一種智能化倉儲信息采集方法及系統(tǒng)與流程
本發(fā)明涉及智能倉儲,具體是一種智能化倉儲信息采集方法及系統(tǒng)。
背景技術(shù):
1、智能化倉儲是指通過部署各類傳感器、rfid標簽、無人機、機器人等智能硬件設(shè)備,全面、準確地實時采集倉庫內(nèi)的貨物信息、庫存狀態(tài)和環(huán)境參數(shù),從而實現(xiàn)對庫存水平的精準預(yù)測、貨物位置的快速定位、揀選路徑的最優(yōu)規(guī)劃等。
2、在現(xiàn)有的倉儲信息采集方案中,各個倉儲空間實際上是單獨分析的,每個倉儲空間在獨立的信息采集頻率下進行數(shù)據(jù)采集,數(shù)據(jù)傳輸壓力較大,實際上,對于倉儲場景來說,貨物幾乎都是間隔很長時間才會變化一次,實際的數(shù)據(jù)采集,其實有很多無效數(shù)據(jù),如何優(yōu)化現(xiàn)有的數(shù)據(jù)采集過程是本發(fā)明技術(shù)方案想要解決的技術(shù)問題。
技術(shù)實現(xiàn)思路
1、本發(fā)明的目的在于提供一種智能化倉儲信息采集方法及系統(tǒng),以解決上述背景技術(shù)中提出的問題。
2、為實現(xiàn)上述目的,本發(fā)明提供如下技術(shù)方案:
3、一種智能化倉儲信息采集方法,所述方法包括:
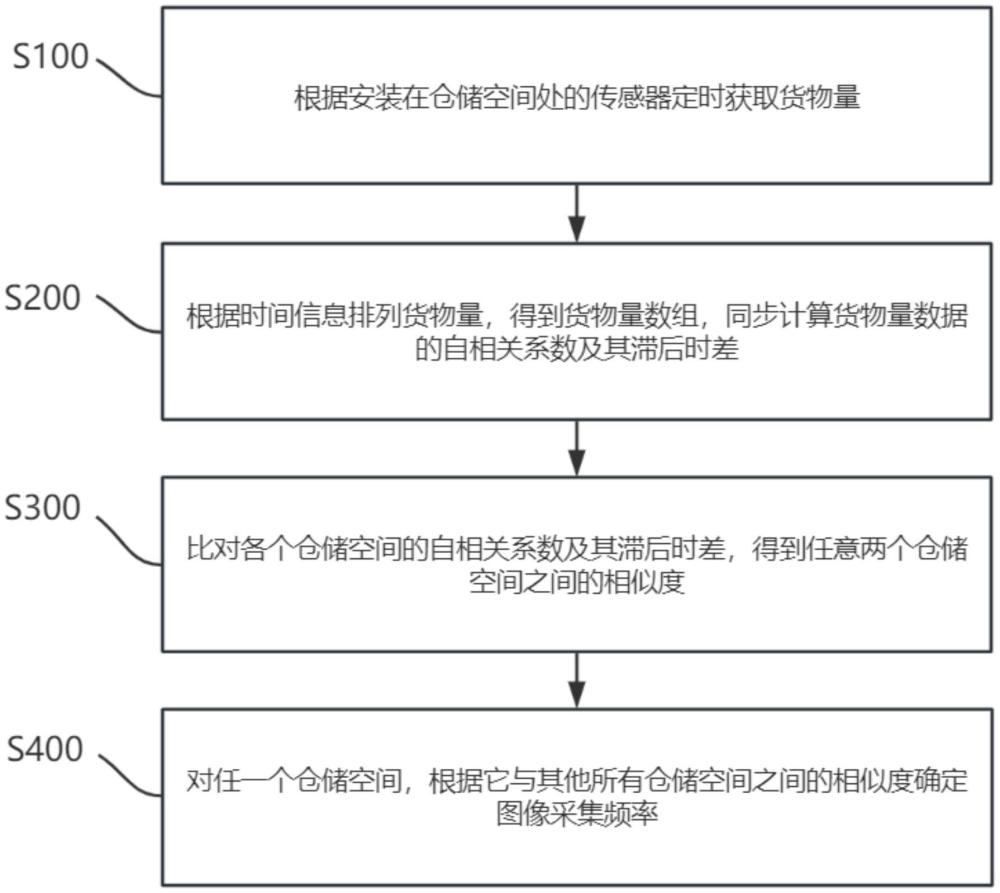
4、根據(jù)安裝在倉儲空間處的傳感器定時獲取貨物量;獲取到的貨物量中含有時間信息;所述倉儲空間中的傳感器的工作頻率相同;
5、根據(jù)時間信息排列貨物量,得到貨物量數(shù)組,同步計算貨物量數(shù)據(jù)的自相關(guān)系數(shù)及其滯后時差;所述滯后時差由數(shù)組中元素的序號差與定時獲取貨物量時的周期相關(guān);
6、比對各個倉儲空間的自相關(guān)系數(shù)及其滯后時差,得到任意兩個倉儲空間之間的相似度;
7、對任一個倉儲空間,根據(jù)它與其他所有倉儲空間之間的相似度確定圖像采集頻率。
8、進一步的,所述根據(jù)時間信息排列貨物量,得到貨物量數(shù)組,同步計算貨物量數(shù)據(jù)的自相關(guān)系數(shù)及其滯后時差的步驟包括:
9、根據(jù)時間信息排列貨物量,得到貨物量數(shù)組;
10、從貨物量數(shù)組的尾部開始,逆序獲取預(yù)設(shè)數(shù)量的貨物量,作為待分析數(shù)組;
11、創(chuàng)建序號差數(shù)列;所述序號差數(shù)列的首項、步長和尾項均為預(yù)設(shè)值;
12、對序號差數(shù)列中的每個序號差,均對貨物量數(shù)組計算一次自相關(guān)系數(shù);
13、選取所有計算出的自相關(guān)系數(shù)的最大值,作為最終的自相關(guān)系數(shù);
