一種鈣鈦礦基板上料系統(tǒng)的制作方法
本技術(shù)涉及鈣鈦礦光伏組件制造,具體涉及一種鈣鈦礦基板上料系統(tǒng)。
背景技術(shù):
1、隨著鈣鈦礦光伏組件技術(shù)的發(fā)展,以鈣鈦礦光伏為代表的bipv在建筑領(lǐng)域使用不斷增多。其獨特的產(chǎn)品優(yōu)勢促使各大組件廠開始擴大鈣鈦礦組件的研發(fā)和批量生產(chǎn)。鈣鈦礦光伏組件的自動化生產(chǎn)線,包括上料、敷膜、排版、串焊、層壓、包裝等工序。由于鈣鈦礦組件基板較厚重,上料過程中的上片難以實現(xiàn)自動化,傳統(tǒng)龍門架玻璃上料無法實現(xiàn)較重的玻璃上料,且無法去除玻璃間隔的墊塊。?目前,很多鈣鈦礦光伏生產(chǎn)企業(yè)多采用人工上料以及人工去除墊塊方式進行生產(chǎn),節(jié)拍慢、效率低下。
技術(shù)實現(xiàn)思路
1、針對現(xiàn)有技術(shù)中存在的不足,本實用新型的目的在于提供一種結(jié)構(gòu)簡單、使用方便的鈣鈦礦基板上料系統(tǒng),該基板上料系統(tǒng)能夠通過自動吸板上料,通過六軸機器人帶動吸板的手臂垂直動作,從而去除基板間隔墊塊,并收集隔離墊塊到固定位置,并將基板放置在帶歸正的流水線上,流水線歸正完后,將基板輸送到下一工序,實現(xiàn)快速自動連續(xù)上料,同時降低人工勞動強度,可以有效解決技術(shù)背景中的問題。
2、為實現(xiàn)上述目的,本實用新型的技術(shù)方案為:一種鈣鈦礦基板上料系統(tǒng),包括上料裝置和放料裝置,所述上料裝置包括六軸機器人和取基板手臂機構(gòu),取基板手臂機構(gòu)安裝在六軸機器人的第六軸上;所述放料裝置包括輸送流水線和歸正機構(gòu),歸正機構(gòu)安裝在輸送流水線上,用于歸正放置在輸送流水線上的基板。
3、進一步的,所述取基板手臂機構(gòu)包括吸板手臂框架和真空吸盤,吸板手臂框架的一側(cè)通過法蘭安裝在六軸機器人的第六軸上,吸板手臂框架上與六軸機器人的第六軸相對一側(cè)均勻分布安裝真空吸盤。
4、進一步的,所述取基板手臂機構(gòu)還包括真空發(fā)生器和真空檢測壓力表,真空發(fā)生器安裝在吸板手臂框架橫梁的內(nèi)側(cè),真空檢測壓力表安裝在吸板手臂框架上,真空發(fā)生器通過分組軟管與真空吸盤相連,真空吸盤的氣管同時連接真空檢測壓力表。
5、進一步的,所述取基板手臂機構(gòu)還包括吸真空電磁閥,吸真空電磁閥安裝在吸板手臂框架上,吸真空電磁閥出口端與真空發(fā)生器連接,通過控制吸真空電磁閥的通斷來控制真空發(fā)生器是否產(chǎn)生負壓吸力。
6、進一步的,所述取基板手臂機構(gòu)還包括吸板檢測頂針和頂針到位檢測傳感器,吸板檢測頂針通過支架安裝在吸板手臂框架上,頂針到位檢測傳感器安裝在吸板檢測頂針支架上。
7、進一步的,所述六軸機器人設(shè)有機器人電柜,真空檢測壓力表信號和頂針到位檢測傳感器信號均接入到機器人電柜輸入信號口,吸真空電磁閥與機器人電柜連接,機器人電柜通過軟件控制吸真空電磁閥打開或關(guān)閉。
