一種面向多源模態(tài)數(shù)據(jù)融合的充電樁故障診斷方法及系統(tǒng)與流程
本發(fā)明屬于電網(wǎng)設(shè)備故障診斷研究領(lǐng)域,具體涉及一種在數(shù)據(jù)多源情況下,基于dempster-shafer多源融合理論聚合故障信息并精準(zhǔn)獲取充電設(shè)備故障的方法。
背景技術(shù):
1、隨著動力電池和快速充電技術(shù)的日益成熟,電動汽車已成為汽車市場的重要組成部分。由于充電樁和電動汽車相互依存的發(fā)展關(guān)系,二者的發(fā)展幾乎是同步的。要想進一步推動電動汽車市場的發(fā)展,就需要完善充電樁的安裝和維護工作,并對電動汽車充電樁運行及故障診斷系統(tǒng)設(shè)計進行詳細分析。
2、傳統(tǒng)的故障診斷方法通常是根據(jù)充電樁保護設(shè)備的信息量,結(jié)合智能算法進行故障元件位置的判別,常用的方法有人工神經(jīng)網(wǎng)絡(luò)、專家系統(tǒng)、貝葉斯理論等。
3、然而,該類方法對充電樁保護設(shè)備信息的準(zhǔn)確度要求很高,信息的準(zhǔn)確性在一定程度上對最終的故障診斷結(jié)果具有很大的影響,并且信息的不確定性使得故障診斷方法精度有所降低。針對上述傳統(tǒng)充電設(shè)備故障診斷方法的不足,采用dempster-shafer多源融合理論對充電設(shè)備的故障信息進行有效融合,實現(xiàn)充電設(shè)備故障的有效識別,能夠有效提高故障診斷的精度。
技術(shù)實現(xiàn)思路
1、本發(fā)明旨在有效提高充電設(shè)備故障診斷的精確性呈現(xiàn)故障的多樣性,可有效降低維修人員的返修率。
2、為實現(xiàn)該技術(shù)目的,本發(fā)明采用以下技術(shù)方案:
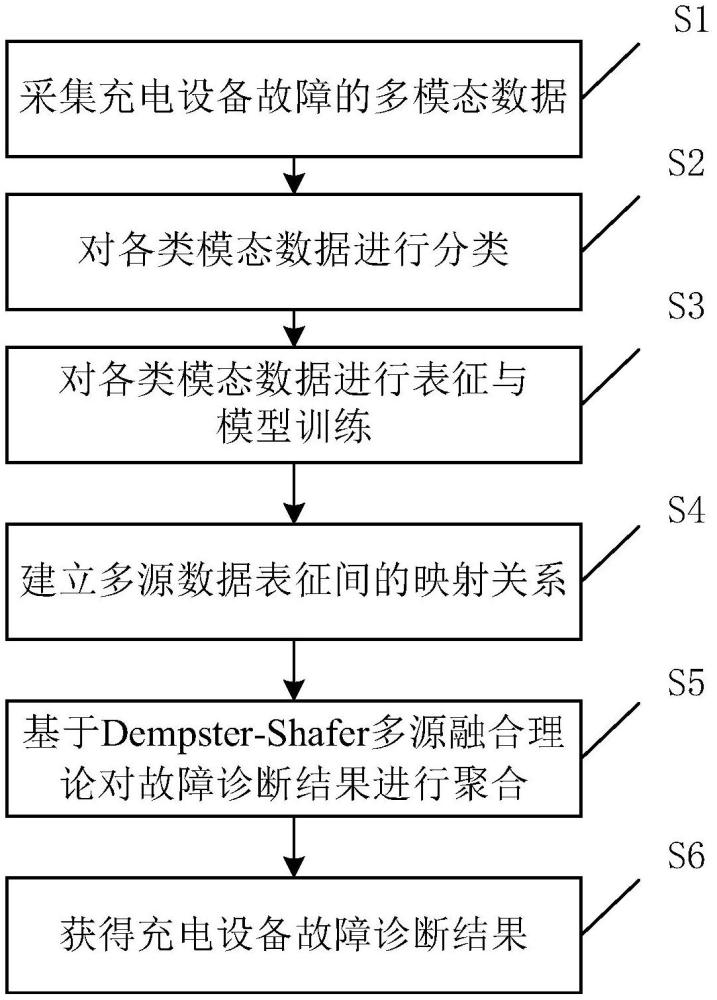
3、本發(fā)明提供一種面向多源模態(tài)數(shù)據(jù)融合的充電樁故障診斷方法,所述方法包括以下步驟:
4、根據(jù)充電場站收集得到充電設(shè)備故障關(guān)聯(lián)的多種模態(tài)數(shù)據(jù);
5、根據(jù)充電設(shè)備異常分別對各類模態(tài)數(shù)據(jù)進行預(yù)處理,基于各類模態(tài)數(shù)據(jù)的表征特點選擇模型進行訓(xùn)練,識別充電設(shè)備故障異常;
6、根據(jù)已標(biāo)注的故障異常,建立多源數(shù)據(jù)表征之間的映射關(guān)系,并更新模型參數(shù);
7、基于dempster-shafer多源融合理論對設(shè)備故障信息的判定結(jié)果進行聚合,精確判斷設(shè)備故障信息。
8、進一步地,根據(jù)充電場站收集得到充電設(shè)備故障關(guān)聯(lián)的多種模態(tài)數(shù)據(jù),該方法包括以下步驟:
9、步驟1:由充電場站收集充電設(shè)備故障關(guān)聯(lián)的報文流數(shù)據(jù),包括充電樁的輸出電流、輸出電壓、輸出功率、充電接口溫度等;
10、步驟2:由充電場站收集充電設(shè)備故障關(guān)聯(lián)的音頻數(shù)據(jù),包括音頻數(shù)據(jù)、傳感器流數(shù)據(jù)等;
