一種基于四階累積量虛擬陣列的水下目標方位估計方法、系統及裝置
本發明涉及陣列信號處理的,更具體地,涉及一種基于四階累積量虛擬陣列的水下目標方位估計方法、系統及裝置。
背景技術:
1、隨著科技的不斷進步,無論是民用、科研還是軍事領域,對水下資源的探索日益深入,且正逐步向深海拓展。深海捕撈作業、水下資源探測,以及艦船與潛艇的水下行動,無一不依賴于先進的水下工作設備。然而,水下世界因其能見度極低、環境極端且多變,為這些設備的運用帶來了巨大挑戰。在此背景下,如何賦能水下工作設備以精準的目標方位估計能力,已成為當前研究的重要課題。
2、利用天線陣列接收水下設備如艦船、潛艇、勘探設備所發出的輻射信號,可通過算法估計出所接收輻射信號的來波到達方位(doa,direction?ofarrival),水下目標輻射信號的doa即是該目標所在方位。
3、doa估計是指根據天線陣列的接收信號估計出單個或多個信號源的方位信息。由于激勵信號和方向圖之間存在傅里葉關系,doa估計也可以等效為譜估計問題。陣列信號處理技術是doa估計的核心,專注于處理由輻射傳感器陣列感測或接收的信號。目前,以基于子空間的doa估計方法最為先進和成熟,其中,最具有代表意義的是schmidt?r?o等人提出的多重信號分類算法(music,multiple?signal?classification),該算法主要思路是依據矩陣的譜分解理論將陣列接收數據的協方差矩陣劃分為信號子空間和與之正交的噪聲子空間,利用信號子空間和噪聲子空間相互正交的特性建立譜函數,然后對其峰值求解,得到信號的角度估計值,從而使算法的分辨力等方面的性能得到改善,同時也突破了傳統空間譜估計算法中陣列對波達方向(doa)估計的物理孔徑限——瑞利限,進而推動了關于子空間類算法研究的發展。但該類算法存在以下缺點:(1)假設環境中存在的噪聲為高斯加性白噪聲,且對每個天線陣列陣元的影響一致,在實際環境中,噪聲多為高斯有色噪聲,在該噪聲下該類算法的精度難以達到預期。(2)需要進行特征值分解,而特征值分解過程運算復雜度高,計算開支遠大于一般矩陣運算,而水下工作設備一般是移動設備,較大的運算開支對設備功率、續航、成本均會帶來較大考驗。(3)進行特征值分解后,使用該算法的前提是水下目標數量已知或已被正確估計,但在實際場景中,尤其是軍事探查場景中,水下目標的數量是未知的。(4)該算法有一定數目的天線陣列陣元要求,但在實際場景中,水下目標多是成群出現,在實施該算法時,需要使用較多陣列陣元,將大大提高硬件成本、計算成本和維護成本。(5)該算法需要進行空間譜搜索,搜索過程是遍歷運算的過程,doa估計精度與搜索步長直接掛鉤,若搜索步長較小則遍歷次數增大,運算復雜度和運算時間也隨之提升,簡而言之,該類算法無法兼顧精度和運算復雜度。
