一種基于星間測距信息的衛(wèi)星編隊基線控制方法
本發(fā)明涉及航空航天領(lǐng)域,尤其涉及一種基于星間測距信息的衛(wèi)星編隊基線控制方法。
背景技術(shù):
1、衛(wèi)星編隊技術(shù)在地球遙感、空間科學探測及空間操作等多個重要領(lǐng)域具有極為關(guān)鍵的應用價值。在任務(wù)執(zhí)行階段,衛(wèi)星編隊為契合不同任務(wù)的具體要求,需穩(wěn)定維持既定構(gòu)型或者靈活實現(xiàn)構(gòu)型轉(zhuǎn)換,這就使得衛(wèi)星編隊的精確控制成為該領(lǐng)域的核心研究課題。
2、目前,針對近地軌道衛(wèi)星,全球?qū)Ш叫l(wèi)星系統(tǒng)(gnss)能夠為其提供高精度的軌道確定服務(wù)。基于此,在近地軌道衛(wèi)星編隊控制過程中,可充分利用?gnss?提供的導航信息,實現(xiàn)對衛(wèi)星編隊的有效控制。相關(guān)研究成果頗豐,例如,在《基于?sic?mems?陣列的高精度微納衛(wèi)星編隊保持》一文中,深入研究了借助瞬時脈沖控制策略來達成高精度微納衛(wèi)星編隊保持的技術(shù)方案;而《衛(wèi)星編隊脈沖機動維持控制與策略》則聚焦于近地圓軌道衛(wèi)星編隊維持問題,對脈沖控制方案及維持控制策略展開了系統(tǒng)研究。
3、然而,當研究范疇拓展至月球軌道衛(wèi)星編隊,以及其他因所處環(huán)境無法獲取?gnss系統(tǒng)支持的衛(wèi)星編隊時,傳統(tǒng)依賴實時導航狀態(tài)信息的控制方法便難以滿足實際需求。因此,迫切需要研發(fā)一種不依賴于導航狀態(tài)信息的創(chuàng)新控制方法,以填補該領(lǐng)域的技術(shù)空白,推動衛(wèi)星編隊技術(shù)在更廣泛空間場景中的應用與發(fā)展。
技術(shù)實現(xiàn)思路
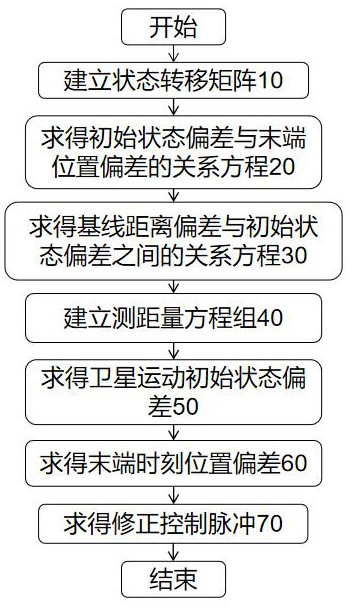
1、本發(fā)明針對無gnss系統(tǒng)的衛(wèi)星編隊,提出一種基于星間測距信息的衛(wèi)星編隊基線控制方法,其特征在于,包括:
2、根據(jù)cw方程求得其解析解,建立狀態(tài)轉(zhuǎn)移矩陣;
3、根據(jù)狀態(tài)轉(zhuǎn)移矩陣,得到從期望初始狀態(tài)和實際初始狀態(tài)出發(fā)到達的末端位置狀態(tài);
4、將所述末端位置狀態(tài)相減,從而得到衛(wèi)星運動初始狀態(tài)偏差與末端時刻位置偏差的關(guān)系方程;
5、將期望基線距離與實際基線距離相減得到基線距離偏差;
6、根據(jù)期望基線距離與衛(wèi)星運動初始狀態(tài)關(guān)系得到基線距離偏差與衛(wèi)星運動初始狀態(tài)偏差之間的關(guān)系方程;
7、進行n次測距,根據(jù)所述基線距離偏差與衛(wèi)星運動初始狀態(tài)偏差之間的關(guān)系方程建立六次過往時刻的測距量方程組,其中n為大于等于六的正整數(shù);
8、根據(jù)所述測距量方程組,進行反解求得衛(wèi)星運動初始狀態(tài)偏差;
9、通過衛(wèi)星運動初始狀態(tài)偏差與末端時刻位置偏差的關(guān)系方程得到末端時刻位置偏差;以及
10、根據(jù)末端時刻位置偏差得到修正控制脈沖。
11、在本發(fā)明一實施例中,所述根據(jù)cw方程求得其解析解包括:建立如下cw方程:
12、
13、其中為主星lvlh坐標系下子星相對主星的運動的x向加速度;
14、為主星lvlh坐標系下子星相對主星的運動的y向加速度;
15、為主星lvlh坐標系下子星相對主星的運動的z向加速度;
16、為主星lvlh坐標系下子星相對主星的運動的y向速度;
17、為主星lvlh坐標系下子星相對主星的運動的x向速度;
18、n為主星運動的軌道角速度;
19、(x,y,z)為主星lvlh坐標系下子星相對主星的運動位置狀態(tài)。
20、在本發(fā)明一實施例中,所述根據(jù)cw方程求得其解析解還包括:解得解析解為:
21、
22、其中(x0,y0,z0)為子星相對主星的初始位置狀態(tài);
23、,,,為t0時刻子星相對主星的初始速度狀態(tài);
24、,,,為t時刻子星相對主星的速度狀態(tài);
25、t為運動時間。
26、在本發(fā)明一實施例中,所述得到衛(wèi)星運動初始狀態(tài)偏差與末端時刻位置偏差的關(guān)系方程包括:得到末端時刻衛(wèi)星y向的偏差為:
27、
28、其中 a矩陣表示為
29、,
30、;
31、;
32、為初始狀態(tài)偏差;
33、,,為子星相對主星的初始位置狀態(tài)偏差;