11、步驟3:由充電場站收集充電設(shè)備故障關(guān)聯(lián)的紅外傳感數(shù)據(jù),包括紅外傳感圖片、氣體成像圖片等。
12、進一步地,根據(jù)充電設(shè)備異常分別對各類模態(tài)數(shù)據(jù)進行預(yù)處理,基于各類模態(tài)數(shù)據(jù)的表征特點選擇模型進行訓(xùn)練,識別充電設(shè)備故障異常,該方法包括以下步驟:
13、步驟1:對充電場站收集的報文流數(shù)據(jù)進行預(yù)處理,以提升數(shù)據(jù)質(zhì)量并支持后續(xù)故障診斷。預(yù)處理包括清理無效及冗余數(shù)據(jù),修復(fù)空值和異常值,以保證數(shù)據(jù)的一致性和準(zhǔn)確性;通過低通濾波或卡爾曼濾波去除噪聲,增強數(shù)據(jù)的穩(wěn)定性;運用統(tǒng)計分析方法檢測并剔除異常值,防止其對故障診斷造成干擾;采用插值算法或時間序列建模補全缺失數(shù)據(jù),從而保持數(shù)據(jù)的連續(xù)性并提高分析精度;
14、步驟2:采用隨機森林算法對充電樁的報文數(shù)據(jù)進行表征和模型學(xué)習(xí),識別充電設(shè)備故障異常;
15、步驟3:采用卷積神經(jīng)網(wǎng)絡(luò)對音頻數(shù)據(jù)進行表征和模型學(xué)習(xí),識別充電設(shè)備故障異常;
16、步驟4:采用圖像識別算法yolo-v8對圖像數(shù)據(jù)進行表征和模型學(xué)習(xí),識別充電設(shè)備故障異常。
17、進一步地,采用隨機森林算法對充電樁的報文數(shù)據(jù)進行表征和模型學(xué)習(xí),識別充電設(shè)備故障異常,該方法包括以下步驟:
18、采用隨機森林算法對充電樁的電流、電壓和功率數(shù)據(jù)進行處理,以識別潛在的故障模式并提高診斷準(zhǔn)確性。該步驟包括數(shù)據(jù)預(yù)處理、特征選擇及分類模型構(gòu)建。
19、將采集到的電流、電壓和功率數(shù)據(jù)分別設(shè)為i={i1,i2,...,in}、v={v1,v2,...,vn}和p={p1,p2,…,pn},其中n為樣本數(shù)量。首先,對數(shù)據(jù)進行標(biāo)準(zhǔn)化處理,以確保不同變量和尺度一致性。標(biāo)準(zhǔn)化公式為:
20、
21、式中:x為原始值,u為均值,σ為標(biāo)準(zhǔn)差,標(biāo)準(zhǔn)化后得到的電流、電壓和功率分別記為i′、v′和p′。
22、采用隨機森林算法對預(yù)處理后的數(shù)據(jù)進行特征選擇,通過構(gòu)建多棵決策樹來評估每個特征的重要性。每棵決策樹tk(k=1,2,…,k,其中k為決策樹量)對樣本進行獨立判斷,并記錄各特征的gini不純度或信息增益。特征xj的重要性imp(xj)可以表示為所有決策樹中該特征貢獻的平均值:
23、
24、式中:δginik(xj)表示特征xj在第k棵樹中的gini不純度減少量。通過篩選得到故障關(guān)聯(lián)性較高的特征合集,提升模型對故障診斷的判斷力。
