一種基于動態反饋控制的轉體橋姿態監控系統的制作方法
本技術涉及橋梁施工,更具體地說,涉及一種基于動態反饋控制的轉體橋姿態監控系統。
背景技術:
1、轉體橋作為一種重要的工程結構,廣泛應用于港口、航道、城市交通等領域,具有在特定時刻旋轉開啟、通過大型船舶或車輛的獨特功能。隨著現代化交通需求的提升和橋梁規模的不斷增大,轉體橋的姿態控制與監測技術愈發顯得至關重要。當前,傳統的轉體橋姿態控制系統普遍依賴于機械設備的硬性調節和人工干預,難以應對復雜的外部環境變化及內部工作條件,導致系統穩定性較差,事故發生頻率較高。此外,橋梁在轉體過程中面臨復雜的力學作用,如結構應力、溫度變化、風荷載等因素,這些都對橋梁的穩定性與精度提出了更高要求。
2、現有的橋梁姿態監控系統多依賴單一傳感器數據進行分析,缺乏有效的數據融合和實時處理機制,導致數據傳輸延遲,監測精度和實時性難以保障。雖然一些研究提出了多種優化方案,如引入智能控制和預測模型,但由于轉體橋的復雜性和多變的環境因素,現有技術仍難以實現精準、動態、自適應的姿態控制與監測。
3、為了確保轉體橋在運作過程中的安全性與精確性,如何在復雜的外部環境下,結合傳感器數據、邊緣計算和先進控制算法進行實時監控與反饋控制,已經成為亟需解決的技術問題。
技術實現思路
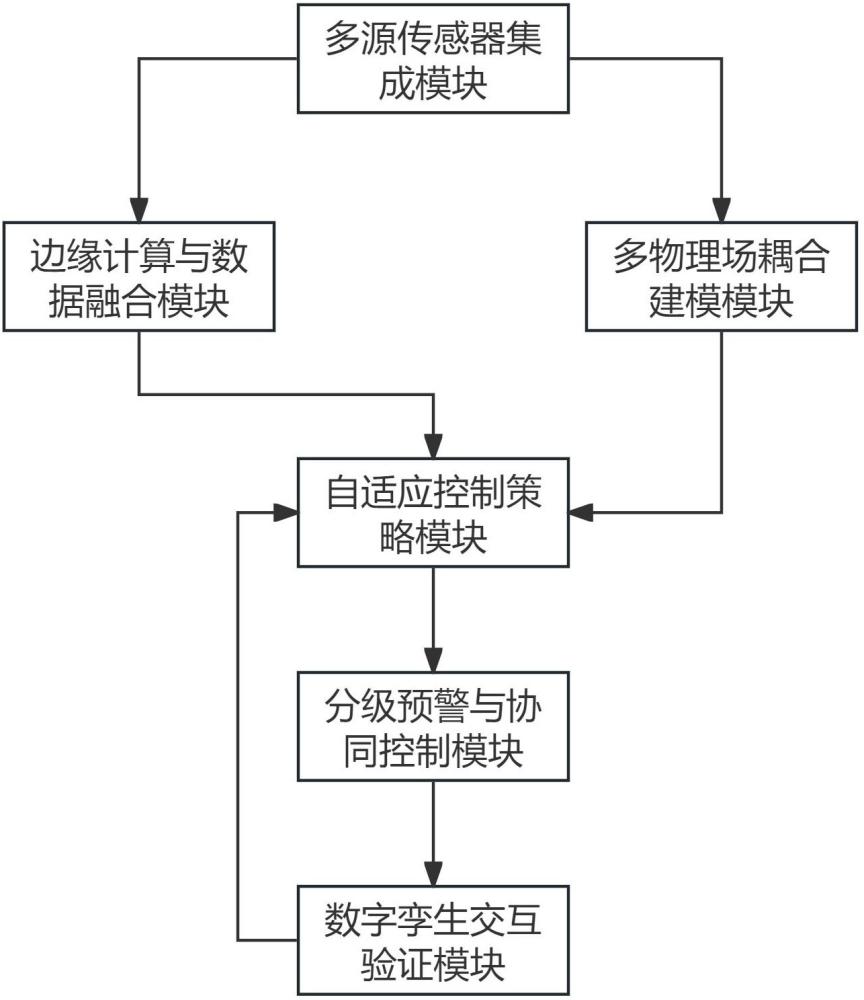
1、為了克服現有技術存在的一系列缺陷,本技術的目的在于針對上述問題,提供一種基于動態反饋控制的轉體橋姿態監控系統,包括以下模塊。
2、多源傳感器集成模塊,集成多類型傳感設備,構建全方位姿態監測網絡,實現橋梁關鍵部位的高精度實時監測。
3、邊緣計算與數據融合模塊,利用現場部署的邊緣計算節點和多尺度卡爾曼濾波算法,實現傳感器數據的實時就地處理與融合,有效降低數據傳輸延遲并提高監測穩定性。
4、多物理場耦合建模模塊,構建包含結構力學、溫度場、接觸摩擦和流體作用的多物理場耦合模型,實現對轉體橋姿態變化的精準預測。
5、自適應控制策略模塊,基于實時監測數據,結合模型預測控制、參數自適應和強化學習技術,動態優化控制參數,實現對轉體橋姿態的高精度自適應控制。
6、分級預警與協同控制模塊,通過建立多級預警機制和預警-控制映射矩陣,自動匹配相應控制策略,實現風險分級響應和智能協同控制。
7、數字孿生交互驗證模塊,構建轉體橋的高精度數字孿生模型,通過虛實雙向數據交互與實時對比分析,實現控制策略的虛擬驗證和動態仿真。
8、進一步的,多源傳感器集成模塊包括以下組件。
9、多類型傳感器單元,集成gnss/rtk、三軸加速度計、傾角傳感器、位移傳感器、光纖光柵和應變片,實現對橋梁位移、角度、加速度及應變的全面監測。
10、高精度時間同步單元,采用ptp/ieee?1588精確時間協議及分布式時鐘同步技術,確保不同位置傳感器數據的時間戳精確統一。
11、能源管理單元,結合智能電源管理,確保傳感器網絡在惡劣環境下長期穩定運行。
12、網絡通信與冗余備份單元,采用有線與無線混合通信方式,實現工業級網絡傳輸可靠性,并通過通信路徑冗余設計確保數據傳輸的連續性。
13、傳感器硬件自診斷單元,實現傳感器硬件狀態實時監測與周期性自校準,并自動識別硬件級物理故障情況,保障采集數據源的可靠性。
14、環境適應性保護單元,為各類傳感器提供防水、防塵、抗震、抗電磁干擾和溫度補償保護措施,確保在惡劣環境下的穩定工作。