4、高階累積量,特別是四階累積量,因其對高斯噪聲不敏感且能夠擴展虛擬陣列孔徑的特性,在doa估計中得到了廣泛關注。通過利用高階累積量,可以在高斯色噪聲背景下實現非高斯信號的方位譜估計,從而提高doa估計的精度和穩健性。如現有技術公開了一種基于四階累量的互質陣列波達方向角估計方法,通過構建一層互質陣列和二層互質陣列,計算所有四階累量并構造四階累量矩陣,最終實現波達方向角的估計,在陣元數量有限的情況下大大提高了陣列可識別的信源數目。但在該方法中,首先需要特征值分解,運算復雜度大,而且信源目標數量需要提前確定,并且需要計算空間譜,而且需要根據信源目標數量從空間譜中尋找譜峰,無法兼顧運算復雜度和方位估計精度。
技術實現思路
1、為解決當前基于四階累積量的doa估計方式無法兼顧運算復雜度和方位估計精度的問題,本發明提出了一種基于四階累積量虛擬陣列的水下目標方位估計方法、系統及裝置,基于四階累積量,抗噪能力強,整體運算復雜度低、開支小,而且待估計目標數量不需要已知,通過設計特殊的稀疏陣列布局,突破了物理陣元數量對估計自由度的限制,提高了對水下目標方位的估計精度。
2、為了達到上述技術效果,本發明的技術方案如下:
3、第一方面,本技術提出一種基于四階累積量虛擬陣列的水下目標方位估計方法,包括以下步驟:
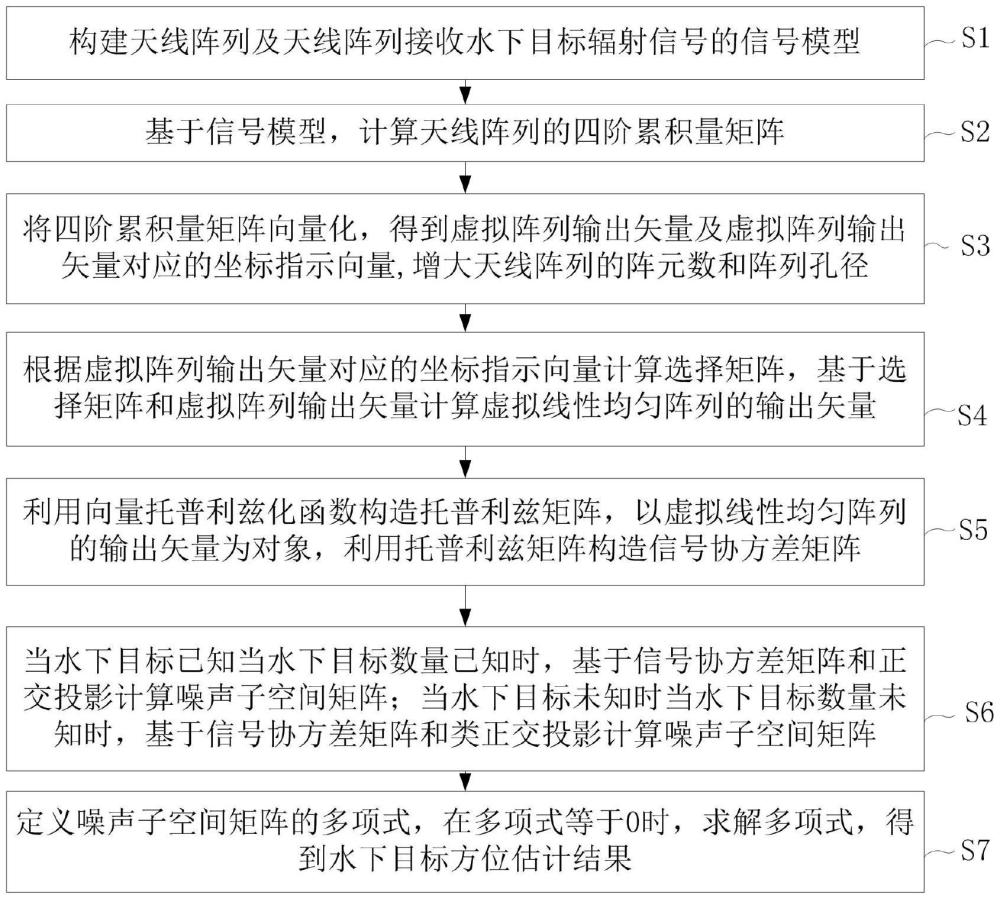
4、s1:構建天線陣列及天線陣列接收水下目標輻射信號的信號模型;
5、s2:基于信號模型,計算天線陣列的四階累積量矩陣;
6、s3:將四階累積量矩陣向量化,得到虛擬陣列輸出矢量及虛擬陣列輸出矢量對應的坐標指示向量,增大天線陣列的陣元數和陣列孔徑;
7、s4:根據虛擬陣列輸出矢量對應的坐標指示向量計算選擇矩陣,基于選擇矩陣和虛擬陣列輸出矢量計算虛擬線性均勻陣列的輸出矢量;
8、s5:利用向量托普利茲化函數構造托普利茲矩陣,以虛擬線性均勻陣列的輸出矢量為對象,利用托普利茲矩陣構造信號協方差矩陣;
9、s6:當水下目標數量已知時,基于信號協方差矩陣和正交投影計算噪聲子空間矩陣;當水下目標數量未知時,基于信號協方差矩陣和類正交投影計算噪聲子空間矩陣;
10、s7:定義噪聲子空間矩陣的多項式,在多項式等于0時,求解多項式,得到水下目標方位估計結果。
11、優選的,天線陣列包括原點陣元、第一子陣列和第二子陣列,在構建天線矩陣時,設置互質數m和互質數d,原點陣元為放置于原點的陣元,坐標為0,第一子陣列的第一個陣元放置于坐標nd處,隨后每間隔2nd放置一個陣元,一共放置個陣元,第二子陣列的第一個陣元放置于坐標md處,隨后每間隔2md放置一個陣元,一共放置個陣元布置,其中,d為陣元間隔單位距離,表示向上取整;構建的天線陣列的物理陣元坐標集表示為:
12、
13、構建的天線陣列的陣列孔徑為mnd,物理陣元的數目l表示為:
14、
15、優選的,設存在k個水下目標,水下目標輻射信號的波長記為λ,發射的k個信號記為{s1(t),s2(t),…,sk(t)},k個信號的功率為doa表示為{θ1,θ2,…,θk},則天線陣列接收水下目標輻射信號的信號模型表示為:x(t)=as(t)+n(t),其中,表示輸出矢量,表示復數集;表示信號矢量;表示噪聲矢量;表示導向矩陣,表示導向矢量,表示天線陣列中第l個物理陣元的坐標,按坐標從小到大排列,
