩留言會獲得點贊!