宏圖一號分布式車輪編隊InSAR衛星高程反演方法及設備
本發明屬于合成孔徑雷達干涉測量領域,尤其涉及一種宏圖一號分布式車輪編隊insar衛星高程反演方法及設備。
背景技術:
1、數字高程模型(digital?elevation?model,dem)作為基礎地理信息數據的重要部分,廣泛應用于地形分析、可見性計算及其他多維空間分析。目前,光學影像立體匹配、激光雷達(laser?radar,lidar)和星載合成孔徑雷達干涉測量(interferometric?syntheticaperture?radar,insar)是生成大范圍dem的三種主要技術。其中,星載insar方法能夠全天候、全天時快速、準確地獲取高精度dem,特別適合在多云、多霧等復雜氣象天氣條件下穩定獲取dem,對地質災害監測、預警具有重要應用價值。
2、星載insar方法通過對同一地區獲取的具有一定視差角sar影像進行干涉分析,根據其干涉相位信息來提取地表的高程信息及重建。傳統單星insar系統主要分為單天線重復軌道干涉系統、雙天線單軌干涉系統,獲取的dem精度均受多種因素制約。
3、宏圖一號insar衛星采用一主三輔“車輪”式編隊對地觀測構形,具有基線數目多、測繪精度高、測繪效率高的優勢,基于ht-1sar數據處理方法的研究具有重要意義。
技術實現思路
1、為了解決現有dem精度受限的問題,本發明提供一種宏圖一號分布式車輪編隊insar衛星高程反演方法及設備,能夠有效提高復雜地形的dem高程反演精度。
2、根據本發明說明書的一方面,提供一種宏圖一號分布式車輪編隊insar衛星高程反演方法,包括:
3、通過建立等效相位中心,改正單基多航過insar幾何模型;
4、基于改正的單基多航過insar幾何模型配準主輔影像,生成三張不同基線長度的主輔像對干涉圖,并進行去平地相位處理;
5、對去平地相位后的干涉圖進行多基線相位解纏,恢復絕對地形相位;
6、將解纏后的相位轉換為目標場景高程,經過地理編碼處理后,生成目標區域dem。
7、作為進一步的技術方案,通過建立等效相位中心,改正輔衛星成像幾何模型,包括:
8、根據主衛星的軌道節點數據,利用自變量為時間的多項式擬合主衛星在成像時間段內的飛行軌道;
9、將輔衛星軌道節點對應時間帶入所述多項式,得到同時間主衛星的位置和速度,進而得到輔衛星軌道節點對應的等效相位中心位置;
10、使用所述多項式進行擬合,將獲取的多項式參數替換輔衛星軌道參數,完成輔衛星幾何模型改正。
11、作為進一步的技術方案,基于改正的輔衛星成像幾何模型配準主輔影像,包括:
12、粗配準:通過確定主輔衛星影像同名點位置,獲取輔衛星影像相對主衛星影像的行列坐標偏移量;
13、精配準:在主衛星影像上均勻布設控制點,根據粗配準得到的偏移量確定輔衛星影像中對應同名點的搜索范圍,按照相干系數最大原則確定輔衛星影像中同名點精確位置,建立主輔衛星的坐標映射關系,最后對輔衛星影像進行坐標變換和插值重采樣。
