一種模塊化多電平變流器的故障數據生成與采集方法
本發明屬于直流輸電,涉及中高壓電力電子變流器可靠性,特別涉及一種模塊化多電平變流器的故障數據生成與采集方法。
背景技術:
1、模塊化多電平變流器系統龐大,包含眾多子模塊,每個子模塊包含若干功率開關器件。功率開關器件開路故障不易在短時間內引起子模塊級顯著故障特征,使得故障子模塊難以被快速識別與旁路。現有故障定位方法一般分為兩類,基于硬件的故障定位方法及基于軟件的故障定位方法,其中,基于軟件的故障定位方法因其適用范圍廣、無需額外硬件引入、成本低等優勢廣受歡迎。
2、基于軟件的故障定位方法包括基于模型的故障定位方法及基于數據的故障定位方法。其中,基于模型的故障定位方法需要設置合適的閾值,從而通過對比故障子模塊相關變量與參考值之間的差值,確定故障子模塊的位置;由于模塊化多電平變流器往往面臨較為復雜的運行環境以及多種不同的工況,閾值設置較難完全滿足不同情況下的精確快速定位要求。基于數據的故障定位方法通過對采集數據進行訓練,可自動識別故障子模塊,無需設置閾值,能夠實現快速準確實現故障定位。然而,故障數據的獲取成為該方法獲得廣泛推廣的瓶頸之一。由于實際工程中的故障數據量較少,無法滿足數據訓練要求;通過實驗室樣機模擬,在故障模擬過程中容易由于故障程度的高低損壞樣機,造成成本嚴重升高;且實驗室樣機模擬獲得的數據訓練結果不一定能夠滿足實際工程的運行要求。
3、目前針對模塊化多電平變流器開路故障數據采集的方法多為基于仿真模型或實驗室小功率樣機數據采集,現有方法可能無法滿足實際工程在復雜場景下與多功率等級下運行的定位要求,同時,小功率樣機的故障數據獲取過程對樣機有一定破壞性與傷害性,在大體量故障數據獲取的需求下,數據生成與采集的成本較高。
4、因此,有必要探索更高效率、更低成本、更高可靠、適應性更強的故障數據生成與采集方法,實現模塊化多電平變流器基于數據的精確快速故障定位,提高運行可靠性。
技術實現思路
1、本發明的目的,在于提供一種模塊化多電平變流器的故障數據生成與采集方法,無需任何硬件引入,可廣泛應用于多種電壓等級與功率等級,數據采集過程不影響模塊化多電平變流器的正常運行,對設備無損害,可實現低成本、高可靠的故障數據采集。
2、為了達成上述目的,本發明的解決方案是:
3、一種模塊化多電平變流器的故障數據生成與采集方法,所述模塊化多電平變流器為三相拓撲結構,每一相均包含由正極到連接點的上橋臂和由連接點到負極的下橋臂,其中,上橋臂包含由正極到連接點順序串聯的n個子模塊和第一電感,下橋臂包含由負極到連接點順序串聯的n個子模塊和第二電感;各子模塊均包含有上管、下管和電容;所述方法包括,
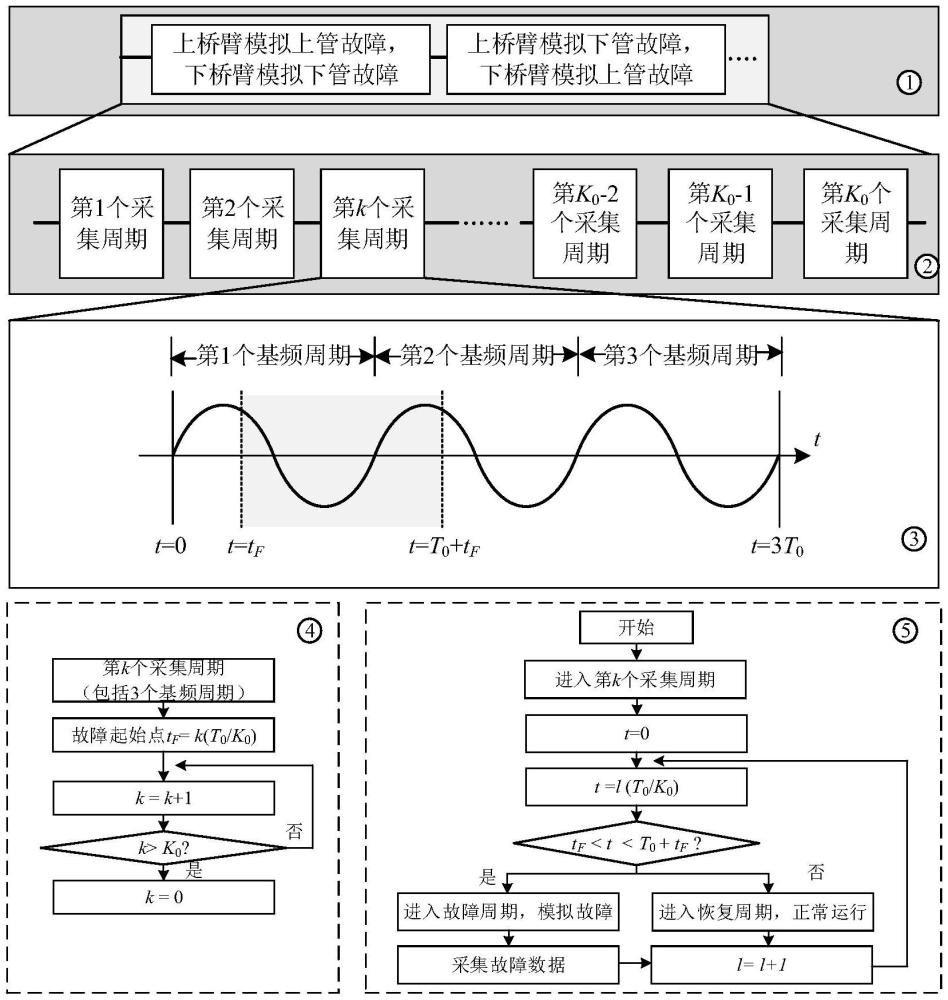
4、將每個采集周期tsam劃分為故障周期和恢復周期,其中,采集周期的時長為tsam=3t0,t0為一個基頻周期;所述采集周期的起始點t0為第一個基頻周期的交流電流從負變為正的過零點;所述故障周期的時長為1個基頻周期t0,其起始點tf為[t0,t0+t0];每個采集周期內,除故障周期[tf,tf+t0]外,其余時間段均為恢復周期;