16、優選的,基于信號模型,計算天線陣列的四階累積量矩陣的過程為:
17、定義四階累積量函數cum4{·,·,·,·},環境噪聲的四階累積量為水下目標信號的四階累積量為:
18、天線陣列的四階累積量矩陣cx表達式為:
19、
20、其中,表示克羅內克積;(·)h表示矩陣轉置;(·)*表示矩陣共軛,e{·}表示期望計算。
21、根據上述技術方案,由于四階累積量對高斯噪聲和干擾的不敏感性,對天線陣列的輸出進行四階累積量統計運算,抗噪能力強,可以去除環境中的高斯有色噪聲。
22、優選的,將四階累積量矩陣cx向量化,得到虛擬陣列輸出矢量,表達式為:
23、y=vec(cx)=bcs
24、其中,表示單快拍虛擬陣列輸出矢量;表示水下目標信號四階累積量矢量;表示虛擬陣列導向矩陣,表示虛擬陣列導向矢量;
25、虛擬陣列輸出矢量y中的元素表示為:
26、
27、其中,1≤j,l,m,n≤l;虛擬陣列的物理陣元坐標集表示為:
28、定義向量定義物理陣列輸出矢量的坐標指示向量坐標指示向量vx中第i個元素值為物理陣列的輸出矢量x(t)中第i個元素對應的物理陣元的坐標;則虛擬陣列輸出矢量y的坐標指示向量的計算表達式為:
29、優選的,虛擬陣列包含有一段由l'=2(mn+m+n)-1個虛擬陣元組成的虛擬線性均勻陣列ula,虛擬線性均勻陣列ula的陣元間距均為d,則虛擬線性均勻陣列ula的陣列孔徑達到2(mn+m+n-1)d;
30、記虛擬線性均勻陣列ula的陣列輸出為則的坐標指示向量為其中,
31、選擇矩陣計算表達式為:
32、基于選擇矩陣和虛擬陣列輸出矢量計算虛擬線性均勻陣列的輸出矢量的表達式為:
33、根據上述技術方案,通過與四階累積量結合,獲得的虛擬線性均勻陣列ula的陣列孔徑達到2(mn+m+n-1)d,使用個陣元就能最多估計出mn+m+n-1個水下目標,大大提升了doa估計自由度和估計精度。
34、優選的,定義向量托普利茲化函數t(·),以向量后(n-1)m+1個元素為第一列元素、以向量前(n-1)m+1個元素的倒序為第一行元素,構造托普利茲矩陣,利用托普利茲矩陣構造信號協方差矩陣,表達式為:
35、其中,表示對角矩陣,表示虛擬線性均勻陣列ula的導向矩陣,表示虛擬線性均勻陣列ula的導向矢量;
36、當水下目標數量已知時,基于信號協方差矩陣和正交投影計算噪聲子空間矩陣:
37、選擇信號協方差矩陣r中的前k列矩陣,k表示已知的水下目標數量;噪聲子空間矩陣計算表達式為:
38、
39、當水下目標數量未知時,基于信號協方差矩陣和類正交投影計算噪聲子空間矩陣:
40、
41、其中,μ為預設的極小值。
42、根據上述技術手段,利用水下目標是否已知,可以選擇不同的噪聲子空間矩陣計算方法,并且使用一般矩陣乘法運算來計算噪聲子空間矩陣,相較于傳統特征值分解提取噪聲子空間的方式,運算復雜度低、開支小。而且在水下目標數量未知時,仍可以計算噪聲子空間矩陣,避免了傳統提取噪聲子空間矩陣時需要確定水下目標數量的問題。