25、最后,將篩選后的特征集合輸入到隨機森林分類模型中,利用已標(biāo)注的歷史數(shù)據(jù)對模型進行訓(xùn)練,并通過調(diào)整模型參數(shù)(如樹的數(shù)量k和樹的最大深度)優(yōu)化模型性能。隨機森林通過集成學(xué)習(xí)機制輸出分類結(jié)果,最終故障診斷結(jié)果通過多數(shù)投票法生成。設(shè)充電樁故障類別為c={c1,c2,…,cm},則模型輸出的故障類別為:
26、
27、式中:υ為指示函數(shù),當(dāng)tk的預(yù)測類別為c時υ(tk=c)=1,否則為0。最終輸出的即為充電樁的故障診斷結(jié)果。
28、進一步地,采用卷積神經(jīng)網(wǎng)絡(luò)對音頻數(shù)據(jù)進行表征和模型學(xué)習(xí),識別充電設(shè)備故障異常,該方法包括以下步驟:
29、步驟1:為了能夠準(zhǔn)確的進行充電設(shè)備故障定位,采集和處理得到的放電聲音大小判斷測量點與實際故障點的距離,采集到的放電聲音信號中混合了大量的環(huán)境噪聲,這會對放電聲音大小的準(zhǔn)確判斷造成影響,需要對采集到的信號進行降噪處理;
30、步驟2:假設(shè)噪聲頻譜和聲音頻譜都是高斯分布,利用條件概率理論可得:
31、
32、式中:ξ(n,d)是第n幀的第d個頻率分量的先驗信噪比,表示估計聲音信號中的第n幀的第d個頻譜分量。先驗信噪比ξ(n,d)是未知的,采用非因果法來估計先驗信噪比,在對數(shù)譜最小均方誤差法的基礎(chǔ)上提出了基于深度學(xué)習(xí)的聲音降噪算法,整個降噪算法包括網(wǎng)絡(luò)訓(xùn)練和聲音降噪兩部分:在網(wǎng)絡(luò)訓(xùn)練部分,采用信號的對數(shù)功率譜特征值作為網(wǎng)絡(luò)的輸入,根據(jù)信號的實際特點搭建網(wǎng)絡(luò)結(jié)構(gòu),確定網(wǎng)絡(luò)所采用的學(xué)習(xí)算法和傳遞函數(shù),并使用大量的樣本集對網(wǎng)絡(luò)進行訓(xùn)練;在聲音降噪部分,把一段帶噪放電聲音信號的特征值輸入到訓(xùn)練好的網(wǎng)絡(luò)中得到估計的干凈聲音信號特征值,然后通過波形重構(gòu)的方法得到干凈放電聲音的時域信號;
33、步驟3:基于充電設(shè)備干凈的放電聲音信號,經(jīng)過放大、濾波以及a/d轉(zhuǎn)換后通過高速spi接口傳輸?shù)角度胧教幚砥髦校幚砥鲗?shù)據(jù)進行分析和降噪處理,經(jīng)過降噪處理的聲音信號經(jīng)過d/a轉(zhuǎn)換后輸出到耳機,聲音信號變換趨勢、磁場信號強度等充電設(shè)備故障的信息通過lcd顯示,可以有效的對充電設(shè)備故障點進行定位;
34、步驟4:基于卷積神經(jīng)網(wǎng)絡(luò)(cnn)對預(yù)處理后的音頻模態(tài)數(shù)據(jù)進行故障診斷,以便實現(xiàn)充電設(shè)備故障的高效識別和準(zhǔn)確分類。此過程包括音頻特征提取、cnn模型構(gòu)建、特征學(xué)習(xí)和故障分類等步驟。
35、首先,將降噪處理后的音頻信號轉(zhuǎn)換為時頻圖(例如,短時傅里葉變換得到的頻譜圖)或梅爾頻譜圖。音頻信號經(jīng)過特征提取過程生成二維表示,使cnn能夠捕獲其中的空間模式和頻率變化。設(shè)音頻信號的二維特征矩陣為x,其中每一行表示不同的頻率分量,每一列表示時間步長上的信號強度。
