面向港口智能駕駛的混合交通流仿真系統及方法與流程
本發明涉及港口仿真,尤其是涉及面向港口智能駕駛的混合交通流仿真系統及方法。
背景技術:
1、近年來,基于多智能體系統的(multi-agent?systems,mas)道路混合交通流仿真成為研究熱點。這類仿真系統能夠模擬不同類型的交通參與者(如機動車、非機動車、行人等)之間的交互行為,通過模擬每個個體的決策過程來再現復雜的混合交通狀況。例如,利用多智能體模擬不同的駕駛策略、反應時間和路徑選擇行為,提高了仿真模型的真實性和準確性。高級交通流仿真軟件,如vissim、sumo等,持續更新和發展,提供了強大的圖形界面和豐富的模型庫,支持用戶自定義模型,使得混合交通流的模擬更加直觀和高效。這些軟件廣泛應用于城市交通規劃、交通設計評價、自動駕駛技術測試等領域,成為連接理論研究與實際應用的橋梁。隨著電動汽車的普及,混合交通流仿真也開始考慮電動汽車的充電行為及其對交通流的影響,以及電動車隊對城市能源消耗和空氣質量的潛在改善。此外,仿真模型還被用來評估不同交通政策對減排目標的貢獻,比如鼓勵非機動交通出行的政策效果。
2、在港口場景,要結合港口場景的特殊性進行考慮。比如沒有紅綠燈,道路狹窄,掛車居多。交通控制不受限等因素結合考慮,隨著港區自動駕駛示范區的建設,針對港口的智能駕駛車輛仿真技術也開始逐步發展。但是,現有的車輛仿真模型過于關注本身車輛的運動學模型以及力學模型,針對港口場景關心的效率以及作業問題無法體現,干擾事件繞道過于隨機,使用機器學習推演能力無法結合現有實際作業情況得到更為符合時間線的干擾事件,未結合港區實際情況進行仿真結果分析,無法支撐后續作業計劃建設。
技術實現思路
1、本發明就是為了解決上述問題而提出面向港口智能駕駛的混合交通流仿真系統及方法。
2、本發明的技術方案是這樣實現的:
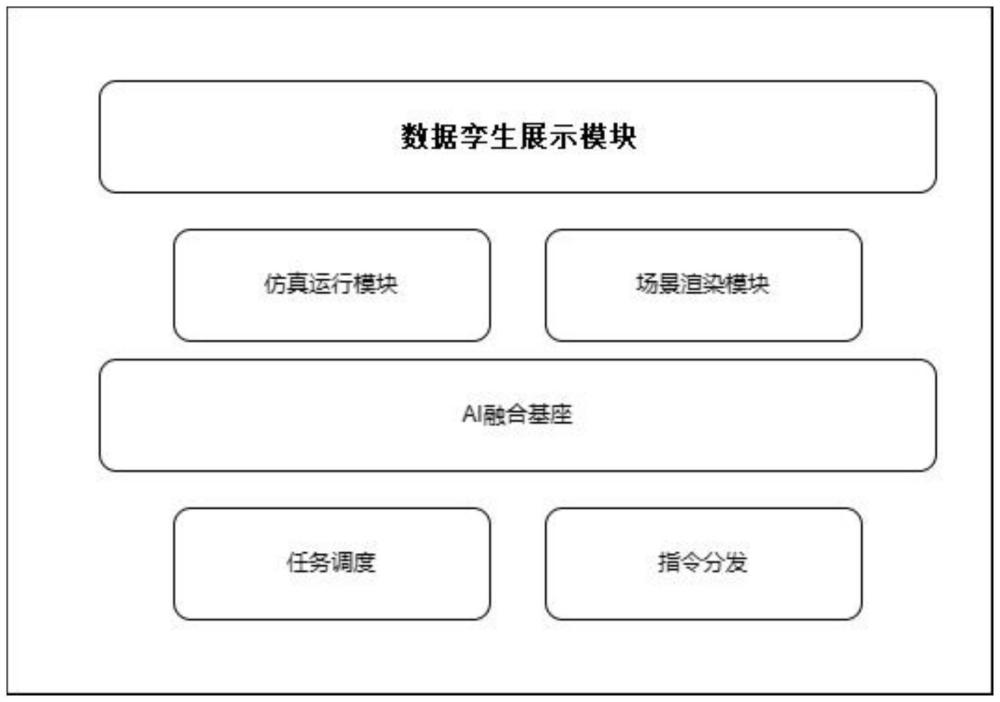
3、面向港口智能駕駛的混合交通流仿真系統及方法,所述仿真系統包括數據孿生展示模塊、仿真運行模塊、場景渲染模塊、ai融合基座、指令分發模塊;
4、數字孿生展示模塊:基于web?ui以及ue5引擎打造三維場景,將仿真過程在港口建模場景中用數據驅動的方式展現出來,能夠看到車輛在港區內的運行情況以及整體交通流的分布情況,支持回放仿真過程以及加速播放,便于港區人員直觀的看到仿真結果,能夠對仿真中的混合交通流進行分析;
5、仿真運行模塊:基于交通流仿真技術,導入ai融合基座生成的無人集卡車輛模型以及各類其他交通參與者的干擾模型,基于神經網絡技術生成的干擾事件進行干擾,模擬港區內的混合交通流情況;
6、場景渲染模塊:基于場景建模技術,根據港區的結構分布和cad圖生成港區場景模型,對港區的車道、堆場、碼頭面等影響交通流的區域進行分割建模,給仿真運行提供基礎運行場景模型;
7、ai融合基座:基于深度學習以及神經網絡技術,通過引入港區歷史數據,結合數學建模能力以及交通流仿真技術,得到車輛的運動學模型以及時間維度上的車輛數據模型,以及各類干擾事件的干擾模型,作為后續仿真運行的基礎;
8、任務調度模塊:基于港區的運載計劃以及tos港口調度系統的調度任務調度數據,根據每天的作業計劃生成車輛的作業任務,提供給指令分發模塊作為數據支撐基礎;
9、指令分發模塊:通過解析任務數據得到每個節點的作業指令數據,向各個模型發布作業指令,指引仿真的各個模型安裝指令進行仿真作業;
10、所述仿真方法包括以下步驟:
