基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機的制作方法
本發明涉及列車檢修領域,尤其涉及一種基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機。
背景技術:
1、相關技術中,更換動車組故障轉向架的方式有兩種,一種是利用檢修庫內既有架車機對整列動車組進行架車作業,再對故障轉向架進行替換。這種為單個轉向架的換裝而對整列動車組進行架車作業,效率低下,作業時間長,且耗費大量人工和機器成本。另一種是通過在檢修庫設置轉向架更換設備,但該設備一般通過將龍門式架車機固定在檢修軌道兩側,僅可實現對該股道車輛轉向架的換裝,且當該股道處于轉向架換裝作業時,該股到其他臺位及相鄰股道無法作業,此外該裝置基礎龐大且結構尺寸較大,占用軌道兩側的作業空間且制造成本較高。
2、現有技術中的架車機不便于對列車進行檢修,另外,現有技術中的架車機無法確保在升降過程中的安全性。
技術實現思路
1、本發明提供了一種基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機,可以提供較大的檢修空間以及確保檢修過程中的安全性,包括:
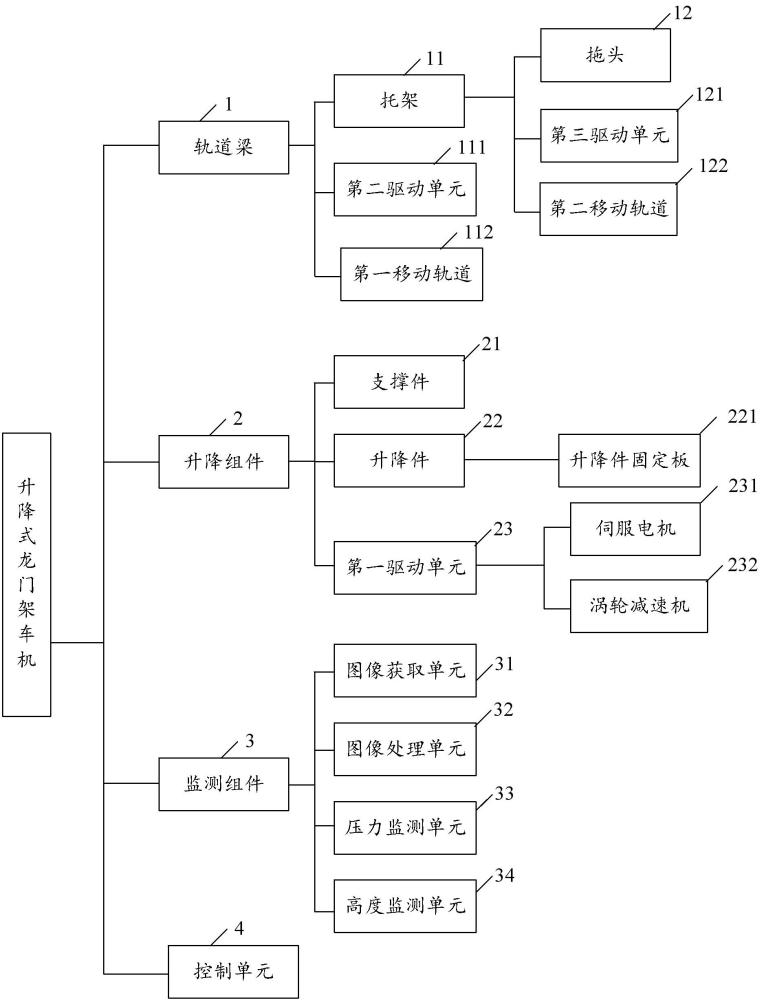
2、平行設置的兩個軌道梁,所述軌道梁上設置有托架,所述托架上設置有拖頭,所述托架和拖頭用于承載被抬升物體;
3、升降組件,包括支撐件、升降件和第一驅動單元;所述支撐件和所述升降件用于支撐軌道梁,所述第一支撐件和所述升降件傳動連接,所述第一驅動單元用于驅動支撐件和升降件產生相對移動,以帶動軌道梁進行升降;所述軌道梁的兩端均設置有升降組件;
4、監測組件,用于監測軌道梁的傾斜度;
5、控制單元,用于接收監測組件監測到的軌道梁的傾斜度,在所述軌道梁的傾斜度超出角度閾值時,調整多個升降組件的升降速度,使所述軌道梁保持水平。
6、可選地,所述軌道梁的側面開設有第一移動軌道,所述托架可在第二驅動單元的驅動下沿所述第一移動軌道進行移動。
7、可選地,所述托架上設置有第三驅動單元和第二移動軌道,所述第三驅動單元可驅動拖頭沿第二移動軌道進行移動,以調控拖頭與被抬升物體之間的間距。
8、可選地,所述升降件為絲杠,所述第一驅動單元固定在支撐件上,所述支撐件上設置有絲杠定位孔,所述升降件的一端固定在地面上,所述升降件的另一端穿過所述絲杠定位孔后與第一驅動單元傳動連接。
9、可選地,所述第一驅動單元包括伺服電機和渦輪減速機,所述伺服電機用于為所述渦輪減速機提供轉矩輸入,所述渦輪減速機用于調整所述伺服電機輸入的轉矩的方向和大小,并為所述升降件提供轉矩輸出,以帶動所述升降件進行轉動,所述升降件通過轉動以帶動所述支撐件進行升降。
10、可選地,所述監測組件包括圖像獲取單元和圖像處理單元,所述圖像獲取單元用于獲取軌道梁在升降過程中的圖像,所述圖像處理單元用于根據所述圖像獲取單元獲取到的圖像確定軌道梁的傾斜度。
11、可選地,所述圖像處理單元內設有圖像處理算法,所述圖像處理單元通過獲取軌道梁圖像中軌道梁兩端的圖像坐標,根據圖像坐標確定所述軌道梁的傾斜度。
12、可選地,所述監測組件還包括壓力監測單元和高度監測單元,所述壓力監測單元用于監測所述拖頭承載的壓力大小,在所述拖頭承載的壓力大小達到警戒閾值時,發出警報信號,并關閉升降組件;所述高度監測單元用于監測軌道梁的當前高度。
13、可選地,控制單元在所述軌道梁的傾斜度不滿足要求時,調整多個升降組件的升降速度,使所述軌道梁保持水平,包括:
14、所述控制單元根據所述軌道梁的傾斜度,確定所述軌道梁兩端的高度差;
15、所述控制單元確定軌道梁的當前高度;
16、根據升降組件當前的升降速度和軌道梁的當前高度,確定達到預設高度所需的剩余升降時間;
17、以所述剩余升降時間和所述高度差,確定軌道梁高度較低的一側的升降組件的升降速度。
18、可選地,所述角度閾值的取值范圍為0~1°。
19、本公開實施例提供的技術方案帶來的有益效果是:
20、在本公開實施例中,提供了一種基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機,該基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機包括用于承載列車的軌道梁、托架和拖頭,用于實現軌道梁升高和降低的多個升降組件,用于監控軌道梁水平度的監測組件、以及控制移動組件的控制單元。
