一種面向金屬粉末加工的轉(zhuǎn)運裝置及其運行方法與流程
本發(fā)明涉及一種面向金屬粉末加工的轉(zhuǎn)運裝置及其運行方法,屬于金屬粉末加工。
背景技術(shù):
1、在金屬粉末加工工藝中,通常的流程是將金屬粉末加熱熔化后,轉(zhuǎn)運至下一步工序。在這一轉(zhuǎn)運過程中,常采用重力傾倒法完成,通常通過控制加熱容器的傾斜角度將熔融粉末從一個工序轉(zhuǎn)移到另一個。該方法結(jié)構(gòu)相對簡單,但需要對傾倒速度、傾倒角度等關(guān)鍵參數(shù)進行控制,通常由液壓轉(zhuǎn)運裝置來實現(xiàn)。為了確保轉(zhuǎn)運過程的穩(wěn)定性,傾倒速度、傾倒角度以及傾倒啟動與停止的時機控制至關(guān)重要。然而,由于加熱容器和轉(zhuǎn)運容器通常由陶瓷等耐高溫材料制成,且生產(chǎn)工藝中涉及的高溫環(huán)境,使用稱重測量來監(jiān)控傾倒過程的難度較大,因此傳統(tǒng)上依賴人工目測進行觀測,通過液壓控制閥門對傾倒速度和角度進行調(diào)節(jié),存在以下缺陷:1.難以實現(xiàn)精確控制:熔融狀態(tài)下的金屬粉末具有流動性和高溫特性,使用重力傾倒法容易受到傾倒角度和速度的影響,難以保證粉末流量的均勻性。傾倒過程中,溫度變化和熔融金屬的表面張力會導(dǎo)致不穩(wěn)定的流動,影響后續(xù)工序的質(zhì)量;2.自動化程度低:雖然部分機械設(shè)備和泵送轉(zhuǎn)運裝置可以實現(xiàn)一定程度的自動化,但現(xiàn)有技術(shù)在高溫、熔融粉末的轉(zhuǎn)運過程中,通常需要大量的人工干預(yù),特別是在控制熔融粉末的流速和流量時,缺乏自動閉環(huán)控制轉(zhuǎn)運裝置。這不僅增加了操作難度,還容易導(dǎo)致誤差,影響生產(chǎn)效率和產(chǎn)品質(zhì)量。
2、因此,在熔融狀態(tài)下金屬粉末的轉(zhuǎn)運方面,現(xiàn)有技術(shù)在精確控制、溫度管理、自動化以及材料浪費等方面仍存在不足,亟需一種更加高效、安全且自動化程度更高的解決方案。本發(fā)明通過紅外熱成像技術(shù)、空間定位技術(shù)、激光測量技術(shù)進行觀測,引入動態(tài)閉關(guān)轉(zhuǎn)運裝置完成對運轉(zhuǎn)過程的線性控制,保證運轉(zhuǎn)過程的高效性以及穩(wěn)定性。
技術(shù)實現(xiàn)思路
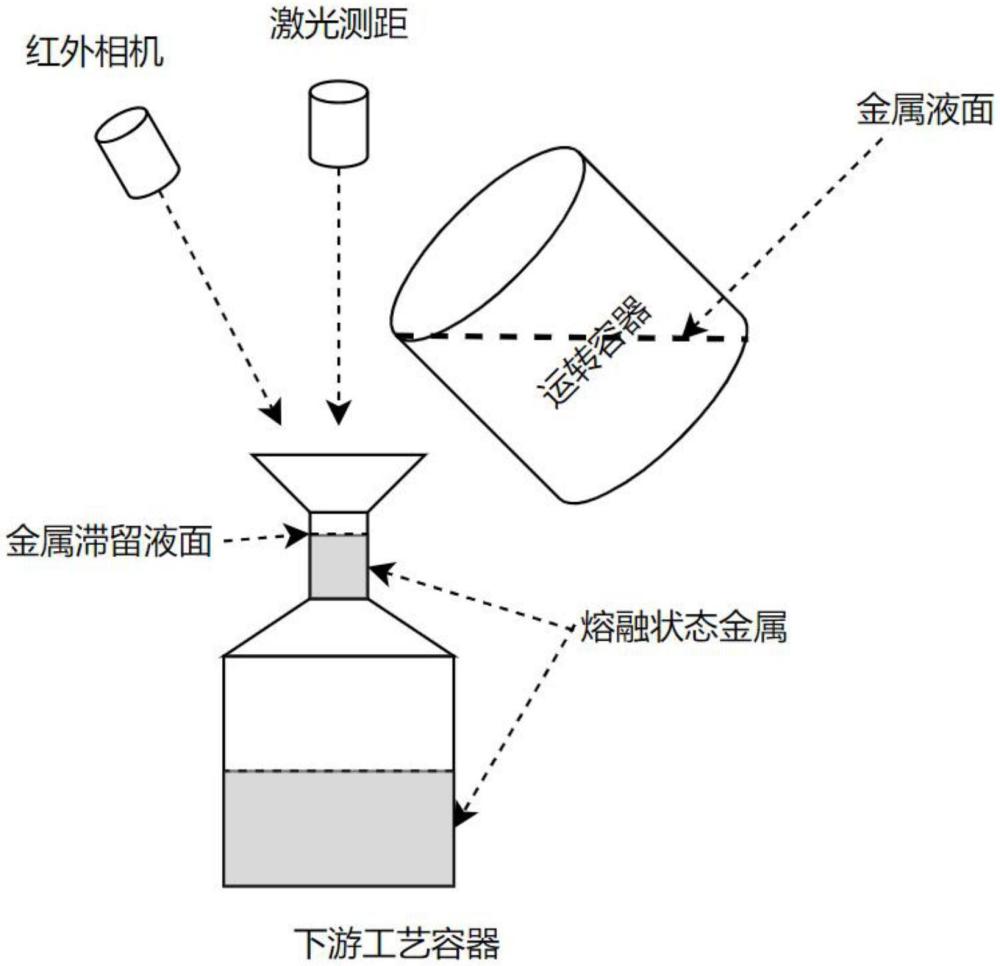
1、本發(fā)明為解決金屬粉末加工工藝中采用重力傾倒法難以實現(xiàn)精確控制以及自動化程度低的問題,進而提出一種面向金屬粉末加工的轉(zhuǎn)運裝置及其運行方法,其中轉(zhuǎn)運裝置包括:運轉(zhuǎn)容器、紅外相機、激光測距裝置和下游工藝容器;
2、下游工藝容器上設(shè)有漏斗狀開口,述運轉(zhuǎn)容器用于盛放熔融狀態(tài)下的金屬并倒入下游工藝容器,熔融狀態(tài)下的金屬在漏斗裝開口的細(xì)口位置形成金屬滯留區(qū)域,激光測距裝置用于測量金屬滯留區(qū)域和下游工藝容器中下游的熔融狀態(tài)下的金屬的距離,紅外相機用于對下游的熔融狀態(tài)下的金屬表面進行定位,通過閉環(huán)控制運轉(zhuǎn)容器的傾倒角度,完成對熔融狀態(tài)下的金屬進行運轉(zhuǎn)。