43、優選的,噪聲子空間矩陣與虛擬線性均勻陣列ula的導向矢量垂直,則定義多項式則多項式系數為:
44、
45、在多項式等于0時,求解多項式,記多項式的解為符號得到水下目標方位估計結果:表示的估計值;其中,多項式能解出個解,由于多項式系數的共軛對稱性,得到的解兩兩互耦,得到個非耦合解,虛擬線性均勻陣列ula的陣列孔徑達到2(mn+m+n-1)d,估計自由度為個水下目標。
46、根據上述技術手段,通過設計和求解多項式,可以直接解析獲得水下目標方位估計結果,相較于傳統采用空間譜搜索遍歷的方式,運算復雜度低,又能保證估計精度。
47、第二方面,本技術提出一種基于四階累積量虛擬陣列的水下目標方位估計系統,所述系統用于實現所述的方法,包括:
48、天線陣列構建單元,用于構建天線陣列及天線陣列接收水下目標輻射信號的信號模型;
49、四階累積量矩陣構建單元,基于信號模型,計算天線陣列的四階累積量矩陣;
50、向量化單元,用于將四階累積量矩陣向量化,得到虛擬陣列輸出矢量及虛擬陣列輸出矢量對應的坐標指示向量,增大天線陣列的陣元數和陣列孔徑;
51、輸出矢量計算單元,根據虛擬陣列輸出矢量對應的坐標指示向量計算選擇矩陣,基于選擇矩陣和虛擬陣列輸出矢量計算虛擬線性均勻陣列的輸出矢量;
52、信號協方差矩陣構造單元,利用向量托普利茲化函數構造托普利茲矩陣,以虛擬線性均勻陣列的輸出矢量為對象,利用托普利茲矩陣構造信號協方差矩陣;
53、噪聲子空間矩陣計算單元,當水下目標數量已知時,基于信號協方差矩陣和正交投影計算噪聲子空間矩陣;當水下目標數量未知時,基于信號協方差矩陣和類正交投影計算噪聲子空間矩陣;
54、估計單元,用于定義噪聲子空間矩陣的多項式,在多項式等于0時,求解多項式,得到水下目標方位估計結果。
55、第三方面,本技術提出一種基于四階累積量虛擬陣列的水下目標方位估計裝置,所述裝置裝設有所述的系統。
56、與現有技術相比,本發明技術方案的有益效果是:
57、本發明提出一種基于四階累積量虛擬陣列的水下目標方位估計方法、系統及裝置,通過計算天線陣列輸出的四階累積量,消除高斯有色噪聲,抗噪能力強,更適用于復雜的水下目標方位估計場景,并且通過與四階累積量相結合,可以增大天線陣列的陣元數和陣列孔徑,得到具有大孔徑、高自由度的虛擬陣列,突破了物理陣元數量對估計自由度的限制,提高了可水下目標方位估計的自由度和估計精度。本發明可根據水下目標數量是否已知來選擇不同的噪聲子空間矩陣計算方法,在水下目標數量未知時,仍然可以實現水下目標方位估計,不需要將水下目標數量作為參數,且求解噪聲子空間矩陣的過程不需要特征值分解計算,降低了運算復雜度,節省了運算開支,且通過設計多項式直接解析獲得水下目標方位估計結果,相較于空間譜遍歷的方式,降低了運算復雜度和運算開支。
- 還沒有人留言評論。精彩留言會獲得點贊!