機(jī)器人回樁充電的控制方法、設(shè)備及可讀存儲介質(zhì)與流程
本技術(shù)涉及機(jī)器人,尤其涉及機(jī)器人回樁充電的控制方法、設(shè)備及可讀存儲介質(zhì)。
背景技術(shù):
1、在機(jī)器人定位對接充電樁的過程中,通過預(yù)先繪制的地圖引導(dǎo)機(jī)器人快速接近充電樁的大致位置,但機(jī)器人與充電樁需要精準(zhǔn)對齊后,才能進(jìn)行充電。
2、目前,大部分機(jī)器人采用的是攝像頭進(jìn)行視覺導(dǎo)航、攝像頭視覺和激光雷達(dá)結(jié)合導(dǎo)航或激光雷達(dá)導(dǎo)航,以嘗試對準(zhǔn)充電樁的中線,然而,激光雷達(dá)掃描充電樁輪廓分辨率低,而攝像頭雖然能提供高分辨率環(huán)境圖像,但無法兼顧近距離盲區(qū),導(dǎo)致盲區(qū)圖像模糊。因此,在機(jī)器人對正充電樁的接觸極片時,由于傳感器本身的分辨率和測量誤差等因素,尤其是當(dāng)需要修正接觸極片對正的微小偏移時,無法達(dá)到所需的精度水平,導(dǎo)致需要進(jìn)行多次調(diào)整才能成功對準(zhǔn)充電樁,增加了對接時間,進(jìn)而影響了機(jī)器人進(jìn)行回樁充電的效率。
3、上述內(nèi)容僅用于輔助理解本技術(shù)的技術(shù)方案,并不代表承認(rèn)上述內(nèi)容是現(xiàn)有技術(shù)。
技術(shù)實(shí)現(xiàn)思路
1、本技術(shù)的主要目的在于提供一種機(jī)器人回樁充電的控制方法、設(shè)備及可讀存儲介質(zhì),旨在解決如何提高機(jī)器人回樁充電的效率的技術(shù)問題。
2、為實(shí)現(xiàn)上述目的,本技術(shù)提出一種機(jī)器人回樁充電的控制方法,應(yīng)用于機(jī)器人,所述機(jī)器人包括機(jī)器人電極片,所述機(jī)器人電極片用于接觸充電樁電極片以進(jìn)行充電,所述的機(jī)器人回樁充電的控制方法包括:
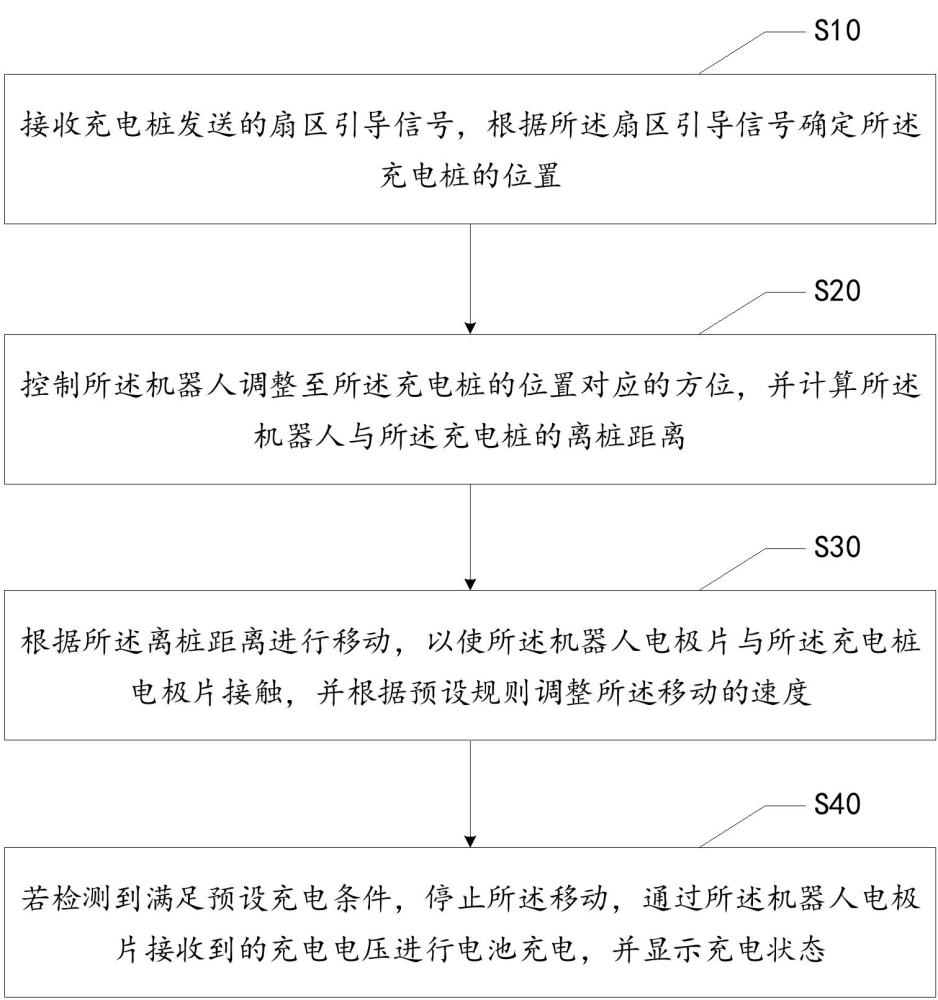
3、接收充電樁發(fā)送的扇區(qū)引導(dǎo)信號,根據(jù)所述扇區(qū)引導(dǎo)信號確定所述充電樁的位置;
4、控制所述機(jī)器人調(diào)整至所述充電樁的位置對應(yīng)的方位,并計(jì)算所述機(jī)器人與所述充電樁的離樁距離;
5、根據(jù)所述離樁距離進(jìn)行移動,以使所述機(jī)器人電極片與所述充電樁電極片接觸,并根據(jù)預(yù)設(shè)規(guī)則調(diào)整所述移動的速度;
6、若檢測到滿足預(yù)設(shè)充電條件,停止所述移動,通過所述機(jī)器人電極片接收到的充電電壓進(jìn)行電池充電,并顯示充電狀態(tài)。
7、在一實(shí)施例中,所述若檢測到滿足預(yù)設(shè)充電條件,停止所述移動,通過所述機(jī)器人電極片接收到的充電電壓進(jìn)行電池充電,并顯示充電狀態(tài)的步驟包括:
8、若檢測到所述機(jī)器人電極片接收到充電電壓,停止所述移動,進(jìn)行電池充電并顯示充電狀態(tài);
9、若接收到所述充電樁發(fā)送的到樁信號,停止所述移動,進(jìn)行電池充電并顯示充電狀態(tài);
10、若達(dá)到移動超時距離,停止所述移動,判斷回樁失敗,并重新執(zhí)行所述控制所述機(jī)器人調(diào)整至所述充電樁的位置對應(yīng)的方位,并計(jì)算所述機(jī)器人與所述充電樁的離樁距離的步驟。