14、讀取最終的自相關(guān)系數(shù)對應(yīng)的序號差,讀取定時獲取貨物量時的周期,由序號差乘以周期,得到滯后時差。
15、進一步的,計算自相關(guān)系數(shù)的過程為的過程包括:
16、
17、式中,ρ(k)表示序號差為k的自相關(guān)系數(shù),cov(k)表示序號差為k自協(xié)方差,var(k)表示序號差為k的待分析數(shù)組的方差;xt表示待分析數(shù)組中的第k個元素,μ為待分析數(shù)組中各元素的均值;xt+k表示待分析數(shù)組中的第t+k個元素;n表示待分析數(shù)組中的元素總數(shù)。
18、進一步的,所述比對各個倉儲空間的自相關(guān)系數(shù)及其滯后時差,得到任意兩個倉儲空間之間的相似度的步驟包括:
19、接收工作人員入的距離范圍;
20、對任一個倉儲空間,以其為中心,依次查詢距離范圍內(nèi)的倉儲空間,與中心處的倉儲空間配對;
21、對于每一對倉儲空間,讀取兩個倉儲空間的自相關(guān)系數(shù)及其滯后時差;
22、比對相關(guān)系數(shù)及其滯后時差,計算得到相似度;
23、其中,任意兩個倉儲空間之間,僅計算一次相似度。
24、進一步的,所述對任一個倉儲空間,根據(jù)它與其他所有倉儲空間之間的相似度確定圖像采集頻率的步驟包括:
25、對任一個倉儲空間,讀取它與其他所有倉儲空間之間的相似度;
26、計算讀取到的相似度的均值,根據(jù)所述均值確定圖像采集頻率;
27、其中,圖像采集頻率和均值的關(guān)系為:
28、式中,f表示最終的圖像采集頻率,f0表示預(yù)設(shè)的基準頻率,e表示某一倉儲空間對應(yīng)的相似度均值,e0為預(yù)設(shè)的均值閾值;α和c均為預(yù)設(shè)的參數(shù)。
29、進一步的,所述根據(jù)安裝在倉儲空間處的傳感器定時獲取貨物量的步驟包括:
30、定時讀取倉儲空間的圖像;
31、對所述圖像進行輪廓識別,定位貨物,同步計算貨物體積;
32、根據(jù)貨物體積確定貨物量的準確度;
33、當所述準確度小于預(yù)設(shè)的準確度閾值時,生成指向該倉儲空間的檢查請求。
34、本發(fā)明技術(shù)方案還提供了一種智能化倉儲信息采集系統(tǒng),所述系統(tǒng)包括:
35、貨物量獲取模塊,用于根據(jù)安裝在倉儲空間處的傳感器定時獲取貨物量;獲取到的貨物量中含有時間信息;所述倉儲空間中的傳感器的工作頻率相同;
36、相關(guān)性判斷模塊,用于根據(jù)時間信息排列貨物量,得到貨物量數(shù)組,同步計算貨物量數(shù)據(jù)的自相關(guān)系數(shù)及其滯后時差;所述滯后時差由數(shù)組中元素的序號差與定時獲取貨物量時的周期相關(guān);