8、進一步的,所述輸送流水線用于放置六軸機器人所抓取的基板,歸正機構(gòu)安裝在輸送流水線長邊兩側(cè)。
9、進一步的,所述放料裝置還包括光電傳感器,光電傳感器安裝在輸送流水線上,用于檢測輸送流水線上是否有基板。
10、進一步的,所述放料裝置還包括輸送線電柜,輸送線電柜安裝在輸送流水線框架下方,光電傳感器與輸送線電柜電連接;當基板需要放置在輸送流水線上時,輸送線電柜與機器人電柜需要進行信號交互。
11、采用本實用新型技術(shù)方案的優(yōu)點為:
12、1、本實用新型的基板上料系統(tǒng)能夠通過自動吸板上料,通過六軸機器人帶動吸板的手臂垂直動作,從而去除基板間隔墊塊,并收集隔離墊塊到固定位置,并將基板放置在帶歸正的流水線上,流水線歸正完后,將基板輸送到下一工序,實現(xiàn)快速自動連續(xù)上料,同時降低人工勞動強度,可以有效解決技術(shù)背景中的問題。
13、2、與現(xiàn)有技術(shù)相比,本實用新型的基板上料系統(tǒng),對于大而厚重的基板,可以實現(xiàn)自動化上料,且去除基板中間的墊塊,代替人工勞作,降低了人工勞動強度,同時可以實現(xiàn)連續(xù)化作業(yè),確保安全生產(chǎn),提高了勞動生產(chǎn)率。
技術(shù)特征:
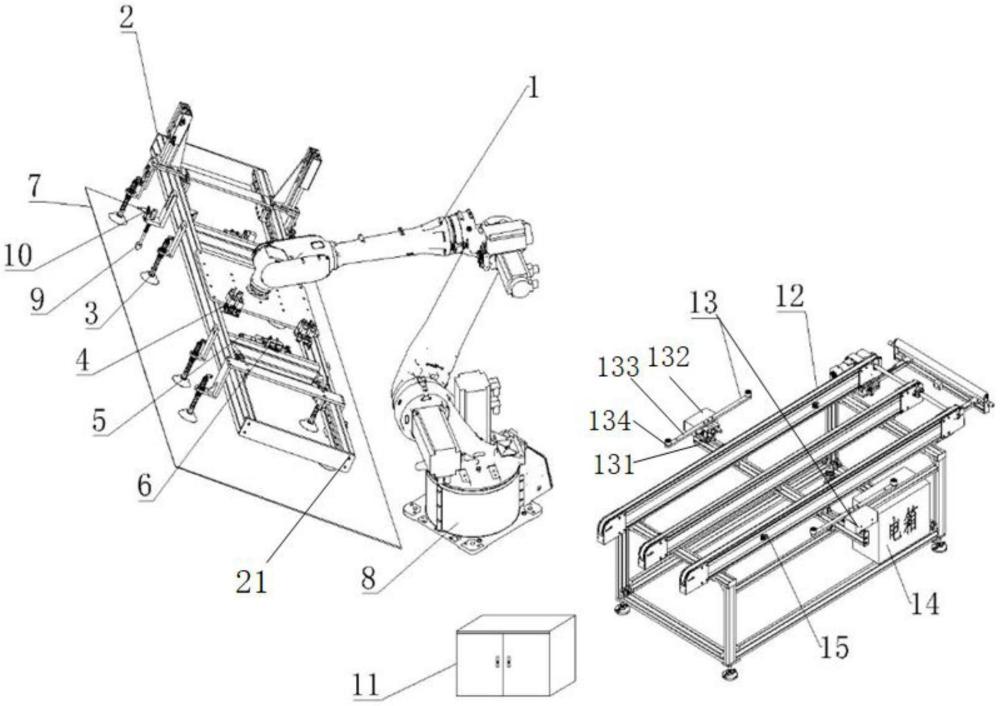
1.一種鈣鈦礦基板上料系統(tǒng),包括上料裝置和放料裝置,其特征在于:所述上料裝置包括六軸機器人(1)和取基板手臂機構(gòu)(2),取基板手臂機構(gòu)(2)安裝在六軸機器人(1)的第六軸上;所述放料裝置包括輸送流水線(12)和歸正機構(gòu)(13),歸正機構(gòu)(13)安裝在輸送流水線(12)上,用于歸正放置在輸送流水線上的基板。
2.如權(quán)利要求1所述的一種鈣鈦礦基板上料系統(tǒng),其特征在于:所述取基板手臂機構(gòu)(2)包括吸板手臂框架(21)和真空吸盤(3),吸板手臂框架(21)的一側(cè)通過法蘭安裝在六軸機器人(1)的第六軸上,吸板手臂框架(21)上與六軸機器人(1)的第六軸相對一側(cè)均勻分布安裝真空吸盤(3)。
3.如權(quán)利要求2所述的一種鈣鈦礦基板上料系統(tǒng),其特征在于:所述取基板手臂機構(gòu)(2)還包括真空發(fā)生器(5)和真空檢測壓力表(6),真空發(fā)生器(5)安裝在吸板手臂框架(21)橫梁的內(nèi)側(cè),真空檢測壓力表(6)安裝在吸板手臂框架(21)上,真空發(fā)生器(5)通過分組軟管與真空吸盤(3)相連,真空吸盤(3)的氣管同時連接真空檢測壓力表(6)。
4.如權(quán)利要求3所述的一種鈣鈦礦基板上料系統(tǒng),其特征在于:所述取基板手臂機構(gòu)(2)還包括吸真空電磁閥(4),吸真空電磁閥(4)安裝在吸板手臂框架(21)上,吸真空電磁閥(4)出口端與真空發(fā)生器(5)連接,通過控制吸真空電磁閥(4)的通斷來控制真空發(fā)生器是否產(chǎn)生負壓吸力。
