無人機自動控制檢測系統(tǒng)的制作方法
本發(fā)明屬于電子信息,尤其涉及一種無人機自動控制檢測系統(tǒng)。
背景技術(shù):
1、隨著無人機產(chǎn)業(yè)的迅速發(fā)展迅速,無人機將實現(xiàn)大規(guī)模常態(tài)化運營。與其他應(yīng)用領(lǐng)域無人機不同的是,其飛行頻次高且需要較高可靠性。為保證物流無人機本體的高可靠性,需要對無人機自身設(shè)備進行精細化監(jiān)視,及時對物流無人機存在故障或隱患的模塊或部件進行維修、更換。
2、目前,對無人機自身設(shè)備進行監(jiān)視有兩種方式:機載飛控計算機實時對自身設(shè)備進行監(jiān)控,但進行精細化監(jiān)視會占用大量機載計算機資源,以及當新增監(jiān)視點時需升級無人機終端軟件,對于大規(guī)模物流無人機進行軟件升級,增加系統(tǒng)升級迭代的難度;人工分析無人機飛行日志實現(xiàn)對無人機設(shè)備進行監(jiān)視也是比較常見的方法,但無人機飛行頻次高,進而產(chǎn)生的飛行日志也是海量的,由人員對飛行日志進行分析效率很低。
技術(shù)實現(xiàn)思路
1、本發(fā)明提供了一種無人機自動控制檢測系統(tǒng),可以有效解決上述問題。
2、本發(fā)明是這樣實現(xiàn)的:
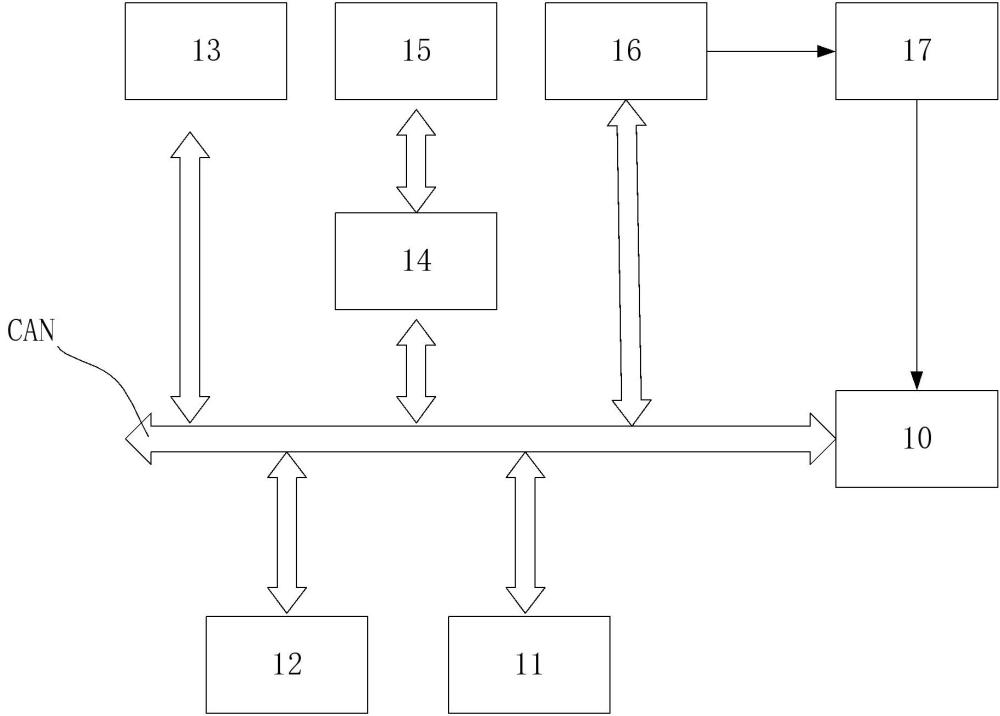
3、一種無人機自動控制檢測系統(tǒng),包括:無人機以及與所述無人機通信連接的地面監(jiān)測平臺;
4、所述無人機包括:
5、飛控模塊;
6、通過?can?總線與所述飛控模塊連接的can?轉(zhuǎn)?pwm/spi/iic/uart模塊;
7、電調(diào)模塊,與所述can?轉(zhuǎn)?pwm/spi/iic/uart模塊上的pwm接口連接;
8、與電調(diào)模塊連接的舵機模塊;
9、電流傳感器,與can?轉(zhuǎn)?pwm/spi/iic/uart模塊上adc接口連接,用于測量所述電調(diào)模塊輸出到所述舵機模塊的電流i;
10、所述飛控模塊通過所述?can?總線獲取所述舵機模塊的電流i,并根據(jù)預(yù)存儲的舵機模塊的信息,將電流ik轉(zhuǎn)化為轉(zhuǎn)速r,其滿足:r=?(ik*u)/(p0*x),?u是電機額定電壓,p0是電機滿載功率,x為電機滿載轉(zhuǎn)速,k為大于等于1的自然數(shù);所述飛控模塊進一步根據(jù)所述轉(zhuǎn)速r和運行時間t推算使用壽命y,將壽命y值的累計值做日志存儲;
11、還包括通信模塊,用于將上述數(shù)據(jù)傳輸給所述地面監(jiān)測平臺以進行實時監(jiān)控。
12、作為進一步改進的,所述無人機自動控制檢測系統(tǒng)還包括通過所述can?總線與所述飛控模塊連接的發(fā)動機,所述飛控模塊通過所述can?總線獲取所述發(fā)動機的轉(zhuǎn)速、總里程數(shù)、距離上次保養(yǎng)里程數(shù)據(jù)并做日志存儲,然后將上述數(shù)據(jù)通過所述通信模塊輸給所述地面監(jiān)測平臺以進行實時監(jiān)控。
13、作為進一步改進的,所述無人機自動控制檢測系統(tǒng)還包括通過所述can?總線與所述飛控模塊連接的bms、油位計、rtk、以及各類傳感器;所述飛控模塊通過所述can?總線獲取所述bms、油位計、rtk、以及各類傳感器數(shù)據(jù)并做日志存儲,然后將上述數(shù)據(jù)通過所述通信模塊輸給所述地面監(jiān)測平臺以進行實時監(jiān)控。