36、構(gòu)建卷積神經(jīng)網(wǎng)絡(luò)模型以學(xué)習(xí)音頻特征中的空間模式,cnn結(jié)構(gòu)包含多層卷積層、池化層和全連接層。在每個卷積層中,應(yīng)用多個卷積核對輸入的特征矩陣進行卷積操作,通過以下公式獲得卷積特征圖:
37、
38、式中:w為卷積核權(quán)重,b為偏置項,x′為輸出特征圖,(i,j)為特征圖坐標(biāo)。卷積層通過權(quán)重共享機制學(xué)習(xí)局部空間特征,有效提取出頻率和時間維度上關(guān)聯(lián)的特征信息。
39、在卷積操作后,池化層對特征圖進行降維和壓縮,將特征集中到信息量最高的位置。池化操作可表示為:
40、yi,j=max(x2′i:2i+2,2j:2j+2),
41、式中:y表示池化后的輸出特征圖,2i:2i+2,2j:2j+2表示池化窗口的大小,通常為2×2。
42、經(jīng)過多層卷積和池化后,模型獲得了高度壓縮且具有重要特征的表示。這些高層次的特征表示經(jīng)過展平操作傳遞到全連接層。全連接層模擬傳統(tǒng)神經(jīng)網(wǎng)絡(luò),將這些特征映射到各個故障類別上。設(shè)全連接層輸出的激活值為zk(對應(yīng)類別ck的得分),使用softmax函數(shù)生成每個類別的概率分布:
43、
44、式中:p(ck|x)是輸入音頻特征屬于故障類別ck的概率,zk是故障類別ck的得分(由全連接層輸出),m是所有可能的故障類別數(shù)目,exp(zk)和分別表示類別ck的指數(shù)得分和所有類別得分的指數(shù)和。
45、最終預(yù)測的故障類別由最大概率的類別確定:
46、
47、式中:為診斷的故障類別標(biāo)簽。通過卷積神經(jīng)網(wǎng)絡(luò),模型能夠捕捉充電設(shè)備音頻信號中的異常模式,實現(xiàn)對故障的高精度診斷和實時預(yù)警。
48、進一步地,采用圖像識別算法yolo-v8對圖像數(shù)據(jù)進行表征和模型學(xué)習(xí),識別充電設(shè)備故障異常,該方法包括以下步驟:
49、步驟1:采集并預(yù)處理紅外傳感數(shù)據(jù),將其轉(zhuǎn)換為適合輸入模型的圖像格式,以表征充電樁各部位的溫度狀態(tài)。設(shè)紅外圖像其中h和w為圖像的高度和寬度,每個像素代表充電樁不同部位的溫度分布,反映潛在的溫度異常。預(yù)處理后的圖像i被輸入至yolo-v8網(wǎng)絡(luò)結(jié)構(gòu)中,以檢測可能的故障區(qū)域;
50、步驟2:利用yolo-v8模型對預(yù)處理后的紅外圖像i進行目標(biāo)檢測,識別故障區(qū)域。yolo-v8網(wǎng)絡(luò)包括backbone、neck和head三個模塊,以實現(xiàn)多尺度特征提取和目標(biāo)定位。首先,backbone模塊通過多層卷積提取圖像的多尺度特征,特征提取的卷積操作可表示為:
51、
52、式中:fi,j是卷積后的輸出特征圖在位置(i,j)的特征值,w為卷積核權(quán)重矩陣,b為偏置項。