5.如權(quán)利要求4所述的一種鈣鈦礦基板上料系統(tǒng),其特征在于:所述取基板手臂機構(gòu)(2)還包括吸板檢測頂針(9)和頂針到位檢測傳感器(10),吸板檢測頂針(9)通過支架安裝在吸板手臂框架(21)上,頂針到位檢測傳感器(10)安裝在吸板檢測頂針(9)支架上。
6.如權(quán)利要求5所述的一種鈣鈦礦基板上料系統(tǒng),其特征在于:所述六軸機器人(1)設(shè)有機器人電柜(11),真空檢測壓力表(6)信號和頂針到位檢測傳感器(10)信號均接入到機器人電柜(11)輸入信號口,吸真空電磁閥(4)與機器人電柜(11)連接,機器人電柜(11)通過軟件控制吸真空電磁閥(4)打開或關(guān)閉。
7.如權(quán)利要求2至6任意一項所述的一種鈣鈦礦基板上料系統(tǒng),其特征在于:所述輸送流水線(12)用于放置六軸機器人(1)所抓取的基板(7),歸正機構(gòu)(13)安裝在輸送流水線(12)長邊兩側(cè)。
8.如權(quán)利要求7所述的一種鈣鈦礦基板上料系統(tǒng),其特征在于:所述放料裝置還包括光電傳感器(15),光電傳感器(15)安裝在輸送流水線(12)上,用于檢測輸送流水線(12)上是否有基板。
9.如權(quán)利要求8所述的一種鈣鈦礦基板上料系統(tǒng),其特征在于:所述放料裝置還包括輸送線電柜(14),輸送線電柜(14)安裝在輸送流水線(12)框架下方,光電傳感器(15)與輸送線電柜(14)電連接;當基板(7)需要放置在輸送流水線(12)上時,輸送線電柜(14)與機器人電柜(11)需要進行信號交互。
技術(shù)總結(jié)
本技術(shù)涉及鈣鈦礦光伏組件制造技術(shù)領(lǐng)域,具體涉及一種鈣鈦礦基板上料系統(tǒng),包括上料裝置和放料裝置,所述上料機構(gòu)包括六軸機器人和取基板手臂機構(gòu),取基板手臂機構(gòu)安裝在六軸機器人的第六軸上;所述放料機構(gòu)包括輸送流水線和歸正機構(gòu),歸正機構(gòu)安裝在輸送流水線上,用于歸正放置在輸送流水線上的基板。本技術(shù)的基板上料系統(tǒng)能夠通過自動吸板上料,通過六軸機器人帶動吸板的手臂垂直動作,從而去除基板間隔墊塊,并收集隔離墊塊到固定位置,并將基板放置在帶歸正的流水線上,流水線歸正完后,將基板輸送到下一工序,實現(xiàn)快速自動連續(xù)上料,同時降低人工勞動強度,可以有效解決技術(shù)背景中的問題。
技術(shù)研發(fā)人員:貢程,朱明亮,鄧志文,潘二峰,吳建清,江湖,胡海鵬,劉俐兵,張盼,劉國棟
受保護的技術(shù)使用者:安徽華遠裝備科技有限公司
技術(shù)研發(fā)日:20240719
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!