自移動工作設備的制作方法
本申請涉及機器人,具體涉及一種自移動工作設備。
背景技術:
1、自移動工作設備,如智能割草機等,需要在指定的邊界內工作移動,在移動的同時,需要規劃最優的工作路徑,從而減少工作時間,提高工作效率。但傳統技術中自移動工作設備受到的其他器件的電磁波干擾較多,無法準確定位自移動工作設備當前的位置點,從而導致無法進行路徑規劃,或者規劃的路徑并不符合自移動工作設備的實際工作狀況。因此,如何設計自移動工作設備的定位天線模組,減少周圍環境中的電磁波干擾,提高定位準確性,成為需要解決的技術問題。
技術實現思路
1、本申請的主要目的在于提出一種自移動工作設備,以解決現有自移動工作設備周圍環境中的其他器件的電磁波干擾較多,無法準確定位自移動工作設備當前的位置點的技術問題。
2、為實現上述目的,本申請實施例提供的一種自移動工作設備,所述自移動工作設備包括:
3、設備主體;
4、工作單元,所述工作單元設于所述設備主體的底部,用于執行預設的工作任務;
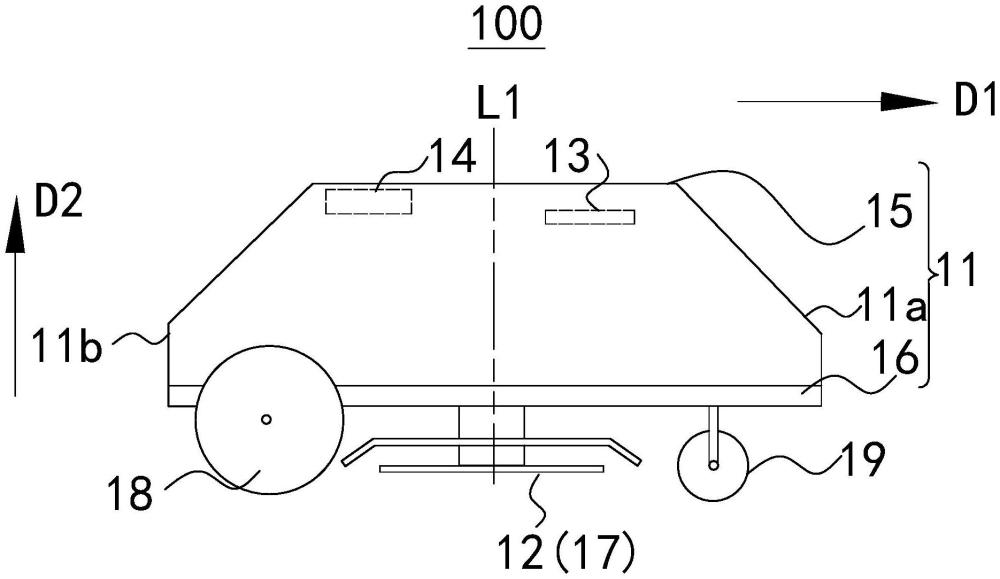
5、主控電路板,所述主控電路板設于所述設備主體內,在所述自移動工作設備的行進方向上,所述設備主體具有相對的前端與后端,所述主控電路板位于靠近所述設備主體的前端;
6、定位模組,所述定位模組設于所述設備主體內,所述定位模組位于靠近所述設備主體的后端且與所述主控電路板電連接,用于收發定位信號以獲取所述自移動工作設備的位置信息。
7、本申請提供的一種自移動工作設備,所述自移動工作設備包括設備主體、工作單元、主控電路板、定位模組,所述工作單元設于所述設備主體的底部,用于執行預設的工作任務,所述主控電路板設于所述設備主體內,在所述自移動工作設備的行進方向上,所述設備主體具有相對的前端與后端,所述定位模組設于所述設備主體內,所述定位模組用于實時獲取所述自移動工作設備的定位信號,以規劃自移動工作設備的路徑,或監測所述自移動工作設備是否按照預設規劃路徑行走,而在所述定位模組收發定位信號的過程中,容易受到周圍環境中的其他器件的電磁波信號的干擾,導致定位信號不準確,進而導致自移動工作設備的路徑規劃異常或未按照預設規劃路徑行走的問題,基于此,本申請提出將所述主控電路板位于靠近所述設備主體的前端,所述定位模組位于靠近所述設備主體的后端,所述定位模組與所述主控電路板分開設置,所述定位模組且與所述主控電路板電連接,用于收發定位信號以獲取所述自移動工作設備的位置信息,相較于將定位模組設于主控電路板上或附近,可極大地減少主控電路板上其他電子器件對于定位模組收發定位信號的干擾,提高自移動工作設備定位的準確性。
8、在一種可選的實施方式中,所述定位模組與所述主控電路板在所述設備主體的高度方向上錯位設置。
9、在一種可選的實施方式中,所述定位模組設于靠近所述設備主體頂部的位置。
10、在一種可選的實施方式中,所述設備主體包括沿高度方向依次裝配的頂蓋、中殼及底盤,所述主控電路板設于所述中殼與所述底盤之間的收容腔中,所述中殼的部分與所述頂蓋的部分相貼合,所述中殼設有開口朝向所述頂蓋的收容槽,所述定位模組安裝于所述收容槽內。