14、作為進一步改進的,所述飛控模塊還進一步用于在所述無人機執(zhí)行任務(wù)前,進行功能自檢,檢測各個模塊是否能正常工作,是否壽命到了需要維修或者更換;并將相關(guān)信息做日志存儲,然后將上述數(shù)據(jù)通過所述通信模塊輸給所述地面監(jiān)測平臺以進行實時監(jiān)控。
15、作為進一步改進的,所述飛控模塊還進一步用于在所述無人機執(zhí)行任務(wù)時,通過所述can總線獲取各模塊的數(shù)據(jù),然后將各個模塊的數(shù)據(jù)通過所述通信模塊輸給所述地面監(jiān)測平臺以進行實時監(jiān)控。
16、作為進一步改進的,所述飛控模塊通過所述?can?總線獲取所述舵機模塊的電流ik具體包括:
17、通過公式計算獲得所述舵機模塊的電流ik,ik-1為所述舵機模塊上一刻計算獲得的電流,yk為電流的當前讀數(shù),α為低通濾器的常數(shù),且滿足,其中,?τ和t?分別為所述低通濾波器的時間常數(shù)和采樣周期?。
18、作為進一步改進的,所述飛控模塊還進一步用于在所述無人機執(zhí)行任務(wù)時,通過所述can總線獲取實時轉(zhuǎn)速r數(shù)據(jù),然后將實時轉(zhuǎn)速r數(shù)據(jù)通過所述通信模塊輸給所述地面監(jiān)測平臺,所述地面監(jiān)測平臺根據(jù)所述實時轉(zhuǎn)速r數(shù)據(jù)計算數(shù)據(jù)中的突變異常情況,從而進行預(yù)警。
19、作為進一步改進的,所述飛控模塊進一步根據(jù)所述轉(zhuǎn)速r和運行時間t推算使用壽命y具體包括:將轉(zhuǎn)速r和運行時間t進行卷積獲取使用壽命。
20、本發(fā)明的有益效果是:
21、本發(fā)明的無人機自動控制檢測系統(tǒng),通過飛控模塊與地面監(jiān)測平臺的通信連接,能夠?qū)崟r獲取無人機各關(guān)鍵模塊的運行數(shù)據(jù),如舵機模塊的電流、轉(zhuǎn)速、使用壽命等信息,實現(xiàn)對無人機狀態(tài)的精細化監(jiān)視,及時發(fā)現(xiàn)潛在故障或隱患,確保無人機的高可靠性運行,并大大減少機載計算機的資源。另外,相比傳統(tǒng)的人工分析飛行日志的方法,該系統(tǒng)能夠自動進行數(shù)據(jù)采集和分析,大大減少了人工分析的工作量,提高了監(jiān)控效率,尤其適用于高飛行頻次的物流無人機等應(yīng)用場景。
技術(shù)特征:
1.一種無人機自動控制檢測系統(tǒng),其特征在于,包括:無人機以及與所述無人機通信連接的地面監(jiān)測平臺;
2.如權(quán)利要求1所述的無人機自動控制檢測系統(tǒng),其特征在于,還包括通過所述can?總線與所述飛控模塊連接的發(fā)動機,所述飛控模塊通過所述can?總線獲取所述發(fā)動機的轉(zhuǎn)速、總里程數(shù)、距離上次保養(yǎng)里程數(shù)據(jù)并做日志存儲,然后將上述數(shù)據(jù)通過所述通信模塊輸給所述地面監(jiān)測平臺以進行實時監(jiān)控。