37、相似度計算模塊,用于比對各個倉儲空間的自相關(guān)系數(shù)及其滯后時差,得到任意兩個倉儲空間之間的相似度;
38、圖像采集模塊,用于對任一個倉儲空間,根據(jù)它與其他所有倉儲空間之間的相似度確定圖像采集頻率。
39、進一步的,所述相關(guān)性判斷模塊包括:
40、貨物量排列單元,用于根據(jù)時間信息排列貨物量,得到貨物量數(shù)組;
41、數(shù)據(jù)截取單元,用于從貨物量數(shù)組的尾部開始,逆序獲取預(yù)設(shè)數(shù)量的貨物量,作為待分析數(shù)組;
42、數(shù)列創(chuàng)建單元,用于創(chuàng)建序號差數(shù)列;所述序號差數(shù)列的首項、步長和尾項均為預(yù)設(shè)值;
43、計算執(zhí)行單元,用于對序號差數(shù)列中的每個序號差,均對貨物量數(shù)組計算一次自相關(guān)系數(shù);
44、最大值選取單元,用于選取所有計算出的自相關(guān)系數(shù)的最大值,作為最終的自相關(guān)系數(shù);
45、時差計算單元,用于讀取最終的自相關(guān)系數(shù)對應(yīng)的序號差,讀取定時獲取貨物量時的周期,由序號差乘以周期,得到滯后時差。
46、進一步的,所述相似度計算模塊包括:
47、距離范圍接收單元,用于接收工作人員入的距離范圍;
48、配對單元,用于對任一個倉儲空間,以其為中心,依次查詢距離范圍內(nèi)的倉儲空間,與中心處的倉儲空間配對;
49、參數(shù)讀取單元,用于對于每一對倉儲空間,讀取兩個倉儲空間的自相關(guān)系數(shù)及其滯后時差;
50、參數(shù)比對單元,用于比對相關(guān)系數(shù)及其滯后時差,計算得到相似度;
51、其中,任意兩個倉儲空間之間,僅計算一次相似度。
52、進一步的,所述圖像采集模塊包括:
53、相似度讀取單元,用于對任一個倉儲空間,讀取它與其他所有倉儲空間之間的相似度;
54、頻率確定單元,用于計算讀取到的相似度的均值,根據(jù)所述均值確定圖像采集頻率;
55、其中,圖像采集頻率和均值的關(guān)系為:
56、式中,f表示最終的圖像采集頻率,f0表示預(yù)設(shè)的基準頻率,e表示某一倉儲空間對應(yīng)的相似度均值,e0為預(yù)設(shè)的均值閾值;α和c均為預(yù)設(shè)的參數(shù)。
57、與現(xiàn)有技術(shù)相比,本發(fā)明的有益效果是:本發(fā)明對各個倉儲空間的貨物變化信息進行周期性分析,根據(jù)周期性分析結(jié)果確定每個倉儲空間與其他倉儲空間的貨物變化相似度,評估每個倉儲空間的重要程度,進而調(diào)節(jié)數(shù)據(jù)采集頻率,優(yōu)化了傳統(tǒng)的固定采集頻率。
- 還沒有人留言評論。精彩留言會獲得點贊!