跌落式熔斷器狀態監測系統、方法、裝置、介質及設備與流程
本技術涉及一種跌落式熔斷器狀態監測系統、方法、裝置、介質及設備,屬于智能電網領域。
背景技術:
1、在電力系統中,高壓跌落式熔斷器是一種重要的保護設備,用于在電路發生過載或短路時自動斷開,防止設備損壞和事故發生。為了實時監測熔斷器的分合狀態,通常會在熔斷器上安裝狀態采集模塊,通過無線姿態識別傳感器檢測熔斷器的動作狀態。
2、由于環境干擾(如風振、機械振動等),現有系統容易將非熔斷器動作誤判為分合閘操作,導致誤報率居高不下。這種誤報不僅降低了監測系統的準確性,還可能引發不必要的維護操作或誤判故障,從而影響電力系統的穩定運行。
技術實現思路
1、有鑒于此,本技術提供了一種跌落式熔斷器狀態監測系統、方法、裝置、介質及設備,本技術實施例既能及時捕捉熔斷器動作,又能避免資源浪費和誤判。
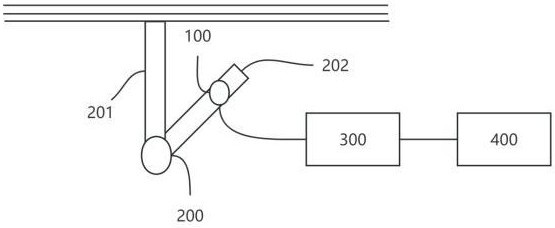
2、本技術實施例第一方面公開了一種跌落式熔斷器狀態監測系統,所述系統包括重力加速度傳感器、處理單元以及通信終端;
3、至少兩個所述重力加速度傳感器被配置為采集跌落式熔斷器的加速度變化量和重力分量,所述加速度變化量和所述重力分量被依次采集;當任一所述加速度變化量超過預設閾值時,生成中斷請求;
4、所述處理單元被配置為接收所述中斷請求,獲取所有所述重力加速度傳感器的重力分量并進行一致性校驗;若所有所述重力加速度傳感器的重力分量一致,則將所述跌落式熔斷器的分合狀態信息發送至所述通信終端;若所有所述重力加速度傳感器的重力分量不一致,則重啟所有所述重力加速度傳感器。
5、進一步地,所述獲取所有所述重力加速度傳感器的重力分量并進行一致性校驗,包括:
6、基于兩兩所述重力加速度傳感器,計算相應采樣點的三維重力分量差值;
7、將所述三維重力分量差值與設定范圍進行比較;
8、若所述三維重力分量差值落入所述設定范圍,則輸出特征值;
9、若所述特征值的數量滿足設定閾值,則通過一致性校驗。
10、進一步地,所述基于兩兩所述重力加速度傳感器,計算相應采樣點的三維重力分量差值之前,還包括:
11、通過診斷信號接收所有所述重力加速度傳感器的反饋信號;
12、基于所述反饋信號判斷所有所述重力加速度傳感器是否屬于同一跌落式熔斷器;
13、若是,則獲取每個所述重力加速度傳感器在窗口內的多個采樣點的三維重力分量。
14、進一步地,還包括:
15、所述處理單元被配置為根據跌落式熔斷器經驗動作時間的第一時間段,采用當前預設采樣頻率進行采樣;
16、所述處理單元被配置為根據所述跌落式熔斷器經驗動作時間的第二時間段,采用指數增加算法調整所述當前預設采樣頻率以采樣,所述第一時間段和所述第二時間段相鄰且所述第一時間段在前。
17、進一步地,所述采用指數增加算法調整所述當前預設采樣頻率,如下式:其中,表示更新采樣頻率,表示當前預設采樣頻率,表示增長系數,表示第二時間段。進一步地,還包括視覺飛行機器人,當所有重力加速度傳感器在重啟后的一致性校驗依然不通過時,所述視覺飛行機器人被配置為:
18、根據gps和慣性測量單元數據,確定所述視覺飛行機器人的當前位置;
19、根據相應熔斷器的預設位置,規劃飛行路徑;
20、通過視覺傳感器實時調整飛行姿態,確保所述相應熔斷器位于攝像頭視野中心;
21、啟動圖像采集和閉合狀態識別流程,所述閉合狀態識別流程基于訓練好的神經網絡模型進行。