3.如權(quán)利要求1所述的無人機自動控制檢測系統(tǒng),其特征在于,還包括通過所述can?總線與所述飛控模塊連接的bms、油位計、rtk、以及各類傳感器;所述飛控模塊通過所述can總線獲取所述bms、油位計、rtk、以及各類傳感器數(shù)據(jù)并做日志存儲,然后將上述數(shù)據(jù)通過所述通信模塊輸給所述地面監(jiān)測平臺以進行實時監(jiān)控。
4.如權(quán)利要求1所述的無人機自動控制檢測系統(tǒng),其特征在于,所述飛控模塊還進一步用于在所述無人機執(zhí)行任務(wù)前,進行功能自檢,檢測各個模塊是否能正常工作,是否壽命到了需要維修或者更換;并將相關(guān)信息做日志存儲,然后將上述數(shù)據(jù)通過所述通信模塊輸給所述地面監(jiān)測平臺以進行實時監(jiān)控。
5.如權(quán)利要求1所述的無人機自動控制檢測系統(tǒng),其特征在于,所述飛控模塊還進一步用于在所述無人機執(zhí)行任務(wù)時,通過所述can總線獲取各模塊的數(shù)據(jù),然后將各個模塊的數(shù)據(jù)通過所述通信模塊輸給所述地面監(jiān)測平臺以進行實時監(jiān)控。
6.如權(quán)利要求1所述的無人機自動控制檢測系統(tǒng),其特征在于,所述飛控模塊通過所述can?總線獲取所述舵機模塊的電流ik具體包括:
7.如權(quán)利要求5所述的無人機自動控制檢測系統(tǒng),其特征在于,所述飛控模塊還進一步用于在所述無人機執(zhí)行任務(wù)時,通過所述can總線獲取實時轉(zhuǎn)速r數(shù)據(jù),然后將實時轉(zhuǎn)速r數(shù)據(jù)通過所述通信模塊輸給所述地面監(jiān)測平臺,所述地面監(jiān)測平臺根據(jù)所述實時轉(zhuǎn)速r數(shù)據(jù)計算數(shù)據(jù)中的突變異常情況,從而進行預(yù)警。
8.如權(quán)利要求1所述的無人機自動控制檢測系統(tǒng),其特征在于,所述飛控模塊進一步根據(jù)所述轉(zhuǎn)速r和運行時間t推算使用壽命y具體包括:將轉(zhuǎn)速r和運行時間t進行卷積獲取使用壽命。
技術(shù)總結(jié)
本發(fā)明提供了一種無人機自動控制檢測系統(tǒng),包括:無人機以及與無人機通信連接的地面監(jiān)測平臺;無人機包括:飛控模塊;通過CAN總線與飛控模塊連接的CAN轉(zhuǎn)PWM/SPI/IIC/UART模塊;電調(diào)模塊,與CAN轉(zhuǎn)PWM/SPI/IIC/UART模塊上的PWM接口連接;舵機模塊;電流傳感器,用于測量電調(diào)模塊輸出到舵機模塊的電流i;飛控模塊通過CAN總線獲取舵機模塊的電流i,并根據(jù)預(yù)存儲的舵機模塊的信息,將電流i<subgt;k</subgt;轉(zhuǎn)化為轉(zhuǎn)速r,其滿足:r=(i<subgt;k</subgt;*U)/(P<subgt;0</subgt;*x),U是電機額定電壓,P<subgt;0</subgt;是電機滿載功率,x為電機滿載轉(zhuǎn)速,k為大于等于1的自然數(shù);飛控模塊進一步根據(jù)轉(zhuǎn)速r和運行時間t推算使用壽命y,將壽命y值的累計值做日志存儲;還包括通信模塊,用于將上述數(shù)據(jù)傳輸給地面監(jiān)測平臺以進行實時監(jiān)控。
技術(shù)研發(fā)人員:黃興智,朱磊,郝秋衡,許毅斌
受保護的技術(shù)使用者:廈門云輪智能科技有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!