15、傳感器布局優化單元,確定橋梁關鍵部位的最優傳感器布局方案,實現用最少的傳感器獲取最全面的結構信息。
16、進一步的,多類型傳感器單元中的gnss/rtk定位精度優于1厘米,三軸加速度計量程為±16g且靈敏度不低于0.001g,傾角傳感器測量范圍為±90°且精度優于0.01°,位移傳感器測量范圍為0-500毫米且精度優于0.1毫米,光纖光柵應變傳感器測量精度優于1微應變。
17、進一步的,邊緣計算與數據融合模塊包括以下組件。
18、分布式邊緣計算單元,部署于橋梁關鍵監測區域,實現傳感數據的就地處理。
19、數據預處理與噪聲濾波單元,基于多尺度卡爾曼濾波算法,處理傳感器原始數據中的噪聲問題,提高單源信號質量。
20、數據質量評估單元,通過統計學習和模式識別方法,自動識別并修復傳感器數據中的數據層面的異常值、缺失值和突變值,確保數據融合的可靠性。
21、計算資源動態調度單元,根據監測任務優先級和實時數據流量,智能分配和調度邊緣計算資源,確保關鍵數據處理的實時性和整體效率。
22、多源數據融合單元,針對不同監測場景動態選擇適合的數據融合算法,實現多源異構數據的綜合分析和信息提取。
23、邊云數據分發單元,建立邊緣節點與云平臺的分層計算架構和數據傳輸機制,輕量級實時任務在邊緣完成,復雜分析任務推送至云端。
24、數據壓縮與傳輸優化單元,采用上下文感知壓縮算法,根據數據重要性和帶寬狀況動態調整壓縮比例,在保證監測精度的前提下優化數據傳輸效率。
25、進一步的,多物理場耦合建模模塊包括以下組件。
26、結構力學建模單元,建立轉體橋的精細化有限元模型,計算各類載荷作用下的應力分布和結構變形。
27、溫度場耦合單元,模擬陽光輻射、環境溫度變化對橋梁各部件的非均勻熱膨脹效應,計算熱應力與熱變形對橋梁姿態的影響。
28、接觸摩擦力學單元,精確建模關鍵接觸界面的摩擦特性和磨損狀態,計算摩擦力矩對轉體過程的阻尼效應。
29、流體-結構相互作用單元,模擬風荷載和水流作用對橋梁的動態影響,通過計算流體誘導振動和氣動力學效應預測姿態波動。
30、物理模型邊界條件單元,根據傳感器監測數據持續校準模型的物理邊界約束和荷載條件,確保模型的物理一致性。
31、多尺度計算協同單元,整合宏觀結構響應與微觀材料行為的多尺度分析技術,在保證計算效率的同時提高模型的物理精度。
32、進一步的,溫度場耦合單元被配置為實現:環境溫度監測范圍-40℃至85℃,精度優于±0.5℃;太陽輻射強度監測范圍0-1200w/m2,精度優于±5%;支持24小時溫度場演化預測,預測誤差小于±2.5℃;熱變形計算精度優于實測值的±5%;自動識別溫度梯度超過15℃/m的高風險區域,并給出預警。
33、進一步的,自適應控制策略模塊包括以下組件。
34、預測控制單元,基于多物理場耦合模型預測橋梁未來狀態響應,通過滾動時域優化計算最優控制指令序列,實現對轉體過程的前饋控制。
35、控制參數在線識別單元,利用實時監測數據不斷更新控制相關的動力學參數,捕捉結構特性、摩擦系數和外部荷載的變化。
36、強化學習優化單元,從歷史控制經驗中提取最優策略,適應復雜環境變化和模型不確定性,不斷改進控制效果。
37、控制方案優化單元,平衡轉體精度、能耗、執行時間和安全裕度目標,通過帕累托最優方法生成綜合性能最優的控制方案。
