一種飛機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法與流程
本申請(qǐng)涉及一種飛機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法,屬于空戰(zhàn)機(jī)動(dòng)對(duì)抗。
背景技術(shù):
1、當(dāng)兩架飛機(jī)處于大航線交叉角狀態(tài),并擁有足夠的航線間隔時(shí),雙方將進(jìn)入名為剪刀的空戰(zhàn)機(jī)動(dòng)。剪刀機(jī)動(dòng)指的是雙方為爭(zhēng)取后半球優(yōu)勢(shì),在同一個(gè)機(jī)動(dòng)平面進(jìn)行一系列對(duì)頭轉(zhuǎn)彎和沖前,兩個(gè)的飛行軌跡看起來像是一系列互相顛倒反復(fù)的飛行路線。在剪刀機(jī)動(dòng)中,飛行速度決定了轉(zhuǎn)彎半徑和轉(zhuǎn)彎的速率,需要選擇合適的飛行速度,使得自己飛機(jī)機(jī)頭優(yōu)先指向?qū)κ郑紦?jù)角度優(yōu)勢(shì)。
2、目前的剪刀機(jī)動(dòng)速度選擇方法主要是依據(jù)飛機(jī)的轉(zhuǎn)彎特性,根據(jù)飛機(jī)飛行速度計(jì)算穩(wěn)定轉(zhuǎn)彎半徑及轉(zhuǎn)彎速率,轉(zhuǎn)彎速率越好,速度較慢的飛機(jī)轉(zhuǎn)彎半徑更小,更容易占據(jù)角度優(yōu)勢(shì),讓自己處于對(duì)手的轉(zhuǎn)彎內(nèi)側(cè)。但該種方法的局限性在于未考慮雙機(jī)對(duì)抗的初始態(tài)勢(shì),尤其是雙機(jī)的距離態(tài)勢(shì)信息,而雙機(jī)對(duì)抗初始的距離態(tài)勢(shì)信息會(huì)對(duì)空戰(zhàn)對(duì)抗結(jié)果產(chǎn)生顯著影響。此外,在近距空戰(zhàn)中,該種方法無法對(duì)自己飛機(jī)的飛行速度進(jìn)行分析,導(dǎo)致空戰(zhàn)對(duì)抗的時(shí)間長(zhǎng),影響空戰(zhàn)效率。
技術(shù)實(shí)現(xiàn)思路
1、本申請(qǐng)的目的在于提供一種飛機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法,綜合考慮雙機(jī)的初始態(tài)勢(shì)信息得到使得己方飛機(jī)獲勝的最優(yōu)的剪刀機(jī)動(dòng)速度以及空戰(zhàn)對(duì)抗結(jié)束時(shí)刻兩架飛機(jī)的距離,直觀呈現(xiàn)機(jī)動(dòng)對(duì)抗過程。
2、為實(shí)現(xiàn)上述目的,本申請(qǐng)第一方面提供了一種飛機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法,包括:
3、獲取飛機(jī)和敵機(jī)在空戰(zhàn)對(duì)抗開始時(shí)的初始態(tài)勢(shì)信息,其中,所述初始態(tài)勢(shì)信息包括飛機(jī)與敵機(jī)之間的初始距離、以及飛機(jī)和敵機(jī)各自的飛行速度、轉(zhuǎn)彎角速度、轉(zhuǎn)彎半徑;
4、根據(jù)所述初始態(tài)勢(shì)信息構(gòu)建優(yōu)化模型,其中,所述優(yōu)化模型的優(yōu)化目標(biāo)為飛機(jī)機(jī)頭指向敵機(jī)的速度大于敵機(jī)機(jī)頭指向飛機(jī)的速度;
5、遍歷飛機(jī)所有的允許飛行速度,通過所述優(yōu)化模型分別得到與各所述允許飛行速度相對(duì)應(yīng)的空戰(zhàn)對(duì)抗時(shí)間以及雙機(jī)最終距離,其中,所述空戰(zhàn)對(duì)抗時(shí)間為飛機(jī)機(jī)頭指向敵機(jī)所用的時(shí)間或敵機(jī)機(jī)頭指向飛機(jī)所用的時(shí)間,所述雙機(jī)最終距離為空戰(zhàn)對(duì)抗結(jié)束時(shí)飛機(jī)與敵機(jī)之間的最終距離;
