一種噴管式小衛星柔順捕獲工具
本發明屬于衛星捕獲,尤其涉及一種噴管式小衛星柔順捕獲工具。
背景技術:
1、21世紀太空探索進入新階段,越來越多的衛星被發射到太空中。失效衛星滯留在太空中或將造成資源浪費、經濟損失、geo資源緊張與空間交通安全隱患,在此背景下,衛星捕獲技術的研究迫在眉睫。
2、帕多瓦大學提出了柔性拉索式電磁捕獲技術的概念,并設計了felds系統及其對接試驗。對接過程主要分為發射拉索、軟對接、回收拉索和硬對接4個階段。這套機構的電磁對接主要體現在探頭接收系統捕獲對接球上,其對接平臺采用分層結構,嵌入電磁鐵產生電磁力,用來捕獲磁鐵制成的對接球。太空能源稀缺,供能難度大,而電磁捕獲作為一項高耗能技術,實際操作也存在一定局限性。
3、esa自2001年提出用飛網抓捕地球靜止軌道廢棄衛星的自主地球靜止軌道回收項目。esa計劃利用roger系統開展以下兩方面研究:利用roger飛網抓捕機構清除地球同步軌道上的失效衛星,并轉移到墳墓軌道;利用roger繩系飛爪抓捕未進入正常軌道的地球同步軌道衛星,并將其送入預定工作軌道。飛爪或飛網捕獲小衛星自由度大,實施條件靈活,應用范圍較廣;但網布尺寸太大,不便于太空布局,給操作增加了額外的難度。
4、國內外學者模仿象鼻、章魚觸角等提出了多種不同構型的連續體機器人。festo公司研制了一種仿象鼻氣動連續體機器人,該機器人由三個模塊組成,每個模塊包含三個獨立波紋狀氣腔,分別對不同氣腔通氣可實現機器人的柔順運動,與機器人前端部的氣動抓持機構相配合可以完成對不同物體的抓捕。
5、中國科學技術大學基于hpn(honeycomb?pneumatic?network)結構提出了一種新穎的蜂窩狀氣動連續體機器人,該機器人的每個氣腔都呈現六邊形構型,通過對氣腔的布置可以實現機器人在兩個面內的彎曲動作,實現對裝滿水的玻璃杯的抓取操作。
6、仿生抓捕手為柔性裝置,具有較大的折疊比,適宜用在對操作空間有苛刻限制的場合。但由于其材料過于柔性,也存在質量的目標和連接剛度低的缺點。
技術實現思路
1、本發明的目的是提供一種噴管式小衛星柔順捕獲工具,以解決現有衛星捕獲裝置存在的問題。本發明所采用的技術方案如下:
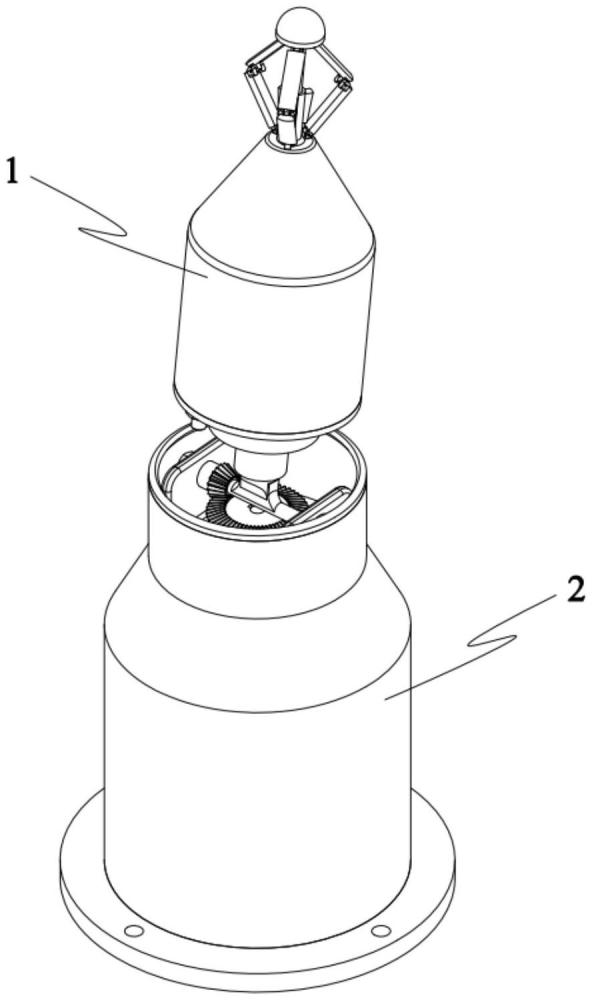
2、一種噴管式小衛星柔順捕獲工具,包括捕獲組件,捕獲組件包括前端外殼、捕獲電機、滾珠絲杠組件、傘桿和捕獲臂,捕獲電機固定在前端外殼內,前端外殼的前端呈錐形,所述滾珠絲杠組件包括相配合的螺桿和絲套,螺桿的后端與捕獲電機的輸出端相連,絲套與前端外殼滑動配合,傘桿的前端設有球頭結構,傘桿的后端探入前端外殼內,并與絲套相連,傘桿的外周設有若干捕獲臂,捕獲臂包括前桿和后桿,前桿的前端與球頭結構鉸接,后桿的后端與前端外殼鉸接,前桿的后端與后桿的前端鉸接相連,并構成捕獲臂的中部向外凸起,捕獲電機驅動絲套向前滑動時,傘桿前伸帶動若干捕獲臂的中部朝向傘桿收攏,捕獲電機驅動絲套向后滑動時,傘桿后縮帶動若干捕獲臂的中部背離傘桿撐開。
3、進一步的,前端外殼的前端設有限位套,傘桿由限位套探入前端外殼,限位套的外周設有若干限位凸塊,捕獲臂撐開時,球頭結構與限位套前后相抵限位,捕獲臂收攏時,若干后桿的內側與若干限位凸塊的外側一一對應相抵限位。
4、進一步的,前端外殼的前部設有定位套筒,所述定位套筒與前端外殼通過若干肋筋同軸相連,所述定位套筒上沿軸向開設有兩個滑槽,螺套的外周設有兩個滑動塊,兩個滑動塊分別與兩個滑槽一一對應滑動配合。
