用于包括車輪位置估計的商用車輛的相機監測系統的制作方法
本公開涉及使用車輛的相機監測系統(cms)的車輪跟蹤,并且更具體地涉及用于在車輪隱藏時跟蹤車輪位置的系統和方法。
背景技術:
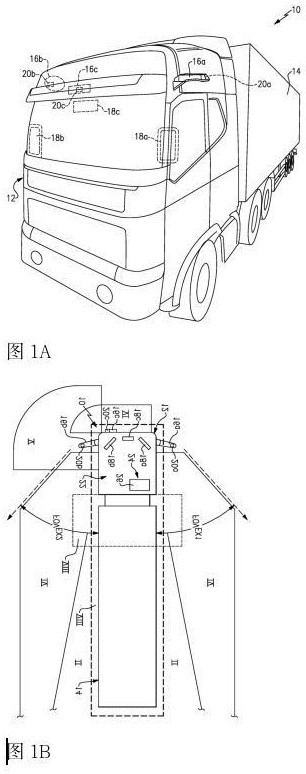
1、在商用車輛中利用相機監測系統,諸如用于補充視鏡視圖的相機系統,來增強車輛操作員看到周圍環境的能力。相機監測系統(cms)利用一個或多個相機來向車輛操作員提供增強的視場。在一些示例中,相機監測系統覆蓋比常規視鏡更大的視場,或者包括不能經由常規視鏡完全獲得的視圖。
2、半自動駕駛員輔助系統、相機監測系統、電子穩定性程序系統和其他車輛系統在車輛的整個操作中使用或需要關于各種車輛特征的位置的知識。這些特征可以是真實世界位置或拖車的一個或多個后輪的圖像中的位置。存在用于使用相機監測系統在車輪在后置相機的視場內可見時跟蹤車輪的位置的系統。然而,當拖車處于小拖車角度時,后拖車車輪在駕駛員側相機或乘客側相機的視場中不可見,并且車輪的真實世界位置以及車輪在圖像中的位置是未知的。此外,當駕駛員側相機或乘客側相機的視場被遮擋或以其他方式不可用時,無法使用現有系統來確定車輪在由被遮擋的相機生成的圖像中的位置。
技術實現思路
1、根據本公開的示例的用于估計拖車車輪位置的方法包括識別至少第一圖像中的第一組車輪位置。第一組車輪位置中的每個車輪位置與對應的拖車角度相關聯。在第一組車輪位置中將車輪位置的子集識別為誤報(false?positive),并且從第一組車輪位置中移除誤報。將二次回歸應用于第一組車輪位置,并且確定將至少第一圖像中的y位置與至少第一圖像中的x位置相關聯的拋物線曲線。確定拖車角度。通過將所確定的拖車角度應用于拋物線曲線,來估計當前車輪位置。
2、在前述的另一示例中,所述方法包括識別至少第二圖像中的第二組車輪位置,該第二圖像中的每個車輪位置與對應的拖車角度相關聯。
3、在前述任一項的另一示例中,所述方法包括:將所述第二組車輪位置中的車輪位置子集識別為誤報;以及從所述第一組車輪位置中移除所述誤報。
4、在前述任一項的另一示例中,第一圖像是ii類視圖和iv類視圖中的一個,并且第二圖像是車輛的相對側上的ii類視圖和iv類視圖。
5、在前述任一項的另一示例中,所述拋物線曲線根據y=ax^2+bx+c來定義,其中“a”不等于零,y是車輪在圖像中y軸上的位置,并且x是車輪在圖像中x軸上的位置。
6、在前述任一項的另一示例中,所述方法包括將所確定的車輪位置提供給至少一個附加車輛系統。
7、在前述任一項的另一示例中,至少一個附加車輛系統包括高級駕駛員輔助系統、相機監測系統、以及電子穩定性程序中的至少一個。
8、在前述任一項的另一示例中,當前車輪位置是圖像內的位置。
9、在前述任一項的另一示例中,當前車輪位置是車輪相對于車輛的真實世界三維位置。
10、在前述任一項的另一示例中,該方法包括:使用拋物線曲線在圖像空間中識別相對于牽引車的車輪軌跡。
11、在前述任一項的另一示例中,該方法包括:使用拋物線曲線在真實世界空間中識別相對于牽引車的車輪軌跡。
技術特征:
1.一種用于估計拖車車輪位置的方法,包括:
2.根據權利要求1所述的方法,還包括識別至少第二圖像中的第二組車輪位置,所述第二圖像中的每個車輪位置與對應的拖車角度相關聯。
3.根據權利要求2所述的方法,還包括將所述第二組車輪位置中的車輪位置的子集識別為誤報,并且從所述第一組車輪位置移除所述誤報。
4.根據權利要求2所述的方法,其中,所述第一圖像是ii類和iv類視圖中的一個,并且所述第二圖像是車輛的相對側上的ii類和iv類視圖。
5.根據權利要求1所述的方法,其中,所述拋物線曲線根據y=ax^2+bx+c來定義,其中“a”不等于零,y是所述車輪在圖像中y軸上的位置,并且x是所述車輪在圖像中x軸上的位置。
6.根據權利要求1所述的方法,還包括將所確定的車輪位置提供給至少一個附加車輛系統。
7.根據權利要求6所述的方法,其中,所述至少一個附加車輛系統包括高級駕駛員輔助系統、相機監測系統、以及電子穩定性程序中的至少一個。
8.根據權利要求1所述的方法,其中,所述當前車輪位置是所述圖像內的位置。
9.根據權利要求1所述的方法,其中,所述當前車輪位置是所述車輪相對于車輛的真實世界三維位置。
10.根據權利要求1所述的方法,還包括:使用所述拋物線曲線在圖像空間中識別相對于牽引車的車輪軌跡。
11.根據權利要求1所述的方法,還包括:使用所述拋物線曲線在真實世界空間中識別相對于牽引車的車輪軌跡。
技術總結
一種用于估計拖車車輪位置的方法,包括識別至少第一圖像中的第一組車輪位置。第一組車輪位置中的每個車輪位置與對應的拖車角度相關聯。在第一組車輪位置中將車輪位置的子集識別為誤報,并且從第一組車輪位置中移除誤報。將二次回歸應用于第一組車輪位置,并且確定將至少第一圖像中的y位置與至少第一圖像中的x位置相關聯的拋物線曲線。確定拖車角度。通過將所確定的拖車角度應用于拋物線曲線來估計當前車輪位置。
技術研發人員:魏文鵬,馬亮,門一凡,特洛伊·奧提斯·庫珀里德
受保護的技術使用者:石通瑞吉電子公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!