電子束圖像角度校正方法、裝置、電子設備及存儲介質與流程
本公開涉及掃描電鏡,尤其涉及一種電子束圖像角度校正方法、裝置、電子設備及存儲介質。
背景技術:
1、顯微鏡是人類研究客觀世界的眼睛,其中掃描透射電子顯微鏡(scanningtransmission?electron?microscopy,stem)是應用非常廣泛的、具有納米級別表征能力的顯微鏡,常用于生物、半導體、材料學領域。然而在觀測電子束掃描生成的圖像時,因電子束探測器與運動平臺之間存在固有角度偏差,使得觀測坐標系與實際運動坐標系之間產生了不一致性,這直接導致了觀測到的圖像運動軌跡與預設運動方向相偏離。盡管通過人工調整偏轉器角度可以在一定程度上改善此問題,但是此過程不僅操作繁瑣,且效率低下,難以滿足高效、精準的圖像分析需求。
技術實現思路
1、本公開提供了一種電子束圖像角度校正方法、裝置、電子設備及存儲介質,以至少解決現有技術中存在的以上技術問題。
2、根據本公開的第一方面,提供了一種電子束圖像角度校正方法,其中,所述方法包括:
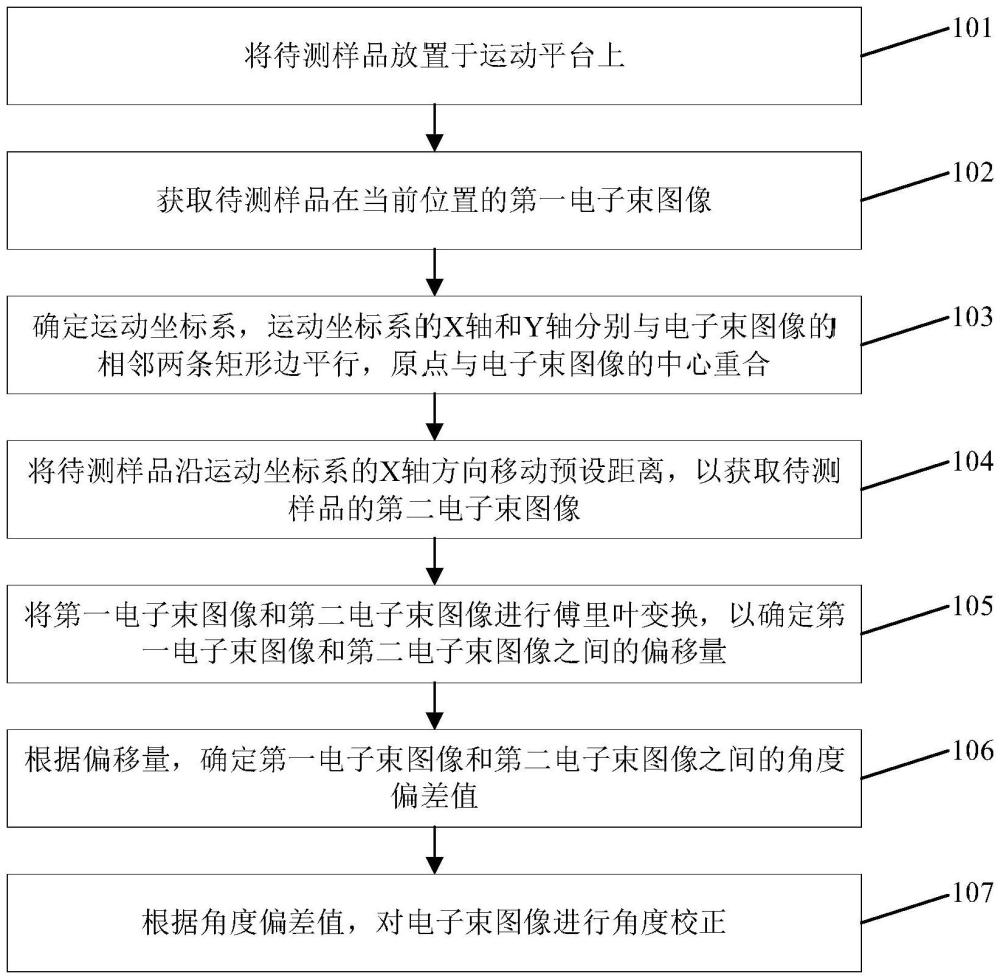
3、將待測樣品放置于運動平臺上;
4、獲取所述待測樣品在當前位置的第一電子束圖像;
5、確定運動坐標系,所述運動坐標系的x軸和y軸分別與電子束圖像的相鄰兩條矩形邊平行,原點與電子束圖像的中心重合;
6、將所述待測樣品沿所述運動坐標系的x軸方向移動預設距離,以獲取所述待測樣品的第二電子束圖像;
7、將所述第一電子束圖像和所述第二電子束圖像進行傅里葉變換,以確定所述第一電子束圖像和所述第二電子束圖像之間的偏移量;
8、根據所述偏移量,確定所述第一電子束圖像和所述第二電子束圖像之間的角度偏差值;
9、根據所述角度偏差值,對所述電子束圖像進行角度校正。
10、在一可實施方式中,將所述第一電子束圖像和所述第二電子束圖像進行傅里葉變換,以確定所述第一電子束圖像和所述第二電子束圖像之間的偏移量,包括:
11、將所述第一電子束圖像和所述第二電子束圖像通過下列公式(1)進行傅里葉變換,得到所述第一電子束圖像和所述第二電子束圖像的頻域圖,
12、
13、其中,f1(u,v)表示第一電子束圖像的頻域圖,f2(u,v)表示第二電子束圖像的頻域圖,u和v為頻域圖中的變量,(x0,y0)表示第一電子束圖像與第二電子束圖像之間的偏移量;
14、根據所述第一電子束圖像和所述第二電子束圖像的頻域圖,通過下列公式(2)得到所述偏移量的脈沖函數,
15、
16、其中,h(u,v)表示互功率譜,a1和a2分別代表f1和f2的幅值,δ(x0,y0)表示沖激函數,表示偏移量的脈沖函數;
17、當所述脈沖函數的數值最大時,確定所述偏移量。
18、在一可實施方式中,根據所述偏移量,確定所述第一電子束圖像和所述第二電子束圖像之間的角度偏差值,包括:
19、通過反正切函數將所述偏移量轉換為所述角度偏差值,其中,所述反正切函數如下列公式(3)所示:
20、θ=arctan?(y0/x0)?????????????????????(3)
21、其中,θ為角度偏差值。
22、在一可實施方式中,所述根據所述角度偏差值,對所述電子束圖像進行角度校正,包括:
23、將所述角度偏差值輸入偏轉器,以對所述電子束圖像進行角度校正。
24、根據本公開的第二方面,提供了一種電子束圖像角度校正裝置,其中,所述裝置包括:
25、夾持單元,用于將待測樣品放置于運動平臺上;