3、一種面向金屬粉末加工的轉(zhuǎn)運裝置的使用方法,包括:
4、步驟1:對運轉(zhuǎn)容器、紅外相機、激光測距裝置和下游工藝容器進行離線標(biāo)定,根據(jù)紅外相機、激光測距裝置和下游工藝容器的離線參數(shù)建立觀測量的同一坐標(biāo)系,通過運轉(zhuǎn)容器的離線標(biāo)定得到的物理參數(shù)測量,完成轉(zhuǎn)運裝置的初始化參數(shù);
5、步驟2:在線計算下游工藝容器中熔融狀態(tài)下的金屬體積,獲取運轉(zhuǎn)容器傾倒速度的要求;
6、步驟3:根據(jù)運轉(zhuǎn)容器傾倒速度的要求進行轉(zhuǎn)運裝置的在線控制,完成金屬粉末的傾倒。
7、可選的,步驟1中完成轉(zhuǎn)運裝置的初始化參數(shù)的步驟包括:
8、步驟1.1:記錄運轉(zhuǎn)容器的體積、形狀參數(shù),根據(jù)體積與形狀參數(shù)對運轉(zhuǎn)容器的內(nèi)腔進行數(shù)學(xué)建模,獲取傾倒角度與單位時間內(nèi)流出液體的體積關(guān)系,獲取運轉(zhuǎn)容器的物理參數(shù);
9、步驟1.2:通過帶有紅外led燈珠的面板對紅外相機內(nèi)參進行標(biāo)定,通過紅外相機的相機坐標(biāo)系與下游容器的物理坐標(biāo)系進行空間標(biāo)定,完成紅外相機的外參標(biāo)定;
10、步驟1.3:記錄下游容器的體積、形狀參數(shù),根據(jù)體積與形狀參數(shù)對下游容器物理參數(shù)的內(nèi)腔進行數(shù)學(xué)建模,完成對下游容器的物理參數(shù)標(biāo)定;
11、步驟1.4:對激光測距裝置的零點與下游容器的物理坐標(biāo)系進行標(biāo)定,完成激光測距裝置的標(biāo)定;
12、步驟1.5:通過對下游容器、激光測距裝置與紅外相機的標(biāo)定,完成觀測量的統(tǒng)一坐標(biāo)系建立,并且通過運轉(zhuǎn)容器的物理參數(shù)測量,完成轉(zhuǎn)運裝置的初始化參數(shù)。
13、可選的,步驟2中在線計算下游工藝容器中熔融狀態(tài)下的金屬體積的步驟包括:
14、步驟2.1:激光測量裝置以一定角度直射到熔融狀態(tài)的金屬表面,測量熔融狀態(tài)的金屬表面的距離,計算出此時盛放熔融狀態(tài)下的金屬液體表面在下游容器內(nèi)的位置;
15、步驟2.2:通過紅外相機對表面進行觀測,通過空間定位技術(shù)與離線標(biāo)定的參數(shù)對熔融狀態(tài)的金屬表面進行精準(zhǔn)定位與建模,獲取紅外測量結(jié)果;
16、步驟2.3:通過激光裝置測量結(jié)果、紅外測量結(jié)果以及下游容器物理參數(shù),計算得到下游容器中的滯留金屬體積和下游容器中的剩余體積冗余量v1;
17、步驟2.4:通過運轉(zhuǎn)容器的數(shù)學(xué)建模計算得到計算單位時間內(nèi)的熔融狀態(tài)的金屬體積流出量,并根據(jù)時間估算出已經(jīng)傾倒出容器,并且未到達(dá)下游容器中在空中的自由金屬液體的體積v2;
