一種光纖陀螺輸出信號濾波方法與流程
本發明涉及數字濾波,特別涉及一種光纖陀螺輸出信號濾波方法。
背景技術:
1、光纖陀螺是以sagnac效應為原理發展起來的一種新型全固態角速度傳感器,在理想閉環狀態下,其輸出信號與旋轉角速度呈線性關系,然而實際光纖中由于背向散射、環境變化等因素將導致陀螺輸出信號中存在隨機噪聲和漂移。因此,必須采用輸出信號處理方法來抑制隨機噪聲和漂移。陀螺輸出信號處理方法主要有:
2、1)對陀螺輸出信號的隨機噪聲和漂移建模,依據模型進行補償。
3、2)直接對陀螺輸出信號進行濾波,通過信號消噪來抑制陀螺噪聲和漂移。
4、實際情況下,陀螺輸出信號的隨機噪聲和漂移往往是弱非線性、非平穩、慢時變的,無法建立其精確模型,且信號輸出受外部環境不確定因素影響,事先不可能得到準確統計特性,所建立的模型也是時變的,必須在線擬合其模型、辨識參數才能達到補償效果,這在實時控制中難以實現。
5、采用有效的濾波方法可以消除高于載體姿態運動頻帶寬度的噪聲,提高光纖陀螺輸出信號精度。現有的光纖陀螺輸出信號濾波方法包括平滑濾波、小波變換濾波和iir濾波方法。其中,
6、1)滑動濾波算法簡單,便于實現,易保證實時性;對于平穩信號濾波效果較好,而對于突變信號效果差,它對于頻帶之外的頻譜不加區分的予以濾除,因此對混雜在噪聲信號中的真實信號的高頻成分也產生抑制,并且不能濾除低頻干擾;
7、2)小波變換濾波可以方便、有效地濾除光纖陀螺高頻噪聲,也可有選擇地對噪聲成分進行抑制,手段靈活,小波分解尺度越大,效果越好,但小波變換濾波過程中需對輸出信號噪聲方差進行估計,所需測試數據較多,計算量會大幅度增加,影響陀螺輸出實時性。
8、3)iir數字濾波初始過度時間較長,系統延時較大。
技術實現思路
1、為解決傳統濾波方法延時較大、計算量大、高頻噪聲和突變濾除效果不佳等問題,本公開提供了一種光纖陀螺輸出信號濾波方法。該方法在降低陀螺輸出穩定性、抑制高頻噪聲、實時性等方面具有更好的優勢。
2、本公開提供的光纖陀螺輸出信號濾波方法,將以前時刻的陀螺輸出信號乘以相應權重來估計當前時刻的陀螺輸出信號。權重值通過迭代來獲得。
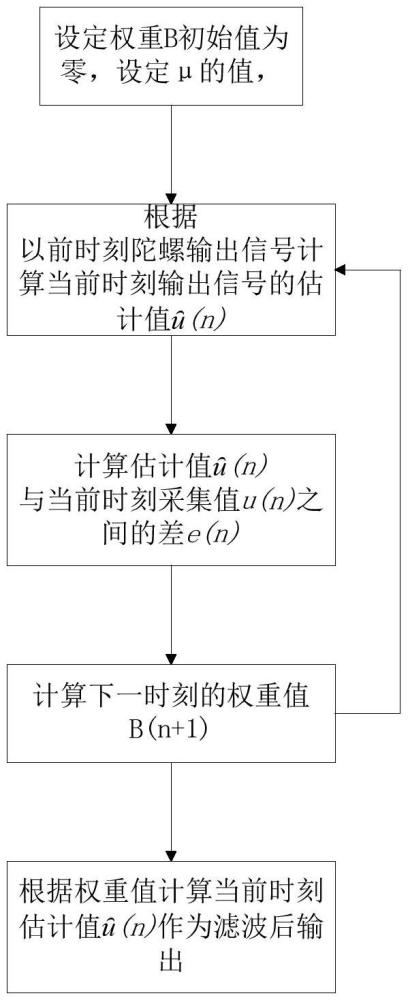
3、具體方案為:
4、首先設定權重初始值為零,將m個以前時刻的陀螺輸出信號乘以相應權重計算當前時刻陀螺輸出信號的估計值。
5、計算當前時刻采集的陀螺信號與估計值之間的差值。
6、根據差值、當前時刻權重值、m個以前時刻的陀螺輸出信號和迭代步長μ估計下一時刻的權重值。
7、不斷重復上述過程,實時更新權重,逐漸獲得一個穩定收斂的權重值。
8、使用新的權重值計算得到濾波后的陀螺輸出信號。
9、迭代步長μ是一個很小的常量,用來控制迭代的收斂速度。μ取值越大迭代速度越快,但取值過大會導致迭代過程發散。μ最小值無限制,大于零即可。μ的最大值為:μmax=1/λmin
10、其中,λmin為陀螺信號輸入向量自相關矩陣最小的特征值,自相關矩陣r為
11、r=ut(n-1)u(n-1)
12、u(n-1)為陀螺信號輸入向量,包括m個以前時刻的陀螺輸出信號。
13、與現有技術相比,本公開的有益效果是:1)實時性較高;2)時間延遲小;3)初始過渡過程短;4)實時建模確定隨機濾波參數,能比較準確地建立隨機噪聲模型,消除時域隨機特性不同的噪聲;5)比較真實的反映了原始數據的波動情況,保留了原始信號的有用信息,而且flp濾波后的數據無毛刺,能更好的去除信號中的高頻噪聲。
技術特征:
1.一種光纖陀螺輸出信號濾波方法,包括以下步驟:
2.根據權利要求1所述的方法,其特征在于,所述步驟s1具體包括:
3.根據權利要求2所述的方法,其特征在于,所述迭代步長μ的最大值為:
4.根據權利要求2或3所述的方法,其特征在于,所述步驟s2中,陀螺輸出信號估計值與當前時刻采集值之間的差為
5.根據權利要求4所述的方法,其特征在于,所述步驟s3中,下一時刻的權重值為
6.根據權利要求4所述的方法,其特征在于,所述步驟s4包括:
技術總結
一種光纖陀螺輸出信號濾波方法,該方法將以前時刻的陀螺輸出信號乘以相應權重來估計當前時刻的陀螺輸出信號;權重值通過在初始值的基礎上,不斷計算當前時刻采集的陀螺信號與估計值之間的差值進行迭代獲取。該方法實時性較高,時間延遲小,初始過渡過程短,能比較準確地建立隨機噪聲模型,消除時域隨機特性不同的噪聲,同時能更好的去除信號中的高頻噪聲。
技術研發人員:朱福祥,趙欣,李曉霞,張紅杰
受保護的技術使用者:河北漢光重工有限責任公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!