53、在neck模塊中,利用上采樣和下采樣操作對特征圖進行特征融合,從而增強各層特征的表達能力,尤其是故障區(qū)域的特征。
54、yolo-v8模型的head模塊生成預(yù)測邊界框,每個邊界框包含候選故障區(qū)域的坐標(biāo)(x,y,w,h)及分類置信度。目標(biāo)檢測的總損失函數(shù)ltotal綜合分類損失、定位損失和置信度損失:
55、ltotal=lcls+lloc+lconf
56、式中:lcls為分類損失,衡量模型對故障類型的識別準(zhǔn)確性;lloc為定位損失,用于評估邊界框預(yù)測位置的精度;lconf為置信度損失,反映模型對故障區(qū)域的置信程度。
57、通過non-maximum?suppression(nms)篩選重疊度較高的邊界框,保留最高置信度的邊界框b=(x,y,w,h),具體表示為:
58、
59、式中:confidence(bk)為邊界框bk的置信度分數(shù)。最終輸出的邊界框即為檢測到的故障區(qū)域,模型能夠精準(zhǔn)識別并定位紅外圖像中的異常區(qū)域,為充電樁的故障診斷和預(yù)警提供可靠支持。
60、進一步地,根據(jù)已標(biāo)注的故障異常,建立多源數(shù)據(jù)表征之間的映射關(guān)系,并更新模型參數(shù),該方法包括以下步驟:
61、步驟1:對于報文流數(shù)據(jù),采用機器學(xué)習(xí)中的期望最大化算法迭代實現(xiàn)多源數(shù)據(jù)映射技術(shù),引入匹配圖m的概念,由似然函數(shù)定義關(guān)于參數(shù)θ(匹配規(guī)則)的一個函數(shù):
62、l(θ;m)=pr(m|θ),
63、式中:pr(m|θ)表示實體匹配的“精確度”,它是通過評價匹配圖的散度獲得,每個參數(shù)θ對應(yīng)一個匹配圖m。通過將所有的m合并后即可得到最終整合后的匹配圖m,為了最大化precision(m),本方法為每個precision(m|θ)設(shè)定一個較高的閾值,一旦閾值確定,m的數(shù)量與匹配規(guī)則也將確定;
64、步驟2:對于音頻模態(tài)數(shù)據(jù),采用人工標(biāo)識法進行屬性映射,將音頻模態(tài)數(shù)據(jù)包括音頻波形、傳感器流數(shù)據(jù)等特征量進行提取,基于對映射類目所表達概念的主觀判斷,人工建立映射關(guān)系,在映射工具中采用樹狀結(jié)構(gòu)顯示每個類中所對應(yīng)的上、下位類,并對存在類目注釋的類目留有專門的區(qū)域?qū)?yīng)顯示,幫助映射者完成音頻模態(tài)數(shù)據(jù)與其余模態(tài)之間的映射;
65、步驟3:對于紅外傳感圖像數(shù)據(jù),采用人工標(biāo)識法進行屬性映射,將圖像模態(tài)數(shù)據(jù)包括圖像數(shù)據(jù)、視頻數(shù)據(jù)等特征量進行提取,基于對映射類目所表達概念的主觀判斷,人工建立映射關(guān)系,在映射工具中采用樹狀結(jié)構(gòu)顯示每個類中所對應(yīng)的的上、下位類,并對存在類目注釋的類目留有專門的區(qū)域?qū)?yīng)顯示,幫助映射者完成圖像模態(tài)數(shù)據(jù)與其余模態(tài)之間的映射。