6、根據(jù)各所述空戰(zhàn)對(duì)抗時(shí)間和各所述雙機(jī)最終距離得到目標(biāo)飛行速度,并根據(jù)所述目標(biāo)飛行速度得到相應(yīng)的剪刀機(jī)動(dòng)速度,其中,所述目標(biāo)飛行速度為使得所述飛機(jī)機(jī)頭指向敵機(jī)的速度最快的允許飛行速度。
7、在一種實(shí)施方式中,所述獲取飛機(jī)和敵機(jī)在空戰(zhàn)對(duì)抗開始時(shí)的初始態(tài)勢(shì)信息包括:
8、分別獲取飛機(jī)和敵機(jī)的飛行速度;
9、根據(jù)所述飛行速度分別得到飛機(jī)和敵機(jī)各自的轉(zhuǎn)彎角速度和轉(zhuǎn)彎半徑。
10、在一種實(shí)施方式中,所述根據(jù)所述飛行速度分別得到飛機(jī)和敵機(jī)各自的轉(zhuǎn)彎角速度和轉(zhuǎn)彎半徑包括:
11、根據(jù)飛行速度得到飛機(jī)或敵機(jī)的轉(zhuǎn)彎半徑為:
12、
13、根據(jù)飛行速度與轉(zhuǎn)彎角速度的關(guān)系得到飛機(jī)或敵機(jī)的轉(zhuǎn)彎角速度為:
14、w=v/r
15、其中,r為飛機(jī)或敵機(jī)的轉(zhuǎn)彎半徑,v為飛機(jī)或敵機(jī)的飛行速度,w為飛機(jī)或敵機(jī)的轉(zhuǎn)彎角速度,ny為飛機(jī)或敵機(jī)的的法向過載。
16、在一種實(shí)施方式中,所述根據(jù)所述初始態(tài)勢(shì)信息構(gòu)建優(yōu)化模型包括:
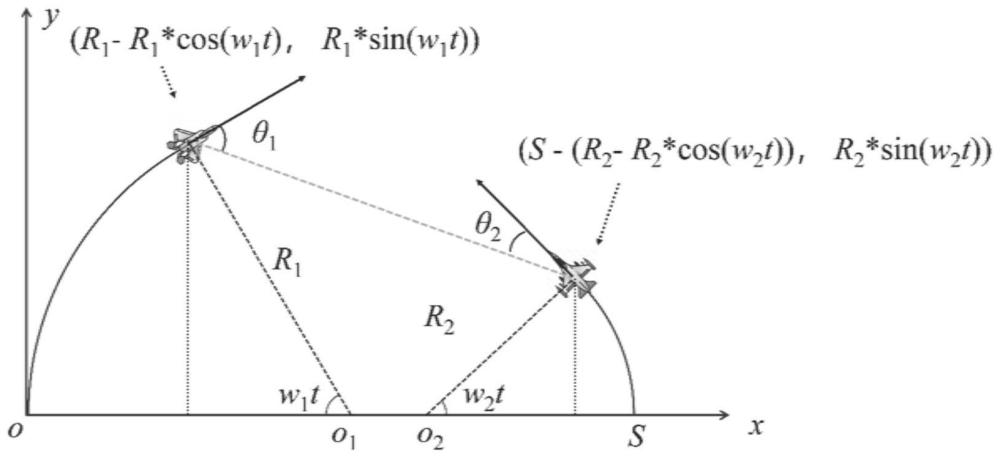
17、根據(jù)所述初始態(tài)勢(shì)信息設(shè)置直角坐標(biāo)系;
18、根據(jù)所述直角坐標(biāo)系確定第一夾角和第二夾角,其中,設(shè)飛機(jī)機(jī)頭所指向的方向?yàn)榈谝恢本€,敵機(jī)機(jī)頭所指向的方向?yàn)榈诙本€、飛機(jī)與敵機(jī)連線所形成的直線為第三直線,所述第一夾角為所述第一直線與所述第三直線之間的夾角,所述第二夾角為所述第二直線與所述第三直線之間的夾角;
19、分別計(jì)算所述第一夾角和所述第二夾角的正切值;
20、根據(jù)所述第一夾角的正切值或所述第二夾角的正切值得到空戰(zhàn)對(duì)抗時(shí)間;
21、根據(jù)所述空戰(zhàn)對(duì)抗時(shí)間計(jì)算雙機(jī)最終距離,并得到所述優(yōu)化模型。
22、在一種實(shí)施方式中,所述計(jì)算所述第一夾角和所述第二夾角的正切值包括:
23、分別確定所述第一直線、所述第二直線和所述第三直線的斜率;
24、根據(jù)所述斜率分別計(jì)算所述第一夾角和所述第二夾角的正切值:
25、
26、
27、其中,θ1為第一夾角的角度,θ2為第二夾角的角度,k1為第一直線的斜率,k2為第二直線的斜率,k12為第三直線的斜率。
28、在一種實(shí)施方式中,所述根據(jù)所述第一夾角的正切值或所述第二夾角的正切值得到空戰(zhàn)對(duì)抗時(shí)間包括:
29、當(dāng)所述第一夾角的正切值減小到0所用的時(shí)間小于所述第二夾角的正切值減小到0所用的時(shí)間時(shí),根據(jù)所述第一夾角的正切值得到空戰(zhàn)對(duì)抗時(shí)間;
30、當(dāng)所述第一夾角的正切值減小到0所用的時(shí)間大于所述第二夾角的正切值減小到0所用的時(shí)間時(shí),根據(jù)所述第二夾角的正切值得到空戰(zhàn)對(duì)抗時(shí)間。
31、在一種實(shí)施方式中,所述根據(jù)所述空戰(zhàn)對(duì)抗時(shí)間計(jì)算雙機(jī)最終距離包括:
32、計(jì)算空戰(zhàn)對(duì)抗結(jié)束時(shí)飛機(jī)的位置坐標(biāo):
33、
34、計(jì)算空戰(zhàn)對(duì)抗結(jié)束時(shí)敵機(jī)的位置坐標(biāo):
35、
36、根據(jù)飛機(jī)的位置坐標(biāo)和敵機(jī)的位置坐標(biāo)得到雙機(jī)最終距離:
37、
38、其中,r1為飛機(jī)的轉(zhuǎn)彎半徑,w1為飛機(jī)的轉(zhuǎn)彎角速度,r2為敵機(jī)的轉(zhuǎn)彎半徑,w1為敵機(jī)的轉(zhuǎn)彎角速度,s為初始距離,ttotal為空戰(zhàn)對(duì)抗時(shí)間。
39、在一種實(shí)施方式中,所述根據(jù)各所述空戰(zhàn)對(duì)抗時(shí)間和各所述雙機(jī)最終距離得到目標(biāo)飛行速度之后還包括:
40、按預(yù)設(shè)時(shí)間周期將與所述目標(biāo)飛行速度相對(duì)應(yīng)的空戰(zhàn)對(duì)抗時(shí)間進(jìn)行劃分,得到多個(gè)時(shí)間點(diǎn);
41、計(jì)算飛機(jī)在每個(gè)時(shí)間點(diǎn)的位置坐標(biāo),并根據(jù)各個(gè)位置坐標(biāo)得到飛機(jī)以所述目標(biāo)飛行速度飛行時(shí)的動(dòng)態(tài)飛行軌跡。
42、本申請(qǐng)第二方面提供了一種電子設(shè)備,包括:存儲(chǔ)器、處理器以及存儲(chǔ)在存儲(chǔ)器中并可在處理器上運(yùn)行的計(jì)算機(jī)程序,該處理器執(zhí)行計(jì)算機(jī)程序時(shí)實(shí)現(xiàn)上述第一方面或者上述第一方面的任一實(shí)施方式中的步驟。
43、本申請(qǐng)第三方面提供了一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),上述計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)存儲(chǔ)有計(jì)算機(jī)程序,上述計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)上述第一方面或者上述第一方面的任一實(shí)施方式中的步驟。
44、由上可見,本申請(qǐng)?zhí)峁┝艘环N飛機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法,綜合分析近距空戰(zhàn)對(duì)抗時(shí)飛機(jī)和敵機(jī)的初始態(tài)勢(shì)信息和飛機(jī)轉(zhuǎn)彎特性,以飛機(jī)機(jī)頭最快指向敵機(jī)為優(yōu)化目標(biāo),通過建立優(yōu)化模型計(jì)算得到己方飛機(jī)的最優(yōu)飛行速度,進(jìn)而得到最優(yōu)的剪刀機(jī)動(dòng)速度,并分析計(jì)算空戰(zhàn)對(duì)抗結(jié)束時(shí)刻兩架飛機(jī)的距離,直觀呈現(xiàn)機(jī)動(dòng)對(duì)抗過程,實(shí)現(xiàn)雙機(jī)近距空戰(zhàn)剪刀機(jī)動(dòng)取勝,提高空戰(zhàn)效率。本申請(qǐng)?zhí)峁┑娘w機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法可為飛行任務(wù)規(guī)劃、空戰(zhàn)戰(zhàn)術(shù)制定和培訓(xùn)教學(xué)提供技術(shù)支持,具有推廣應(yīng)用價(jià)值。
技術(shù)特征:
1.一種飛機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法,其特征在于,包括:
2.如權(quán)利要求1所述的飛機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法,其特征在于,所述獲取飛機(jī)和敵機(jī)在空戰(zhàn)對(duì)抗開始時(shí)的初始態(tài)勢(shì)信息包括:
3.如權(quán)利要求2所述的飛機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法,其特征在于,所述根據(jù)所述飛行速度分別得到飛機(jī)和敵機(jī)各自的轉(zhuǎn)彎角速度和轉(zhuǎn)彎半徑包括:
4.如權(quán)利要求1所述的飛機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法,其特征在于,所述根據(jù)所述初始態(tài)勢(shì)信息構(gòu)建優(yōu)化模型包括:
5.如權(quán)利要求4所述的飛機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法,其特征在于,所述計(jì)算所述第一夾角和所述第二夾角的正切值包括:
6.如權(quán)利要求4所述的飛機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法,其特征在于,所述根據(jù)所述第一夾角的正切值或所述第二夾角的正切值得到空戰(zhàn)對(duì)抗時(shí)間包括:
7.如權(quán)利要求4所述的飛機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法,其特征在于,所述根據(jù)所述空戰(zhàn)對(duì)抗時(shí)間計(jì)算雙機(jī)最終距離包括:
8.如權(quán)利要求1所述的飛機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法,其特征在于,所述根據(jù)各所述空戰(zhàn)對(duì)抗時(shí)間和各所述雙機(jī)最終距離得到目標(biāo)飛行速度之后還包括:
9.一種電子設(shè)備,包括:存儲(chǔ)器、處理器以及存儲(chǔ)在所述存儲(chǔ)器中并可在所述處理器上運(yùn)行的計(jì)算機(jī)程序,其特征在于,所述處理器執(zhí)行所述計(jì)算機(jī)程序時(shí)實(shí)現(xiàn)如權(quán)利要求1至8任一項(xiàng)所述方法的步驟。
10.一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),所述計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)存儲(chǔ)有計(jì)算機(jī)程序,其特征在于,所述計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)如權(quán)利要求1至8任一項(xiàng)所述方法的步驟。
技術(shù)總結(jié)
本申請(qǐng)公開了一種飛機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法,屬于空戰(zhàn)機(jī)動(dòng)對(duì)抗技術(shù)領(lǐng)域,包括:獲取飛機(jī)和敵機(jī)在空戰(zhàn)對(duì)抗開始時(shí)的初始態(tài)勢(shì)信息;根據(jù)所述初始態(tài)勢(shì)信息構(gòu)建優(yōu)化模型,優(yōu)化目標(biāo)為飛機(jī)機(jī)頭指向敵機(jī)的速度大于敵機(jī)機(jī)頭指向飛機(jī)的速度;遍歷飛機(jī)所有的允許飛行速度,通過優(yōu)化模型分別得到與各允許飛行速度相對(duì)應(yīng)的空戰(zhàn)對(duì)抗時(shí)間以及雙機(jī)最終距離;根據(jù)各空戰(zhàn)對(duì)抗時(shí)間和各雙機(jī)最終距離得到目標(biāo)飛行速度,并根據(jù)目標(biāo)飛行速度得到相應(yīng)的剪刀機(jī)動(dòng)速度,其中,所述目標(biāo)飛行速度為使得所述飛機(jī)機(jī)頭指向敵機(jī)的速度最快的允許飛行速度。本申請(qǐng)?zhí)峁┑娘w機(jī)剪刀機(jī)動(dòng)速度優(yōu)化方法可為飛行任務(wù)規(guī)劃、空戰(zhàn)戰(zhàn)術(shù)制定和培訓(xùn)教學(xué)提供技術(shù)支持。
技術(shù)研發(fā)人員:李培源,錢雪亮,趙貴喜,鄭洪濤,范文瀾,陳玉峰,張冀
受保護(hù)的技術(shù)使用者:中國(guó)人民解放軍93199部隊(duì)理論訓(xùn)練系
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!