18、步驟2.5:根據(jù)剩余體積冗余量v1和估算在空中的自由液態(tài)金屬的體積v2進行流量轉(zhuǎn)運裝置建模,估算出單位時間內(nèi)的傾倒體積上限vt,將vt和運轉(zhuǎn)容器的數(shù)學(xué)建模結(jié)合計算得到傾倒角度的上限ang,并通過通過卡爾曼濾波計算出下一時刻的傾倒角度ang-t’。
19、可選的,步驟3中根據(jù)運轉(zhuǎn)容器傾倒速度的要求進行轉(zhuǎn)運裝置的在線控制的步驟包括:
20、步驟3.1:運行轉(zhuǎn)運裝置,自動控制運轉(zhuǎn)容器開始傾倒;
21、步驟3.2:通過步驟1獲取初始傾倒的所有物理參數(shù),轉(zhuǎn)運裝置控制運轉(zhuǎn)容器由固定速度開始傾倒;
22、步驟3.3:轉(zhuǎn)運裝置根據(jù)步驟2.5實時計算的運轉(zhuǎn)容器角度,控制液壓機構(gòu)進行自動調(diào)節(jié)傾倒角度;
23、步驟3.4:當(dāng)傾倒角度大于臨界值后或?qū)ο掠稳萜饔^測體積大于臨界值,轉(zhuǎn)運裝置完成傾倒。
24、本發(fā)明的有益效果是:
25、1、本發(fā)明能夠?qū)崿F(xiàn)自動化傾倒,對傾倒過程進行閉環(huán),保證傾倒的穩(wěn)定性與安全性;
26、2、本發(fā)明能夠采用自動化的方式進行觀測,避免人為觀測的不穩(wěn)定性。
技術(shù)特征:
1.一種面向金屬粉末加工的轉(zhuǎn)運裝置,其特征在于,所述一種面向金屬粉末加工的轉(zhuǎn)運裝置的結(jié)構(gòu)包括:
2.一種面向金屬粉末加工的轉(zhuǎn)運裝置的使用方法,應(yīng)用于權(quán)利要求1所述的一種面向金屬粉末加工的轉(zhuǎn)運裝置,其特征在于,包括:
3.根據(jù)權(quán)利要求2所述的一種面向金屬粉末加工的轉(zhuǎn)運裝置的使用方法,其特征在于,步驟1中完成轉(zhuǎn)運裝置的初始化參數(shù)的步驟包括:
4.根據(jù)權(quán)利要求2所述的一種面向金屬粉末加工的轉(zhuǎn)運裝置的使用方法,其特征在于,步驟2中在線計算下游工藝容器中熔融狀態(tài)下的金屬體積的步驟包括:
5.根據(jù)權(quán)利要求2所述的一種面向金屬粉末加工的轉(zhuǎn)運裝置的使用方法,其特征在于,步驟3中根據(jù)運轉(zhuǎn)容器傾倒速度的要求進行轉(zhuǎn)運裝置的在線控制的步驟包括:
技術(shù)總結(jié)
本發(fā)明提出一種面向金屬粉末加工的轉(zhuǎn)運裝置及其運行方法,屬于金屬粉末加工技術(shù)領(lǐng)域,解決金屬粉末加工工藝中采用重力傾倒法難以實現(xiàn)精確控制以及自動化程度低的問題,其中轉(zhuǎn)運裝置包括:運轉(zhuǎn)容器、紅外相機、激光測距裝置和下游工藝容器;下游工藝容器上設(shè)有漏斗狀開口,述運轉(zhuǎn)容器用于盛放熔融狀態(tài)下的金屬并倒入下游工藝容器,熔融狀態(tài)下的金屬在漏斗裝開口的細(xì)口位置形成金屬滯留區(qū)域,激光測距裝置用于測量金屬滯留區(qū)域和下游工藝容器中下游的熔融狀態(tài)下的金屬的距離,紅外相機用于對下游的熔融狀態(tài)下的金屬表面進行定位。
技術(shù)研發(fā)人員:劉禹欣,孫雷,李美娟,付金蕊,馮大志
受保護的技術(shù)使用者:哈爾濱拓博科技有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!