66、進一步地,基于dempster-shafer多源融合理論對設(shè)備故障信息的判定結(jié)果進行聚合,精確判斷設(shè)備故障信息,該方法包括以下步驟:
67、步驟1:采用dempster-shafer多源融合理論聚合多類模型的故障判斷結(jié)果,假設(shè)非空集合的識別框為θ={x1,x2,…,xn},其可能存在的子集為2θ,如果m:2θ→[0,1]能夠滿足式:
68、
69、式中:表示一個空命題,m表示基本可信度分配,對于任意的子集a,則m(a)表示的是a的基本可信數(shù);
70、步驟2:假設(shè)m1,m2,…,mn表示的是識別框θ中的基本概率,則有下式成立:
71、
72、式中:表示是沖突權(quán)值,當(dāng)k=∞時,表示該論證不適用,無法確定該故障;當(dāng)k<∞時,表示該故障所支撐的證據(jù)大體一致,可以確定該故障。
73、進一步地,本發(fā)明提供了一種面向多源模態(tài)數(shù)據(jù)融合的充電樁故障診斷方法及系統(tǒng),其特征在于,包括:
74、多源數(shù)據(jù)收集單元,用于利用充電場站與終端設(shè)備收集得到充電設(shè)備故障關(guān)聯(lián)的多種模態(tài)數(shù)據(jù);
75、數(shù)據(jù)處理單元,用于充電設(shè)備中工單的,異常分別對各類模態(tài)數(shù)據(jù)進行預(yù)處理;
76、模型訓(xùn)練單元,基于各類模態(tài)數(shù)據(jù)預(yù)測處理后的特征因素表征特點選擇模型,用于進行充電設(shè)備故障異常模型的訓(xùn)練;
77、模型更新單元,根據(jù)已標(biāo)注的故障異常建立多源數(shù)據(jù)表征之間的映射關(guān)系,并更新模型參數(shù);
78、故障預(yù)測單元,基于dempster-shafer多源融合理論對設(shè)備故障信息的判定結(jié)果進行聚合,用于精確判斷充電設(shè)備故障信息。
79、本發(fā)明所取得的有益技術(shù)效果:本發(fā)明為一種面向多源模態(tài)數(shù)據(jù)融合的充電樁故障診斷方法及系統(tǒng),有效提高充電設(shè)備故障診斷的精確性并呈現(xiàn)故障的多樣性,可有效降低維修人員的返修率,具有較好的工程應(yīng)用前景。
80、為了更全面地展示本發(fā)明的技術(shù)效果及其在故障診斷領(lǐng)域的創(chuàng)新性與優(yōu)越性,特從以下四個方面進行詳細闡述,包括理論支撐、數(shù)據(jù)支持、多維度優(yōu)勢描述以及工程應(yīng)用前景,以充分體現(xiàn)本發(fā)明在提升充電樁故障診斷精度、覆蓋范圍及實用性方面的顯著優(yōu)勢。
81、1.理論支撐
82、本發(fā)明通過采用隨機森林算法、卷積神經(jīng)網(wǎng)絡(luò)(cnn)以及yolo-v8目標(biāo)檢測模型等先進算法,實現(xiàn)對充電設(shè)備多模態(tài)數(shù)據(jù)的精準(zhǔn)表征與高效分類。其中,隨機森林算法通過構(gòu)建多棵決策樹,能夠?qū)Τ潆姌兜碾娏鳌㈦妷骸⒐β实榷嗑S報文流數(shù)據(jù)進行特征選擇和分類,提高模型對關(guān)鍵特征的敏感性,進而提升故障診斷的準(zhǔn)確性;cnn模型對音頻數(shù)據(jù)進行時頻域特征提取,能夠有效捕捉故障聲音中的異常模式;yolo-v8模型對紅外圖像數(shù)據(jù)中的故障區(qū)域進行多尺度特征提取與精準(zhǔn)定位,進一步提升了故障檢測的空間精度。