11、在一實(shí)施例中,所述若檢測到滿足預(yù)設(shè)充電條件,停止所述移動,通過所述機(jī)器人電極片接收到的充電電壓進(jìn)行電池充電,并顯示充電狀態(tài)的步驟還包括:
12、若檢測到滿足預(yù)設(shè)充電條件,停止所述移動,并驗(yàn)證所述機(jī)器人電極片是否接收到充電電壓;
13、若接收到充電電壓,則開啟接口防護(hù),進(jìn)行電池充電并顯示充電狀態(tài);
14、若未接收到充電電壓,則判斷所述機(jī)器人充電失敗,重新執(zhí)行所述控制所述機(jī)器人調(diào)整至所述充電樁的位置對應(yīng)的方位,并計(jì)算所述機(jī)器人與所述充電樁的離樁距離的步驟。
15、在一實(shí)施例中,所述的機(jī)器人回樁充電的控制方法還包括:
16、若所述機(jī)器人處于關(guān)機(jī)狀態(tài),檢測到所述充電樁的用于喚醒的供電信號時,打開系統(tǒng)電源并保持通電狀態(tài);
17、若檢測到所述機(jī)器人電極片接收到充電電壓,啟動燈光以指示用戶停止手動移動,通過所述機(jī)器人電極片接收到的充電電壓進(jìn)行電池充電,并顯示充電狀態(tài)。
18、在一實(shí)施例中,所述機(jī)器人還包括機(jī)器人紅外模組,所述機(jī)器人紅外模組用于與充電樁紅外模組通信;
19、所述接收充電樁發(fā)送的扇區(qū)引導(dǎo)信號,根據(jù)所述扇區(qū)引導(dǎo)信號確定相對于所述充電樁的方位的步驟包括:
20、通過所述機(jī)器人紅外模組接收所述充電樁發(fā)送的所述扇區(qū)引導(dǎo)信號;
21、解析所述扇區(qū)引導(dǎo)信號,根據(jù)所述充電樁預(yù)設(shè)的光場發(fā)射角,以及不同光場的數(shù)字編碼,計(jì)算所述充電樁到所述機(jī)器人的方位角,確定所述充電樁的位置。
22、此外,為實(shí)現(xiàn)上述目的,本技術(shù)還提出一種機(jī)器人回樁充電的控制方法,應(yīng)用于充電樁,所述充電樁包括充電樁電極片、萬向輪引導(dǎo)槽、紅外信號發(fā)射器以及充電樁紅外模組,所述充電樁電極片用于接觸機(jī)器人電極片以進(jìn)行充電,所述萬向輪引導(dǎo)槽用于輔助機(jī)器人移動,所述紅外信號發(fā)射器用于發(fā)射紅外信號光場以引導(dǎo)所述機(jī)器人對正,所述充電樁紅外模組用于與機(jī)器人紅外模組通信,所述的機(jī)器人回樁充電的控制方法包括:
23、通過所述紅外信號發(fā)射器發(fā)送扇區(qū)引導(dǎo)信號到所述機(jī)器人,以引導(dǎo)所述機(jī)器人確定所述充電樁位置,并通過所述萬向輪引導(dǎo)槽輔助所述機(jī)器人進(jìn)行移動;
24、判斷所述充電樁電極片與所述機(jī)器人電極片接觸,確定所述機(jī)器人到樁;
25、通過所述充電樁紅外模組發(fā)送到樁信號到機(jī)器人端,通過所述充電樁電極片輸送電壓到所述機(jī)器人,并顯示充電狀態(tài)。
26、在一實(shí)施例中,所述通過所述紅外信號發(fā)射器發(fā)送引導(dǎo)信號到所述機(jī)器人,以引導(dǎo)所述機(jī)器人確定所述充電樁位置,并通過所述萬向輪引導(dǎo)槽輔助所述機(jī)器人進(jìn)行移動的步驟包括:
