一種基于雷達與視頻融合的目標檢測系統的制作方法
本發明屬于目標檢測,具體地說是一種基于雷達與視頻融合的目標檢測系統。
背景技術:
1、在智能監控等眾多領域,準確的目標檢測至關重要;傳統的單一傳感器目標檢測方法,如僅依靠雷達或者僅依靠視頻圖像檢測,存在一定局限性;單純的雷達檢測,雖然能夠精確獲取目標的距離、速度等信息,但對于目標的類別、外形等細節特征識別能力較弱;而僅依靠視頻圖像檢測,受環境因素影響較大,如在惡劣天氣條件下,圖像質量嚴重下降,導致目標檢測的準確性和可靠性降低;且圖像檢測有時會受到遮擋物的遮擋,導致圖像檢測無法發揮應有的作用;
2、本發明提供一種基于雷達與視頻融合的目標檢測系統,將雷達檢測與視頻檢測進行融合,通過雷達檢測系統對監測目標的行動軌跡進行預測,優化攝像頭布局減少遮擋影響,進而提升對監測目標的檢測精度和效率;在遮擋物無法規避的時候,通過分析監測目標離開遮擋物后的圖像以及監測目標在被遮擋軌跡中的速度,提高追蹤檢測目標的精確性。
技術實現思路
1、本發明的目的在于提供一種基于雷達與視頻融合的目標檢測系統,以解決上述現有技術問題的至少之一。
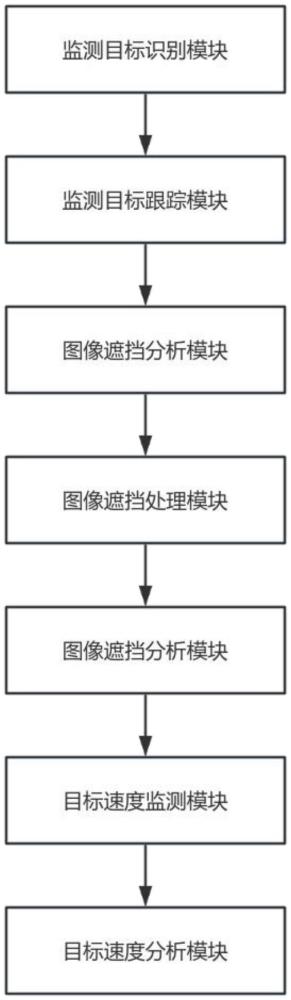
2、第一方面,本發明一種基于雷達與視頻融合的目標檢測系統,包括以下模塊:
3、監測目標識別模塊:通過毫米波雷達和監控攝像頭獲取監測區域信息,進行分析處理,識別監測區域內的監測目標和監測目標的行動軌跡;
4、監測目標跟蹤模塊:對攝像頭獲取的監測目標圖像進行分析,得到圖像表征值,根據圖像表征值的大小選擇合適的攝像頭對監測目標進行跟蹤;
5、圖像遮擋分析模塊:通過分析監測目標通過被遮擋軌跡的預測時間,判斷對監測目標的跟蹤是否受到遮擋的影響,若是,則生成遮擋信號;
6、圖像遮擋處理模塊:基于遮擋信號,判斷其他未受遮擋的攝像頭能否獲取被遮擋軌跡信息,若不能,對監測目標離開遮擋終止點后的圖像數據進行分析,得到圖像匹配值;
7、圖像遮擋分析模塊:將圖像匹配值與圖像匹配閾值進行比較,根據比較結果判斷離開遮擋終止點后的圖像中的目標是否為原監測目標,若是,則生成匹配信號;
8、目標速度監測模塊:基于匹配信號,通過毫米波雷達獲取監測目標的速度,進行數據處理,得到速度表征值;
9、目標速度分析模塊:將速度表征值與速度表征閾值進行比較,根據比較結果判斷獲取的監測目標速度是否正常,若是,則生成監測正常信號;基于監測正常信號,對監測目標進行持續監測。
10、第二方面,本發明一種基于雷達與視頻融合的目標檢測方法,包括以下步驟:
11、步驟一:通過毫米波雷達和監控攝像頭獲取監測區域信息,進行分析處理,識別監測區域內的監測目標和監測目標的行動軌跡;
12、步驟二:對攝像頭獲取的監測目標圖像進行分析,得到圖像表征值,根據圖像表征值的大小選擇合適的攝像頭對監測目標進行跟蹤;
13、步驟三:通過分析監測目標通過被遮擋軌跡的預測時間,判斷對監測目標的跟蹤是否受到遮擋的影響,若是,則生成遮擋信號;
14、步驟四:基于遮擋信號,判斷其他未受遮擋的攝像頭能否獲取被遮擋軌跡信息,若不能,對監測目標離開遮擋終止點后的圖像數據進行分析,得到圖像匹配值;
15、步驟五:將圖像匹配值與圖像匹配閾值進行比較,根據比較結果判斷離開遮擋終止點后的圖像中的目標是否為原監測目標,若是,則生成匹配信號;
16、步驟六:基于匹配信號,通過毫米波雷達獲取監測目標的速度,進行數據處理,得到速度表征值;
17、步驟七:將速度表征值與速度表征閾值進行比較,根據比較結果判斷獲取的監測目標速度是否正常,若是,則生成監測正常信號;基于監測正常信號,對監測目標進行持續監測。
18、本發明的有益效果:
19、1、本發明實施例的技術方案為:通過毫米波雷達和攝像頭對監測目標進行檢測,充分利用毫米波雷達在距離、速度測量方面的高精度以及視頻在目標分類識別方面的優勢,能夠更準確地監測目標的位置、類別等信息,相比單一傳感器檢測方式,提高了檢測系統的綜合性能;通過對監測目標的行動軌跡進行預測,分析監測目標行動軌跡上的攝像頭的拍攝角度和遮擋情況,優化攝像頭布局,進一步減少遮擋影響,提升對監測目標的檢測精度和效率。
20、2、本發明實施例的技術方案為:通過分析監測目標通過被遮擋軌跡的預測時間,判斷系統對監測目標跟蹤是否受到軌跡遮擋的影響,若是,則生成遮擋信號;基于遮擋信號,判斷其他未受遮擋的攝像頭能否獲取被遮擋軌跡信息,若不能,對監測目標離開遮擋終止點后的圖像數據進行分析,得到圖像匹配值;將圖像匹配值與圖像匹配閾值進行比較,根據比較結果判斷離開遮擋終止點后的圖像的目標是否為原監測目標,若是,則生成匹配信號;本發明能精確判斷系統對監測目標的跟蹤是否受到軌跡遮擋的影響;有助于及時發現跟蹤過程中的異常情況;判斷其他未受遮擋的攝像頭能否獲取被遮擋軌跡信息,若能獲取,可利用其他攝像頭數據補充信息,增強系統應對遮擋的能力;對監測目標離開遮擋終止點后的圖像數據進行分析,確保了即使目標在被遮擋后,系統依然能夠準確識別其身份,保證跟蹤的連續性和準確性。
21、3、本發明實施例的技術方案為:基于匹配信號,通過毫米波雷達獲取監測目標的速度,進行數據處理,得到速度表征值,進一步判斷監測目標的準確性;將速度表征值與速度表征閾值進行比較,根據比較結果判斷獲取的監測目標速度是否正常,若是,則生成監測正常信號;基于監測正常信號,對監測目標進行持續監測;本發明對監測目標速度進行分析,在復雜場景下且存在多個圖像相似目標時,通過雷達與視頻融合,通過毫米波雷達對監測目標的監測數據來輔助判斷,提高系統識別監測目標的準確性,有助于避免誤判,增強了系統的可靠性。
技術特征:
1.一種基于雷達與視頻融合的目標檢測系統,其特征在于,包括以下模塊:
2.根據權利要求1所述的一種基于雷達與視頻融合的目標檢測系統,其特征在于,所述圖像表征值的獲取方式為:
3.根據權利要求2所述的一種基于雷達與視頻融合的目標檢測系統,其特征在于,所述遮擋拍攝長度比的獲取方式為:
4.根據權利要求1所述的一種基于雷達與視頻融合的目標檢測系統,其特征在于,所述圖像匹配值的獲取方式為:
5.根據權利要求4所述的一種基于雷達與視頻融合的目標檢測系統,其特征在于,所述重合面積比的獲取方式為:
6.根據權利要求4所述的一種基于雷達與視頻融合的目標檢測系統,其特征在于,所述綜合特征匹配度的獲取方式為:
7.根據權利要求6所述的一種基于雷達與視頻融合的目標檢測系統,其特征在于,所述特征點數量比的獲取方式為:
8.根據權利要求1所述的一種基于雷達與視頻融合的目標檢測系統,其特征在于,所述速度表征值的獲取方式為:
9.根據權利要求8所述的一種基于雷達與視頻融合的目標檢測系統,其特征在于,所述偏離差分比的獲取方式為:
10.根據權利要求8所述的一種基于雷達與視頻融合的目標檢測系統,其特征在于,所述差分偏離程度值的獲取方式為:
技術總結
本發明公開了一種基于雷達與視頻融合的目標檢測系統,包括:監測目標識別模塊,監測目標跟蹤模塊,圖像遮擋分析模塊,圖像遮擋處理模塊,圖像遮擋分析模塊,目標速度監測模塊,目標速度分析模塊;通過識別監測區域內的監測目標和監測目標的行動軌跡,選擇合適的攝像頭對監測目標進行跟蹤,判斷攝像頭對監測目標的跟蹤是否受到遮擋的影響,若是,判斷能否使用其他攝像頭進行輔助,若不能,在監測目標離開遮擋范圍時,使用圖像檢測識別監測目標,并通過雷達檢測對監測目標進行追蹤,確保對監測目標監測過程的連續性;本發明分析了在視頻監測被遮擋時,利用視頻檢測和雷達檢測的融合,實現了對目標的精確監控。
技術研發人員:張程,袁秀峰,林文舵,方線偉,楊燦興
受保護的技術使用者:法蘭泰克重工股份有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!