5、進一步的,還包括旋轉驅動組件,旋轉驅動組件包括后端外殼、套驅動電機、軸驅動電機、前齒輪、后齒輪、傘齒輪、錐齒輪和外旋轉構件,外旋轉構件包括前后連接的支架部和套筒部,套筒部與后端外殼轉動配合,套筒部的后端套接有前齒輪,內旋轉軸貫穿套筒部,內旋轉軸與套筒部轉動配合,內旋轉軸的后端套接有后齒輪相連,內旋轉軸的前端套接有傘齒輪,傳動軸轉動設置在支架部上,傳動軸上套接有錐齒輪,錐齒輪與傘齒輪嚙合,傳動軸的中部設有向前延伸的連接柱頭,套驅動電機的輸出端通過聯軸器與第一主動齒輪相連,第一主動齒輪與前齒輪嚙合,軸驅動電機的輸出端與第二主動齒輪相連,第二主動齒輪與后齒輪嚙合,前端外殼與連接柱頭相連。
6、進一步的,套驅動電機依次通過電機架和墊塊固定在后端外殼上。
7、進一步的,軸驅動電機依次通過電機架和墊塊固定在后端外殼上。
8、進一步的,內旋轉軸與套筒部通過軸承轉動配合,套筒部與后端外殼通過軸承轉動配合。
9、進一步的,傳動軸通過軸承轉動設置在支架部上。
10、進一步的,圓螺母與套筒部的下端相連,圓螺母的上端面與前齒輪的下端面相抵,前齒輪的上端面與套筒部的軸肩相抵。
11、進一步的,還包括第一主控芯片、第一驅動芯片、第二主控芯片、第二驅動芯片、sw1開關、sw2開關、sw3開關、第一電池和第二電池,第一主控芯片和第二主控芯片均為stc89c52rc-40i-lqfp-44型芯片,第一驅動芯片和第二驅動芯片均為tb6612fng芯片,sw1開關、sw2開關和sw3開關均為船型三擋開關;
12、套驅動電機的正負極分別與第一驅動芯片的1引腳和5引腳對應電連接,軸驅動電機的正負極分別與第一驅動芯片的8引腳和12引腳對應電連接,第一電池的正極分別與第一驅動芯片的20引腳和第一主控芯片的38引腳電連接,第一驅動芯片的18引腳和第一主控芯片的16引腳與接地電極電連接,第一驅動芯片的22引腳和第一主控芯片的22引腳電連接,第一驅動芯片的21引腳和第一主控芯片的21引腳電連接,第一驅動芯片的17引腳和第一主控芯片的43引腳電連接,第一驅動芯片的16引腳和第一主控芯片的44引腳電連接;sw1開關的靜觸點與第一主控芯片的24引腳電連接,sw1開關的兩個動觸點分別與第一主控芯片的23引腳和25引腳電連接,sw2開關的靜觸點與第一主控芯片的2引腳電連接,sw1開關的兩個動觸點分別與第一主控芯片的1引腳和3引腳電連接;
13、捕獲電機的正負極分別與第二驅動芯片的1引腳和5引腳對應電連接,第二電池的正極分別與第二驅動芯片的20引腳和第二主控芯片的38引腳電連接,第二驅動芯片的18引腳和第二主控芯片的16引腳與接地電極電連接,第二驅動芯片的22引腳和第二主控芯片的22引腳電連接,第二驅動芯片的21引腳和第二主控芯片的21引腳電連接;sw3開關的靜觸點與第二主控芯片的24引腳電連接,sw3開關的兩個動觸點分別與第二主控芯片的23引腳和25引腳電連接。
14、與現有技術相比,本發明的有益效果在于:
15、1.容差控制方面,運用傘齒輪控制連接柱頭,使捕獲組件可以有10°左右的橫向位移。
16、2.前端安裝雨滴形的球頭結構,球頭結構為耐摩擦材料,起到碰撞緩沖作用。
17、3.捕獲電機通過滾珠絲杠實現傘桿的伸縮,同時運用減速器連接捕獲電機和螺桿,可實現一定時間內的抓捕。衛星發生故障,主要原因是發動機燃料耗盡,功能補充方面,捕獲組件作為橋梁連接衛星,后端的旋轉驅動組件連接服務衛星或機械臂,更可連接燃料推進器,為燃料耗盡的衛星提供延壽服務。此外,本發明工具還具備智能化控制系統,能實現對電機的自動化電控調整。
- 還沒有人留言評論。精彩留言會獲得點贊!