27、通過所述紅外信號發(fā)射器發(fā)射至少一種編碼的紅外信號,形成對應(yīng)的紅外信號光場;
28、根據(jù)所述紅外信號光場的所述紅外信號的編碼生成引導(dǎo)信號,以引導(dǎo)所述機(jī)器人根據(jù)所述紅外信號的編碼確定所述充電樁位置;
29、通過所述萬向輪引導(dǎo)槽輔助所述機(jī)器人在預(yù)設(shè)充電區(qū)域內(nèi)進(jìn)行移動。
30、在一實(shí)施例中,所述充電樁還包括充電樁極片阻抗檢測電路和行程觸發(fā)開關(guān),用于識別所述機(jī)器人上樁情況;
31、所述判斷所述充電樁電極片與所述機(jī)器人電極片接觸,確定所述機(jī)器人到樁的步驟包括:
32、通過所述充電樁極片阻抗檢測電路識別所述機(jī)器人電極片的等效阻抗,確定所述充電樁電極片與所述機(jī)器人電極片接觸;
33、檢測到所述行程觸發(fā)開關(guān)被觸發(fā),確定所述充電樁電極片與所述機(jī)器人電極片接觸到位,即確定所述機(jī)器人已上樁。
34、此外,為實(shí)現(xiàn)上述目的,本技術(shù)還提出一種機(jī)器人回樁充電的控制設(shè)備,所述設(shè)備包括:存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運(yùn)行的計(jì)算機(jī)程序,所述計(jì)算機(jī)程序配置為實(shí)現(xiàn)如上文所述的機(jī)器人回樁充電的控制方法的步驟。
35、此外,為實(shí)現(xiàn)上述目的,本技術(shù)還提出一種存儲介質(zhì),所述存儲介質(zhì)為計(jì)算機(jī)可讀存儲介質(zhì),所述存儲介質(zhì)上存儲有計(jì)算機(jī)程序,所述計(jì)算機(jī)程序被處理器執(zhí)行時實(shí)現(xiàn)如上文所述的機(jī)器人回樁充電的控制方法的步驟。
36、本技術(shù)提供了一種機(jī)器人回樁充電的控制方法,本技術(shù)首先通過接收充電樁發(fā)送的扇區(qū)引導(dǎo)信號,根據(jù)扇區(qū)引導(dǎo)信號確定充電樁的位置;控制機(jī)器人調(diào)整至充電樁的位置對應(yīng)的方位,并計(jì)算機(jī)器人與充電樁的離樁距離;根據(jù)離樁距離進(jìn)行移動,以使機(jī)器人電極片與充電樁電極片接觸,并根據(jù)預(yù)設(shè)規(guī)則調(diào)整移動的速度;若檢測到滿足預(yù)設(shè)充電條件,停止移動,通過機(jī)器人電極片接收到的充電電壓進(jìn)行電池充電,并顯示充電狀態(tài)。通過接收充電樁發(fā)送的引導(dǎo)信號,準(zhǔn)確地確定充電樁的位置,并迅速調(diào)整方位,通過計(jì)算與充電樁的離樁距離,確保在移動過程中能夠高效準(zhǔn)確的接近充電樁,根據(jù)離樁距離和預(yù)設(shè)規(guī)則調(diào)整移動速度,提高了對接的成功率,還減少了因速度過快而導(dǎo)致的碰撞風(fēng)險(xiǎn),在充電過程中,通過實(shí)時監(jiān)測充電電壓,確保充電過程的安全性,并顯示充電狀態(tài)。本技術(shù)達(dá)成了提高機(jī)器人回樁充電的效率的技術(shù)效果。
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!