14、作為進一步的技術方案,在完成主輔影像配準后,還包括:
15、進行復數共軛相乘獲得差分干涉圖,并對干涉圖進行去平地相位處理。
16、作為進一步的技術方案,對去平地相位后的干涉圖進行多基線相位解纏,恢復絕對地形相位,包括:
17、構建如下目標函數并求解得到最優相位模糊數梯度:
18、
19、其中,(s,s-1)代表相鄰像素對,存在方位向和斜距向兩個方向;表示纏繞相位梯度;δki(s,s-1)是相位模糊數梯度;
20、在確定最優相位模糊數梯度后,以lp最小范數優化模型為目標函數,對各張干涉圖進行單基線相位解纏,在得到所有像素的相位模糊數后,恢復絕對地形相位。
21、作為進一步的技術方案,在地面點p=1時,將lp最小范數優化模型的求解問題轉換為線性最小化問題;在地面點p=2時,將lp最小范數優化模型的求解問題轉換為加權最小二乘問題。
22、作為進一步的技術方案,將解纏后的相位轉換為目標場景高程,經過地理編碼處理后,生成目標區域dem,包括:
23、獲取雷達坐標系下各像素對應的地面高;
24、根據干涉圖對應的垂直基線長度,結合所述地面高,得到最終高程值;
25、對所述最終高程值進行地理編碼處理,得到dem產品。
26、根據本發明說明書的一方面,提供一種宏圖一號分布式車輪編隊insar衛星高程反演設備,包括:
27、第一主模塊,用于通過建立等效相位中心,改正單基多航過insar幾何模型;
28、第二主模塊,用于基于改正的單基多航過insar幾何模型配準主輔影像,生成三張不同基線長度的主輔像對干涉圖,并進行去平地相位處理;
29、第三主模塊,用于對去平地相位后的干涉圖進行多基線相位解纏,恢復絕對地形相位;
30、第四主模塊,用于將解纏后的相位轉換為目標場景高程,經過地理編碼處理后,生成目標區域dem。
31、根據本發明說明書的一方面,提供一種宏圖一號分布式車輪編隊insar衛星高程反演設備,包括存儲器和處理器,所述存儲器存儲有被所述處理器執行的程序指令,所述處理器調用所述程序指令,以執行所述的宏圖一號分布式車輪編隊insar衛星高程反演方法的步驟。
32、根據本發明說明書的一方面,提供一種非暫態計算機可讀存儲介質,所述非暫態計算機可讀存儲介質存儲計算機指令,所述計算機指令使所述計算機執行所述的宏圖一號分布式車輪編隊insar衛星高程反演方法的步驟。
33、與現有技術相比,本發明的有益效果在于:
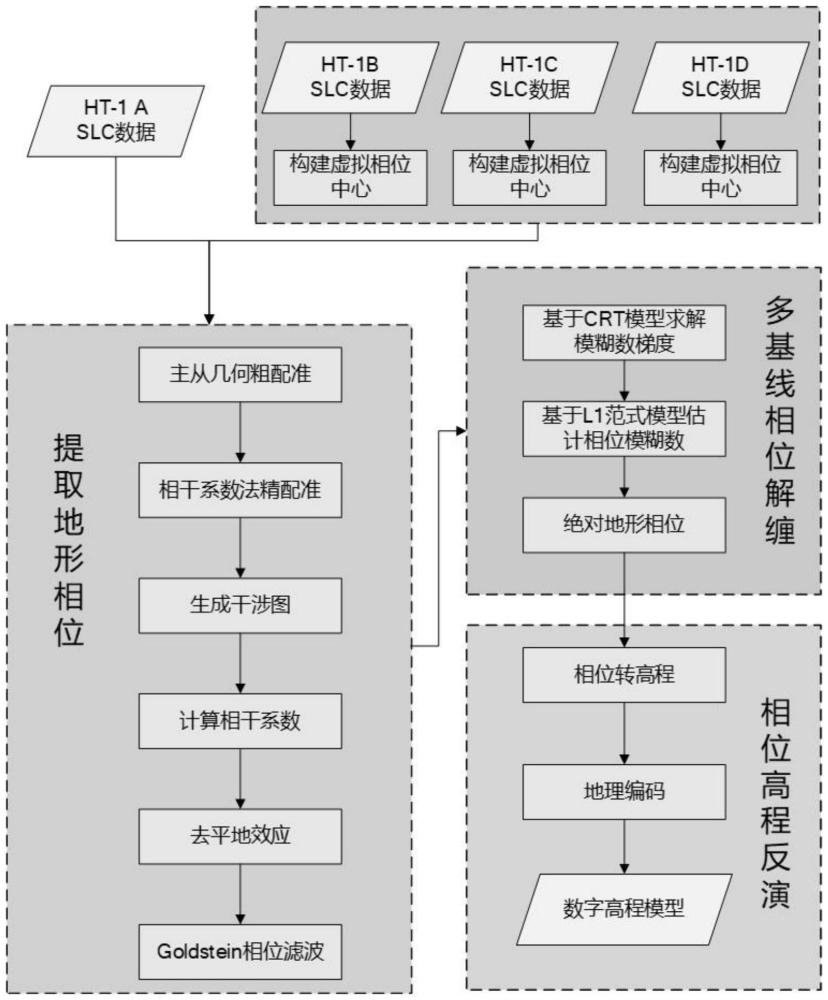
34、本發明公開了一種宏圖一號分布式車輪編隊insar衛星高程反演方法,能夠有效提高復雜地形的數字高程模型(dem)高程反演精度。該方法首先建立等效相位中心,將輔星原收發分置的雙基成像幾何模型簡化為自發自收的單基多航過insar幾何模型;隨后基于單基多航過insar幾何模型配準主輔影像,生成三張不同基線長度的主輔像對干涉圖,并結合軌道信息等參數進行去平地相位處理;對去平地相位后的干涉圖進行多基線相位解纏,恢復絕對地形相位;最終,將解纏后的相位轉換為目標場景高程,經過地理編碼處理后,生成目標區域dem。