21、通過在軌道梁兩端設置升降組件,以及使用托架和拖頭承載列車,可以為列車提供更大的檢修空間。通過監測組件和控制單元實現軌道梁的平穩升降,確保列車升降過程中的安全性。
技術特征:
1.一種基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機,其特征在于,包括:
2.根據權利要求1所述的基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機,其特征在于,所述軌道梁的側面開設有第一移動軌道,所述托架可在第二驅動單元的驅動下沿所述第一移動軌道進行移動。
3.根據權利要求1所述的基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機,其特征在于,所述托架上設置有第三驅動單元和第二移動軌道,所述第三驅動單元可驅動拖頭沿第二移動軌道進行移動,以調控拖頭與被抬升物體之間的間距。
4.根據權利要求1所述的基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機,其特征在于,所述升降件為絲杠,所述第一驅動單元固定在支撐件上,所述支撐件上設置有絲杠定位孔,所述升降件的一端固定在地面上,所述升降件的另一端穿過所述絲杠定位孔后與第一驅動單元傳動連接。
5.根據權利要求4所述的基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機,其特征在于,所述第一驅動單元包括伺服電機和渦輪減速機,所述伺服電機用于為所述渦輪減速機提供轉矩輸入,所述渦輪減速機用于調整所述伺服電機輸入的轉矩的方向和大小,并為所述升降件提供轉矩輸出,以帶動所述升降件進行轉動,所述升降件通過轉動以帶動所述支撐件進行升降。
6.根據權利要求1所述的基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機,其特征在于,所述監測組件包括圖像獲取單元和圖像處理單元,所述圖像獲取單元用于獲取軌道梁在升降過程中的圖像,所述圖像處理單元用于根據所述圖像獲取單元獲取到的圖像確定軌道梁的傾斜度。
7.根據權利要求6所述的基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機,其特征在于,所述圖像處理單元內設有圖像處理算法,所述圖像處理單元通過獲取軌道梁圖像中軌道梁兩端的圖像坐標,根據圖像坐標確定所述軌道梁的傾斜度。
8.根據權利要求6所述的基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機,其特征在于,所述監測組件還包括壓力監測單元和高度監測單元,所述壓力監測單元用于監測所述拖頭承載的壓力大小,在所述拖頭承載的壓力大小達到警戒閾值時,發出警報信號,并關閉升降組件;所述高度監測單元用于監測軌道梁的當前高度。
9.根據權利要求8所述的基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機,其特征在于,控制單元在所述軌道梁的傾斜度不滿足要求時,調整多個升降組件的升降速度,使所述軌道梁保持水平,包括:
10.根據權利要求1所述的基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機,其特征在于,所述角度閾值的取值范圍為0~1°。
技術總結
本發明提供了一種基于絲杠螺母傳動的全地下的轉向架智能換裝系統的升降式龍門架車機,包括:平行設置的兩個軌道梁,所述軌道梁上設置有托架,所述托架上設置有拖頭,所述托架和拖頭用于承載被抬升物體;升降組件,包括支撐件、升降件和第一驅動單元;所述支撐件和所述升降件用于支撐軌道梁,所述第一支撐件和所述升降件傳動連接,所述第一驅動單元用于驅動支撐件和升降件產生相對移動,以帶動軌道梁進行升降;所述軌道梁的兩端均設置有升降組件;監測組件,用于監測軌道梁的傾斜度;控制單元,用于接收監測組件監測到的軌道梁的傾斜度,在所述軌道梁的傾斜度超出角度閾值時,調整多個升降組件的升降速度,使所述軌道梁保持水平。
技術研發人員:劉高坤,葛曉,周明濤,張鵬,陳哲,張強,董韜,邱紹峰,楊輝,馮帥,葛鈺,曾思奧,周家盛
受保護的技術使用者:中鐵第四勘察設計院集團有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!