34、,,為子星相對主星的初始速度狀態(tài)偏差。
35、在本發(fā)明一實施例中,根據(jù)末端時刻位置偏差得到修正控制脈沖包括:
36、解得末端時刻衛(wèi)星y向的偏差與修正控制脈沖的關(guān)系方程為:
37、
38、式中,;
39、;
40、求解得到修正控制脈沖:;
41、其中為修正時刻所需的修正控制脈沖;
42、,,分別為在x,y,z方向上的分量。
43、在本發(fā)明一實施例中,所述修正控制脈沖為相對運動坐標系中y方向距離的控制,其表達式為:
44、。
45、在本發(fā)明一實施例中,所述得到基線距離偏差與衛(wèi)星運動初始狀態(tài)偏差之間的關(guān)系方程包括:
46、得到基線距離偏差表達式;
47、提供期望基線距離與初始狀態(tài)衛(wèi)星運動初始狀態(tài)關(guān)系式;;
48、通過對期望基線距離表達式求全微分得到基線距離偏差與衛(wèi)星運動初始狀態(tài)偏差之間的關(guān)系方程;
49、其中表示從星相對于主星的期望基線距離;
50、表示從星相對于主星的實際基線距離。
51、在本發(fā)明一實施例中,所述建立六次過往時刻的測距量方程組包括:得到測距量方程組:
52、
53、其中為初始狀態(tài)偏差;
54、,,,為t0時刻子星相對主星的初始速度狀態(tài);
55、(x0,y0,z0)為子星相對主星的初始位置狀態(tài);
56、l1,l2,l3,l4,l5,l6為六次過往時刻測距中子星相對主星的基線距離
57、δl1,δl2,δl3,δl4,δl5,δl6為六次過往時刻測距中基線距離偏差。
58、本發(fā)明基于無gnss系統(tǒng)的月球軌道衛(wèi)星編隊,利用星間測距量數(shù)據(jù)獲取方便且星間低增益鏈路測距精度較高的特性,提出了一種依靠星間測距信息的基線控制方法,能夠?qū)崿F(xiàn)精確的基線控制。具有如下有益效果:
59、(1)該方法擺脫了對精確實時導航信息的依賴,極大地降低了工程實施難度與成本,在實際工程應用中具有極高的實用價值與推廣潛力。
60、(2)相較于傳統(tǒng)的導航數(shù)據(jù)獲取方式,測距數(shù)據(jù)獲取過程更為簡便快捷。同時,在星間低增益鏈路展現(xiàn)出卓越的測距性能,測距精度穩(wěn)定達到1m,為實現(xiàn)高精度的基線控制提供了堅實可靠的數(shù)據(jù)基礎(chǔ)。
技術(shù)特征:
1.一種基于星間測距信息的衛(wèi)星編隊基線控制方法,其特征在于,包括:
2.如權(quán)利要求1所述的衛(wèi)星編隊基線控制方法,其特征在于,所述根據(jù)cw方程求得其解析解包括:建立如下cw方程:
3.如權(quán)利要求2所述的衛(wèi)星編隊基線控制方法,其特征在于,所述根據(jù)cw方程求得其解析解還包括:解得解析解為:
4.如權(quán)利要求1所述的衛(wèi)星編隊基線控制方法,其特征在于,所述得到衛(wèi)星運動初始狀態(tài)偏差與末端時刻位置偏差的關(guān)系方程包括:得到末端時刻衛(wèi)星y向的偏差為:
5.如權(quán)利要求1所述的衛(wèi)星編隊基線控制方法,其特征在于,根據(jù)末端時刻位置偏差得到修正控制脈沖包括:
6.如權(quán)利要求5所述的衛(wèi)星編隊基線控制方法,其特征在于,所述修正控制脈沖為相對運動坐標系中y方向距離的控制,其表達式為:
7.如權(quán)利要求1所述的衛(wèi)星編隊基線控制方法,其特征在于,所述得到基線距離偏差與衛(wèi)星運動初始狀態(tài)偏差之間的關(guān)系方程包括:
8.如權(quán)利要求1所述的衛(wèi)星編隊基線控制方法,其特征在于,所述建立六次過往時刻的測距量方程組包括:得到測距量方程組:
技術(shù)總結(jié)
本發(fā)明提供了一種基于星間測距信息的衛(wèi)星編隊基線控制方法,針對無GNSS系統(tǒng)的衛(wèi)星編隊,能不依賴實時導航信息、依靠星間測距信息實現(xiàn)基線的精確控制。該基線控制方法主要分為狀態(tài)轉(zhuǎn)移矩陣的建立、測距量方程的建立和修正控制脈沖解算三個部分。相比于導航數(shù)據(jù)獲取,測距數(shù)據(jù)獲取較為方便,且星間的低增益鏈路測距精度達到1m。該方法能不依賴實時導航信息、充分利用星間測距信息實現(xiàn)基線的精確控制。
技術(shù)研發(fā)人員:張永合,王亞敏,張曉峰,余會昌,強祺昌,張文秀,曹焱
受保護的技術(shù)使用者:中國科學院微小衛(wèi)星創(chuàng)新研究院
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!