5、在各個故障周期內,隨機標定一個子模塊作為目標子模塊,控制其模擬開路故障,以獲取故障數據。
6、其中,在故障周期[tf,tf+t0]內,生成與采集上管開路故障數據的過程為,
7、步驟a1,當橋臂電流ixy>0時,目標子模塊的上管和下管開關信號為:t1=sf,t2=sf';其中,x為橋臂所在相位,x=a,b,c,y為x相的y橋臂,y=p,n,p表示上橋臂,n表示下橋臂;當sf=0或1時,nxy=nxy0,其中,nxy為對應橋臂子模塊投入個數的實際指令信號,nxy0為橋臂控制產生的對應橋臂子模塊投入個數的參考指令信號;sf為目標子模塊的輸出指令信號;
8、當橋臂電流ixy≤0時,目標子模塊的上管和下管開關信號為:t1=0,t2=sf';當sf=0時,nxy=nxy0;當sf=1時,nxy=nxy0+1;
9、步驟a2,分別采集該故障周期[tf,tf+t0]內的橋臂電流ixy、目標子模塊開關信號sf、目標子模塊電容電壓ucf。
10、其中,在故障周期[tf,tf+t0]內,生成與采集下管開路故障數據的過程為,
11、步驟b1,當橋臂電流ixy≤0時,目標子模塊的上管和下管開關信號為:t1=sf,t2=sf';當sf=0或1時,nxy=nxy0;
12、當橋臂電流ixy>0時,目標子模塊的上管和下管開關信號為:t1=sf,t2=0;當sf=0時,nxy=nxy0-1;當sf=1時,nxy=nxy0;
13、步驟b2,分別采集該故障周期[tf,tf+t0]內的橋臂電流ixy、目標子模塊開關信號sf、目標子模塊電容電壓ucf。
14、其中,在恢復周期內,橋臂子模塊投入個數指令始終為nxy=nxy0,目標子模塊的開關指令始終為t1=sf,t2=sf'。
15、其中,每個橋臂輪流采集上管和下管開路故障數據,輪換周期不低于k0t0。
16、其中,故障周期的起點取值為tf=t0+k?t0/k0,k0為正整數,k=1,2,…,k0。
17、其中,隨機標定一個子模塊作為目標子模塊,控制其模擬開路故障,包括,隨機標定一個子模塊作為目標子模塊,控制其在橋臂電流為負時模擬上管開路故障,且增加橋臂子模塊投入以補償故障子模塊輸出;在橋臂電流為正時模擬下管開路故障,且減少橋臂子模塊投入以補償故障子模塊輸出,以獲取故障數據。
18、采用上述方案后,本發明首先設置完整的采集周期,規定采集周期內的故障周期與恢復周期,在不同的采集周期內,故障周期分別起始于不同的時間點;故障周期內,選定目標子模塊在橋臂電流為負時模擬上管開路故障,且增加橋臂子模塊投入以補償故障子模塊輸出;在橋臂電流為正時模擬下管開路故障,且減少橋臂子模塊投入以補償故障子模塊輸出;每個采集周期僅模擬一種故障。本發明有效解決了實際工程故障數據量小且難以獲取的挑戰,能夠以不影響模塊化多電平變流器正常運行的方式獲得大量符合實際工況的故障數據,實現高可靠性、低成本、高適應性的故障數據生成與采集,有利于提高基于數據故障定位方法的實用性、快速性與準確性。