38、魯棒性保障單元,設計對參數擾動和外部干擾具有抗干擾能力的控制律,確保在惡劣環境和部分傳感器失效情況下的控制穩定性。
39、執行機構分配單元,基于橋梁多驅動器的特性和狀態,優化分配控制力,避免執行器過載和結構應力集中。
40、控制策略績效評估單元,對控制策略的實施效果進行實時評估和量化分析,為控制策略的迭代優化提供依據。
41、進一步的,分級預警與協同控制模塊包括以下組件。
42、多維狀態評估單元,綜合分析結構應力、位移、振動和環境條件參數,實時計算橋梁健康狀態指標。
43、預警級別劃分單元,基于橋梁安全標準和歷史數據建立正常、注意、警告、危險和緊急五級預警閾值體系,實現對異常狀態的精準分級。
44、預警-控制映射矩陣單元,建立預警等級與控制策略的動態映射關系,針對不同級別風險自動匹配相應的控制參數和執行方案。
45、多系統協同單元,協調轉體機構、減震系統和鎖定裝置的聯動響應,確保整體系統協同應對不同級別的異常狀況。
46、人機交互確認單元,針對高級別預警事件,提供人工干預和決策確認機制,結合操作人員經驗與自動控制形成雙重保障。
47、應急降級控制單元,在傳感器或控制器局部失效情況下,自動啟動降級運行模式,保持基本控制功能并確保轉體橋安全。
48、預警響應記錄單元,記錄預警事件的觸發條件、系統響應過程和事件處理結果,為后續預警機制改進提供數據支持。
49、進一步的,數字孿生交互驗證模塊包括以下組件。
50、高精度幾何建模單元,基于激光掃描和bim技術構建轉體橋的數字孿生模型,實現物理結構到虛擬模型的精準映射。
51、集成物理環境仿真單元,基于多物理場模型,構建包含力學、熱學、流體的綜合仿真環境,作為虛擬測試和驗證的基礎平臺。
52、物理-虛擬同步單元,通過專用數據接口實現監測數據向虛擬模型的實時映射,保持數字孿生與實體橋梁狀態的動態一致性。
53、控制策略虛擬驗證單元,利用數字孿生環境對控制策略進行預先測試,評估其安全性和有效性,為實際控制方案優化提供建議。
54、虛實差異分析單元,比較數字孿生預測結果與實際監測數據之間的偏差,識別模型缺陷和潛在異常,不斷優化數字孿生模型精度。
55、多場景預演單元,模擬特殊工況下橋梁轉體行為,提前制定應急預案,增強應對復雜情境的能力。
56、可視化交互單元,通過三維可視化界面和增強現實技術直觀展示橋梁狀態和控制過程,支持工程師進行沉浸式分析和決策輔助。
57、進一步的,高精度幾何建模單元構建的數字孿生模型具有以下特性。
58、關鍵部位幾何精度優于±5mm,整體幾何精度優于±20mm。
59、包含不少于300個獨立構件和60個關鍵連接節點。
60、模型總數據量不超過5gb,確保在普通工作站上流暢運行。
61、支持至少3種標準數據交換格式,包括ifc、step和stl。
62、采用參數化建模技術,支持模型快速更新,單參數修改響應時間小于10秒。
63、與bim系統的數據同步延遲小于5分鐘。
64、支持lod200-lod400三級細節層次動態切換,以平衡顯示精度和運行效率。
65、與現有技術相比,本技術具有以下有益效果。
66、本技術基于多源傳感器融合、邊緣計算、多物理場耦合建模和數字孿生技術,構建高精度、實時自適應的轉體橋姿態監控與控制系統,實現高效、精準、安全的橋梁姿態動態調整與智能協同控制。
- 還沒有人留言評論。精彩留言會獲得點贊!