11、步驟1:仿真前準備,啟動仿真系統,加載初始化設置,配置集成框架,使得ai融合基座可以接受和處理來自不同模型的數據流;
12、步驟2:場景搭建、虛擬港口建立,導入地圖數據構建港口模型;
13、步驟3:數據導入,導入車輛信息、歷史車流信息到ai融合基座,生成車輛的運動學模型;
14、步驟4:任務調度分發,導入運載計劃到ai融合基座,根據運載計劃生成作業指令,將作業指令下發給無人集卡車輛模型;
15、步驟5:交通流模擬,無人集卡車輛模型根據作業指令在港口模型內按照作業指令移動成型交通流,根據歷史車流信息導入外集卡車輛模型和內集卡車輛模型到港口模型,形成混合交通流,觀察無人集卡模型的行駛狀態,獲取各模型的仿真數據;
16、步驟6:生成擾動事件,在無人集卡車輛模型完成作業指令時導入擾動事件到港口模型內進行作業擾動,影響交通流,觀察無人集卡車輛模型的行駛狀態,獲取各模型的仿真數據;
17、步驟7:完成作業指令,無人駕駛車輛模型按照不同的作業指令完成裝載、運輸和卸載作業仿真,更新車輛狀態和任務狀態;
18、步驟8:生成仿真報告,當達到預設的仿真時間或滿足其他終止條件時,結束仿真,收集并整理仿真過程中產生的所有數據,使用統計分析、可視化技術等手段對仿真結果進行深入分析,評估仿真模型的有效性和準確性,提取有價值的見解和建議生成仿真報告;
19、步驟:9:仿真模型優化調整,在仿真過程中,實時收集交通流、車輛狀態、任務完成情況等數據,根據這些數據,對仿真模型進行動態調整、優化。
20、進一步的,所述步驟4中作業指令的生成是基于運載計劃和當前交通狀況產生的,通過優化算法為車輛分配優化后的作業任務,優化算法以最小化總運輸時間或成本為優化目標。
21、采用了上述技術方案,本發明的有益效果為:本發明基于歷史車流數據、車輛模型、港口模型進行仿真模擬,建立集合無人駕駛車輛、外集卡車輛、內集卡車輛的混合交通流,通過引入擾動事件對混合交通流進行干擾,從而獲取無人駕駛車輛在擾動事件下的仿真運行數據,通過對該數據進行分析和優化,可以無人駕駛車輛的作業調度提供預測推演數據,便于提高無人駕駛車輛的調度效率。
技術特征:
1.面向港口智能駕駛的混合交通流仿真系統及方法,其特征在于:所述仿真系統包括數據孿生展示模塊、仿真運行模塊、場景渲染模塊、ai融合基座、指令分發模塊;
2.根據權利要求1所述的面向港口智能駕駛的混合交通流仿真系統及方法,其特征在于:所述步驟4中作業指令的生成是基于運載計劃和當前交通狀況產生的,通過優化算法為車輛分配優化后的作業任務,優化算法以最小化總運輸時間或成本為優化目標。
技術總結
本發明涉及港口仿真技術領域,尤其是公開了面向港口智能駕駛的混合交通流仿真系統及方法,所述仿真系統包括數據孿生展示模塊、仿真運行模塊、場景渲染模塊、AI融合基座、指令分發模塊;所述仿真方法包括步驟1:仿真前準備;步驟2:場景搭建、虛擬港口建立;步驟3:數據導入;步驟4:任務調度分發。有益效果在于:本發明基于歷史車流數據、車輛模型、港口模型進行仿真模擬,建立集合無人駕駛車輛、外集卡車輛、內集卡車輛的混合交通流,通過引入擾動事件對混合交通流進行干擾,從而獲取無人駕駛車輛在擾動事件下的仿真運行數據,通過對該數據進行分析和優化,可以無人駕駛車輛的作業調度提供預測推演數據,便于提高無人駕駛車輛的調度效率。
技術研發人員:陳新海,祖暉,郎尅一,王博思,婁方帝,劉晨,陳俊鵬,謝聿森,楊靜琰
受保護的技術使用者:招商智行(重慶)科技有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!