技術特征:
1.一種模塊化多電平變流器的故障數據生成與采集方法,所述模塊化多電平變流器為三相拓撲結構,每一相均包含由正極到連接點的上橋臂和由連接點到負極的下橋臂,其中,上橋臂包含由正極到連接點順序串聯的n個子模塊和第一電感,下橋臂包含由負極到連接點順序串聯的n個子模塊和第二電感;各子模塊均包含有上管、下管和電容;其特征在于:方法包括,
2.如權利要求1所述的方法,其特征在于:在故障周期[tf,tf+t0]內,生成與采集上管開路故障數據的過程為,
3.如權利要求1所述的方法,其特征在于:在故障周期[tf,tf+t0]內,生成與采集下管開路故障數據的過程為,
4.如權利要求1所述的方法,其特征在于:在恢復周期內,橋臂子模塊投入個數指令始終為nxy=nxy0,目標子模塊的開關指令始終為t1=sf,t2=sf'。
5.如權利要求1所述的方法,其特征在于:每個橋臂輪流采集上管和下管開路故障數據,輪換周期不低于k0t0。
6.如權利要求1所述的方法,其特征在于:故障周期的起點取值為tf=t0+kt0/k0,k0為正整數,k=1,2,…,k0。
7.如權利要求1所述的方法,其特征在于:隨機標定一個子模塊作為目標子模塊,控制其模擬開路故障,包括,隨機標定一個子模塊作為目標子模塊,控制其在橋臂電流為負時模擬上管開路故障,且增加橋臂子模塊投入以補償故障子模塊輸出;在橋臂電流為正時模擬下管開路故障,且減少橋臂子模塊投入以補償故障子模塊輸出,以獲取故障數據。
技術總結
本發明公開一種模塊化多電平變流器的故障數據生成與采集方法,包括,將每個采集周期T<subgt;sam</subgt;劃分為故障周期和恢復周期,其中,采集周期的時長為3個基頻周期;所述采集周期的起始點t<subgt;0</subgt;為第一個基頻周期的交流電流從負變為正的過零點;所述故障周期的時長為1個基頻周期T<subgt;0</subgt;,其起始點t<subgt;F</subgt;為[t<subgt;0</subgt;,t<subgt;0</subgt;+T<subgt;0</subgt;];每個采集周期內,除故障周期外,其余時間段均為恢復周期;在各個故障周期內,隨機標定一個子模塊作為目標子模塊,控制其模擬開路故障,以獲取故障數據,同時通過冗余子模塊對其輸出電壓進行補償,避免影響模塊化多電平變流器正常運行。本發明提供的方法無需任何硬件引入,可廣泛應用于多種電壓等級與功率等級,數據采集過程不影響模塊化多電平變流器的正常運行,對設備無損害,可實現低成本、高可靠的故障數據采集。
技術研發人員:張雅倩,鄧富金,張建忠
受保護的技術使用者:東南大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!