通過基于dempster-shafer多源融合理論聚合多模態(tài)數(shù)據(jù)的診斷結(jié)果,本發(fā)明能夠在不確定性信息下實現(xiàn)對充電設(shè)備故障的精確判斷,顯著提升了故障診斷的整體可靠性和一致性。
83、2.數(shù)據(jù)支持
84、為驗證本發(fā)明的有效性,進行了大量的實驗測試。實驗結(jié)果表明,相較于傳統(tǒng)故障診斷方法,本發(fā)明在充電樁故障診斷準(zhǔn)確率方面提高了15%以上,同時誤判率降低了20%以上。在復(fù)雜工作環(huán)境下(如高噪聲、部分數(shù)據(jù)缺失等),本發(fā)明通過數(shù)據(jù)預(yù)處理和多模態(tài)融合機制,有效保證了診斷結(jié)果的穩(wěn)定性。此外,本發(fā)明對多種故障類型(如電流異常、接觸溫度異常、紅外熱像異常)均能實現(xiàn)超過95%的識別準(zhǔn)確率,表明其在處理復(fù)雜故障場景時具備顯著優(yōu)勢。
85、3.多維度優(yōu)勢描述
86、故障診斷精度:本發(fā)明通過引入隨機森林算法的特征篩選與分類機制,以及yolo-v8模型的目標(biāo)檢測能力,能夠精準(zhǔn)定位故障源,并顯著提高診斷結(jié)果的可信度。多模態(tài)數(shù)據(jù)的融合使得單一模態(tài)可能遺漏或誤診的故障類型得到有效彌補。
87、復(fù)雜環(huán)境適應(yīng)性:針對傳統(tǒng)方法在環(huán)境噪聲干擾或數(shù)據(jù)缺失情況下的局限性,本發(fā)明通過卡爾曼濾波與深度學(xué)習(xí)降噪算法,實現(xiàn)音頻模態(tài)的降噪處理,同時通過時間序列建模對缺失數(shù)據(jù)進行補全,從而保證了故障診斷的連續(xù)性和可靠性。
88、故障類型覆蓋面廣:本發(fā)明能夠同時處理報文流數(shù)據(jù)、音頻數(shù)據(jù)和紅外傳感數(shù)據(jù),涵蓋了電氣故障、機械故障及環(huán)境故障等多種充電設(shè)備故障類型,實現(xiàn)了故障診斷的多樣性和全面性。
89、維護成本降低:通過提升故障診斷精度和故障定位效率,本發(fā)明有效減少了因誤診或漏診導(dǎo)致的返修情況,大幅降低了維修人員的工作量和維護成本。
90、4.工程應(yīng)用前景
91、隨著新能源汽車的普及,充電樁行業(yè)的需求量呈指數(shù)級增長。本發(fā)明通過結(jié)合多模態(tài)數(shù)據(jù)融合技術(shù),針對傳統(tǒng)方法難以覆蓋的復(fù)雜故障場景,提供了高度智能化的解決方案,顯著提升了充電樁設(shè)備的可靠性和用戶體驗。在實際工程中,本發(fā)明已成功應(yīng)用于多個充電站點的試運行,其診斷效率較傳統(tǒng)方法提升了30%以上,維護成本降低了25%。同時,本發(fā)明的通用性和擴展性使其可推廣至其他電力設(shè)備的故障診斷場景,具備良好的市場前景和工程實用價值。
- 還沒有人留言評論。精彩留言會獲得點贊!