11、在一種可選的實施方式中,所述收容槽的周壁上設有屏蔽層,所述屏蔽層用于屏蔽所述主控電路板的信號。
12、在一種可選的實施方式中,所述定位模組包括天線外殼、定位天線、天線電路板,所述天線外殼包括沿所述設備主體的高度方向相對接的天線頂殼及天線底殼,所述天線頂殼與所述設備主體頂部相鄰或相貼合,所述天線電路板設于所述天線底殼,所述定位天線設于所述天線頂殼與所述天線電路板之間,且電連接所述天線電路板。
13、在一種可選的實施方式中,所述天線電路板還設有天線接頭,所述天線外殼上設有通孔,所述天線接頭經所述通孔伸出;所述自移動工作設備還包括電連接線,所述電連接線的一端電連接所述天線接頭,所述電連接線的另一端所述主控電路板電連接。
14、在一種可選的實施方式中,所述自移動工作設備還包括驅動板,所述驅動板設置在所述設備主體內且與所述主控電路板電連接,所述驅動板位于靠近所述設備主體的前端區域。
15、在一種可選的實施方式中,所述驅動板與所述定位模組在高度方向上錯位設置且位于所述主控電路板的正下方。
16、在一種可選的實施方式中,所述自移動工作設備還包括視覺檢測電路板,所述視覺檢測電路板設置在所述設備主體內且與所述主控電路板電連接,所述視覺檢測電路板位于靠近所述設備主體的前端區域。
技術特征:
1.一種自移動工作設備,其特征在于,所述自移動工作設備包括:
2.根據權利要求1所述的自移動工作設備,其特征在于,所述定位模組與所述主控電路板在所述設備主體的高度方向上錯位設置。
3.根據權利要求2所述的自移動工作設備,其特征在于,所述定位模組設于靠近所述設備主體頂部的位置。
4.根據權利要求1所述的自移動工作設備,其特征在于,
5.根據權利要求4所述的自移動工作設備,其特征在于,
6.根據權利要求1所述的自移動工作設備,其特征在于,
7.根據權利要求6所述的自移動工作設備,其特征在于,
8.根據權利要求1至7任一項所述的自移動工作設備,其特征在于,
9.根據權利要求8所述的自移動工作設備,其特征在于,
10.根據權利要求1所述的自移動工作設備,其特征在于,
技術總結
本申請涉及機器人領域,具體涉及一種自移動工作設備,自移動工作設備包括設備主體、工作單元、主控電路板、定位模組,工作單元設于設備主體的底部,用于執行預設的工作任務,主控電路板設于設備主體內,在自移動工作設備的行進方向上,設備主體具有相對的前端與后端,定位模組設于設備主體內,定位模組用于實時獲取自移動工作設備的定位信號,將定位模組與主控電路板在行進方向上錯位設置,可極大地減少主控電路板上電子器件對于定位模組收發定位信號的干擾,提高自移動工作設備定位的準確性。
技術研發人員:魏基棟,徐遠俊
受保護的技術使用者:深圳庫犸科技有限公司
技術研發日:20240722
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!