26、第一獲取單元,用于獲取所述待測樣品在當前位置的第一電子束圖像;
27、第一確定單元,用于確定運動坐標系,所述運動坐標系的x軸和y軸分別與電子束圖像的相鄰兩條矩形邊平行,原點與電子束圖像的中心重合;
28、第二獲取單元,用于將所述待測樣品沿所述運動坐標系的x軸方向移動預設距離,以獲取所述待測樣品的第二電子束圖像;
29、第二確定單元,用于將所述第一電子束圖像和所述第二電子束圖像進行傅里葉變換,以確定所述第一電子束圖像和所述第二電子束圖像之間的偏移量;
30、第三確定單元,用于根據所述偏移量,確定所述第一電子束圖像和所述第二電子束圖像之間的角度偏差值;
31、校正單元,用于根據所述角度偏差值,對所述電子束圖像進行角度校正。
32、在一可實施方式中,所述第二確定單元,具體用于:將所述第一電子束圖像和所述第二電子束圖像通過下列公式(1)進行傅里葉變換,得到所述第一電子束圖像和所述第二電子束圖像的頻域圖,
33、
34、其中,f1(u,v)表示第一電子束圖像的頻域圖,f2(u,v)表示第二電子束圖像的頻域圖,u和v為頻域圖中的變量,(x0,y0)表示第一電子束圖像與第二電子束圖像之間的偏移量;
35、根據所述第一電子束圖像和所述第二電子束圖像的頻域圖,通過下列公式(2)得到所述偏移量的脈沖函數,
36、
37、其中,h(u,v)表示互功率譜,a1和a2分別代表f1和f2的幅值,δ(x0,y0)表示沖激函數,表示偏移量的脈沖函數;
38、當所述脈沖函數的數值最大時,確定所述偏移量。
39、在一可實施方式中,所述第三確定單元,具體用于:通過反正切函數將所述偏移量轉換為所述角度偏差值,其中,所述反正切函數如下列公式(3)所示:
40、θ=arctan?(y0/x0)?????????????????????(3)
41、其中,θ為角度偏差值。
42、在一可實施方式中,所述校正單元,具體用于:將所述角度偏差值輸入偏轉器,以對所述電子束圖像進行角度校正。
43、根據本公開的第三方面,提供了一種電子設備,包括:
44、至少一個處理器;以及
45、與所述至少一個處理器通信連接的存儲器;其中,
46、所述存儲器存儲有可被所述至少一個處理器執行的指令,所述指令被所述至少一個處理器執行,以使所述至少一個處理器能夠執行本公開所述的方法。
47、根據本公開的第四方面,提供了一種存儲有計算機指令的非瞬時計算機可讀存儲介質,所述計算機指令用于使所述計算機執行本公開所述的方法。
48、本公開的電子束圖像角度校正方法、裝置、電子設備及存儲介質,通過先獲取待測樣品在當前位置的第一電子束圖像和沿運動坐標系的x軸方向移動預設距離后的第二電子束圖像,然后將第一電子束圖像和第二電子束圖像進行傅里葉變換之后,得到兩圖像之間的偏移量,進而得到角度偏差值,從而對電子束圖像進行角度校正。本公開遵循高效性原則,整體流程簡潔,無需占用大量運算資源,確保在不影響系統整體操作流程流暢性的前提下,實現了高效的數據處理;本公開摒棄了傳統的人工調整方式,不僅極大地簡化了操作步驟,降低了操作復雜度,而且通過精確計算并自動調整相關參數,確保電子束圖像的觀測結果直接反映觀測者的預期,提升了校正的精確度,進而為整體觀測系統帶來了更高的觀測精度與可靠性,使得觀測體驗更符合觀測者直觀感受。
49、應當理解,本部分所描述的內容并非旨在標識本公開的實施例的關鍵或重要特征,也不用于限制本公開的范圍。本公開的其它特征將通過以下的說明書而變得容易理解。
- 還沒有人留言評論。精彩留言會獲得點贊!