技術特征:
1.宏圖一號分布式車輪編隊insar衛星高程反演方法,其特征在于,包括:
2.根據權利要求1所述宏圖一號分布式車輪編隊insar衛星高程反演方法,其特征在于,通過建立等效相位中心,改正輔衛星成像幾何模型,包括:
3.根據權利要求1所述宏圖一號分布式車輪編隊insar衛星高程反演方法,其特征在于,基于改正的輔衛星成像幾何模型配準主輔影像,包括:
4.根據權利要求3所述宏圖一號分布式車輪編隊insar衛星高程反演方法,其特征在于,在完成主輔影像配準后,還包括:
5.根據權利要求1所述宏圖一號分布式車輪編隊insar衛星高程反演方法,其特征在于,對去平地相位后的干涉圖進行多基線相位解纏,恢復絕對地形相位,包括:
6.根據權利要求5所述宏圖一號分布式車輪編隊insar衛星高程反演方法,其特征在于,在地面點p=1時,將lp最小范數優化模型的求解問題轉換為線性最小化問題;在地面點p=2時,將lp最小范數優化模型的求解問題轉換為加權最小二乘問題。
7.根據權利要求1所述宏圖一號分布式車輪編隊insar衛星高程反演方法,其特征在于,將解纏后的相位轉換為目標場景高程,經過地理編碼處理后,生成目標區域dem,包括:
8.宏圖一號分布式車輪編隊insar衛星高程反演設備,其特征在于,包括:
9.一種宏圖一號分布式車輪編隊insar衛星高程反演設備,其特征在于,包括存儲器和處理器,所述存儲器存儲有被所述處理器執行的程序指令,所述處理器調用所述程序指令,以執行權利要求1至7任一項權利要求所述的宏圖一號分布式車輪編隊insar衛星高程反演方法的步驟。
10.一種非暫態計算機可讀存儲介質,其特征在于,所述非暫態計算機可讀存儲介質存儲計算機指令,所述計算機指令使所述計算機執行權利要求1至7中任一項權利要求所述的宏圖一號分布式車輪編隊insar衛星高程反演方法的步驟。
技術總結
本發明屬于合成孔徑雷達干涉測量領域,公開了一種宏圖一號分布式車輪編隊InSAR衛星高程反演方法,能夠有效提高復雜地形的數字高程模型(DEM)高程反演精度。該方法首先,建立等效相位中心,將輔星原收發分置的雙基成像幾何模型簡化為自發自收的單基多航過InSAR幾何模型;隨后基于單基多航過InSAR幾何模型配準主輔影像,生成三張不同基線長度的主輔像對干涉圖,并結合軌道信息等參數進行去平地相位處理;對去平地相位后的干涉圖進行多基線相位解纏,恢復絕對地形相位;最終,將解纏后的相位轉換為目標場景高程,經過地理編碼處理后,生成目標區域DEM。
技術研發人員:趙雙明,朱澤堯,張文,孟令奎,李林宜
受保護的技術使用者:武漢大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!