22、本技術實施例第二方面公開了一種跌落式熔斷器狀態監測方法,應用于微處理單元,所述微處理單元與至少兩個重力加速度傳感器連接,至少兩個所述重力加速度傳感器被配置為采集跌落式熔斷器的加速度變化量和重力分量,所述加速度變化量和所述重力分量被依次采集;當任一所述加速度變化量超過預設閾值時,生成中斷請求;
23、所述方法包括:
24、接收所述中斷請求;
25、獲取所有所述重力加速度傳感器的重力分量并進行一致性校驗;
26、若所有所述重力加速度傳感器的重力分量一致,則將所述跌落式熔斷器的分合狀態信息發送至通信終端;
27、若所有所述重力加速度傳感器的重力分量不一致,則重啟所有所述重力加速度傳感器。
28、本技術實施例第三方面公開了一種跌落式熔斷器狀態監測裝置,應用于微處理單元,所述微處理單元與至少兩個重力加速度傳感器連接,至少兩個所述重力加速度傳感器被配置為采集跌落式熔斷器的加速度變化量和重力分量,所述加速度變化量和所述重力分量被依次采集;當任一所述加速度變化量超過預設閾值時,生成中斷請求;
29、所述裝置包括:
30、接收模塊,用于接收所述中斷請求;
31、獲取模塊,用于獲取所有所述重力加速度傳感器的重力分量并進行一致性校驗;
32、第一判斷模塊,用于若所有所述重力加速度傳感器的重力分量一致,則將所述跌落式熔斷器的分合狀態信息發送至通信終端;
33、第二判斷模塊,用于若所有所述重力加速度傳感器的重力分量不一致,則重啟所有所述重力加速度傳感器。
34、本技術實施例第四方面公開了一種計算機可讀存儲介質,所述計算機可讀存儲介質包括存儲的程序,其中,在所述程序運行時控制所在設備的處理器中執行上述實施例的跌落式熔斷器狀態監測方法。
35、本技術實施例第五方面公開了一種電子設備,所述電子設備包括:一個或多個處理器;存儲裝置,用于存儲一個或多個程序;當所述一個或多個程序被所述一個或多個處理器執行,使得所述一個或多個處理器執行上述實施例的跌落式熔斷器狀態監測方法。
36、與現有技術相比,本技術實施例具有如下有益效果:
37、本技術實施例提供了一種跌落式熔斷器狀態監測系統、方法、裝置、介質及設備。高壓跌落式熔斷器狀態監測系統包括重力加速度傳感器、處理單元以及通信終端;至少兩個所述重力加速度傳感器被配置為采集跌落式熔斷器的加速度變化量和重力分量,所述加速度變化量和所述重力分量被依次采集;當任一所述加速度變化量超過預設閾值時,生成中斷請求;所述處理單元被配置為接收所述中斷請求,獲取所有所述重力加速度傳感器的重力分量并進行一致性校驗;若所有所述重力加速度傳感器的重力分量一致,則將所述跌落式熔斷器的分合狀態信息發送至所述通信終端;若所有所述重力加速度傳感器的重力分量不一致,則重啟所有所述重力加速度傳感器。
38、本實施例通過至少兩個重力加速度傳感器分別采集加速度變化量和重力分量,并將兩種數據進行結合判斷。當加速度變化量超過預設閾值時,系統生成中斷請求,觸發處理單元對所有傳感器的重力分量進行一致性校驗。若重力分量一致,則確認熔斷器動作有效,發送分合狀態信息至通信終端;若重力分量不一致,則判定數據異常,自動重啟所有傳感器。這一設計通過將加速度變化量與重力分量兩種數據進行協同校驗,解決了單一傳感器易受環境干擾導致誤報的問題,同時確保了動作檢測的準確性。中斷觸發機制提高了系統的實時性,自動重啟機制增強了系統的容錯能力。因此,該系統顯著降低了誤報率和漏報率,延長了使用壽命,適用于復雜電力環境。
39、值得注意的是,如果僅依賴重力分量判斷狀態,系統需要持續高頻采集數據,這會占用大量計算和通信資源。通過加速度閾值,系統平時可處于低功耗狀態,僅當檢測到異常加速度變化時,才激活處理單元進行重力分量校驗,大幅減少資源浪費。
- 還沒有人留言評論。精彩留言會獲得點贊!