一種露采機自動糾偏方法、系統及存儲介質與流程
本發明涉及露采機,具體涉及一種露采機自動糾偏方法、系統及存儲介質。
背景技術:
1、目前,我國露天煤礦普遍采用穿孔爆破、單斗鏟挖掘、卡車運輸、半固定破碎站,半連續開采工藝,整體效率低,連續和半連續開采工藝應用較少。
2、采煤過程中由于對開采區域的煤層結構和煤體特性沒有精準的探測和掌握,普遍采用人工經驗或設備能力進行自主采煤,導致施工過程中有大量煤體浪費,影響露采機的施工效率和工作能力,進而影響全連續開采系統的施工軌跡。同時前期探測的整個開采區域隨著露采機的工作的深入導致煤巖體結構發生改變,前期開采區域探測信息已無法滿足施工需要,導致施工參數設置不合理,影響露采機的施工效率和工作能力,進而影響露采機的施工軌跡。
3、因此,現有技術有待于進一步發展。
技術實現思路
1、本發明的目的在于克服上述技術不足,提供一種露采機自動糾偏方法,以解決相關技術中露采機的行動軌跡發生偏移造成開采效率低的技術問題。
2、為達到上述技術目的,本發明采取了以下技術方案:提供了一種露采機自動糾偏方法,包括:
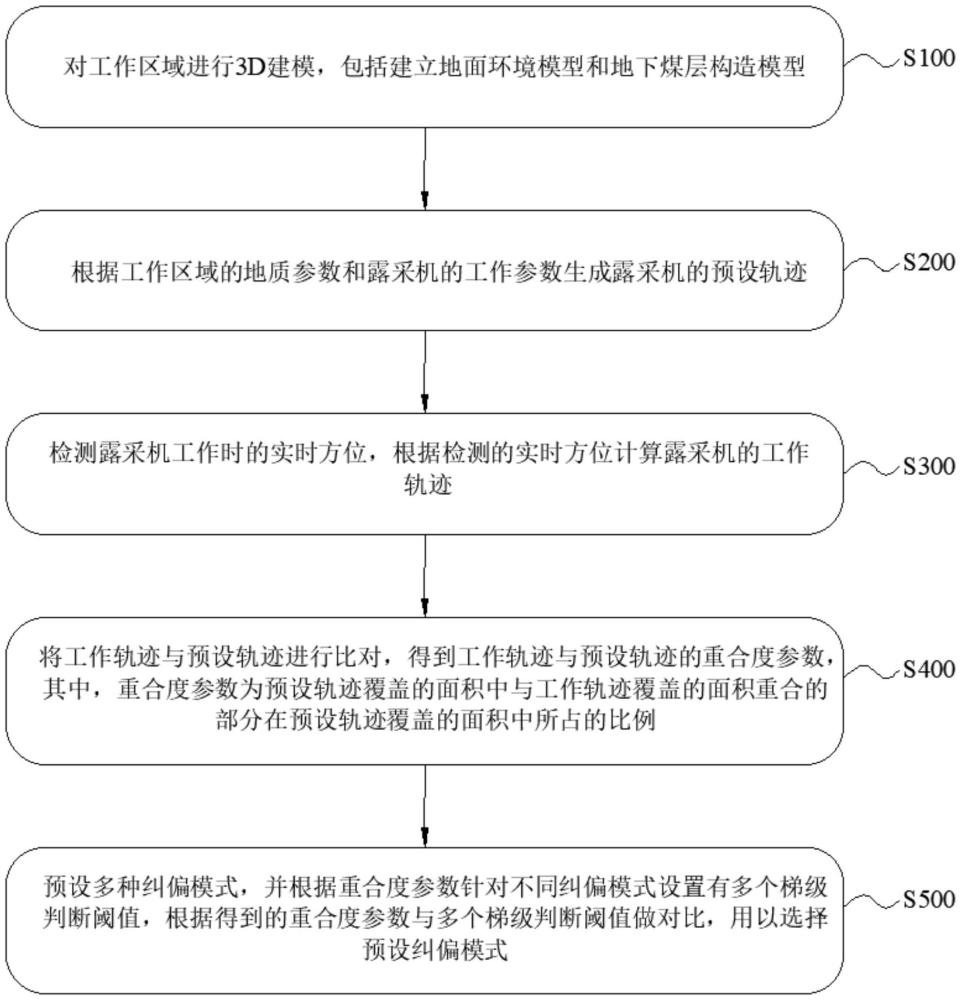
3、對工作區域進行3d建模,包括建立地面環境模型和地下煤層構造模型;
4、根據工作區域的地質參數和露采機的工作參數生成露采機的預設軌跡;
5、檢測露采機工作時的實時方位,根據檢測的實時方位計算露采機的工作軌跡;
6、將工作軌跡與預設軌跡進行比對,得到工作軌跡與預設軌跡的重合度參數,其中,重合度參數為預設軌跡覆蓋的面積中與工作軌跡覆蓋的面積重合的部分在預設軌跡覆蓋的面積中所占的比例;
7、預設多種糾偏模式,并根據重合度參數針對不同糾偏模式設置有多個梯級判斷閾值,根據得到的重合度參數與多個梯級判斷閾值做對比,用以選擇預設糾偏模式。
8、本發明的露采機自動糾偏方法可以實時檢測并調整露采機的工作軌跡,露采機工作軌跡發生偏移后及時反應,保證施工過程中全連續開采系統的開采軌跡始終處于最優狀態,使露采機保持較高的開采效率。
9、進一步地,建立地面環境模型的方法包括:
10、通過無人機平臺搭載傾斜攝影相機獲取地表航測影像數據庫;
11、對地表航測影像數據庫進行模型特征點提取、空三測量、多視影像密集匹配;
12、基于預設的密集點云數據庫和地表航測影像數據庫構建不規則三維網格和紋理映射,獲得真實的地面環境實景三維模型。
13、進一步地,建立地下煤層構造模型的方法包括:
14、基于剖面、鉆孔數據、離散點、多層dem數據,結合地層和礦體的形態、分布、接觸關系,建立地下煤層構造模型。
15、進一步地,根據工作區域的3d模型,判斷礦山條件以及適合開采工藝,選擇適合的開采程序,并根據所選開采程序進行露采機特定開采軌跡預測。
16、進一步地,檢測露采機工作時的實時方位的方法包括:
17、在露采機中心位置設置第一位置傳感器,以第一位置傳感器的初始位置為原點,以露采機的預設軌跡的軸線為y軸,在工作區域建立平面直角坐標系;
18、根據第一位置傳感器檢測的實時位置x1確定露采機在平面直角坐標系中的位置;
19、在露采機駕駛艙位置設置第二位置傳感器,獲得第一位置傳感器的實時位置x1和第二位置傳感器檢測的實時位置x2,即為露采機在平面直角坐標系中的前進方向;
20、將露采機的實時位置x1與前進方向結合得到露采機的實時方位。
21、進一步地,根據檢測的實時方位計算露采機的工作軌跡的方法包括:
22、在露采機的兩側分別設有第三位置傳感器和第四位置傳感器;
23、根據第三位置傳感器的實時位置x3和第四位置傳感器檢測的實時位置x4,x3和x4之間的最短距離即為露采機的開采寬度;
24、結合露采機的實時位置x1與前進方向得到露采機前進過程中開采的區域,即露采機的工作軌跡;其中,所述工作軌跡覆蓋的面積指第三位置傳感器的移動軌跡、第四位置傳感器的移動軌跡、平面直角坐標系中的x軸以及第一位移傳感器所在的與x軸平行的直線在平面直角坐標系中圍成的閉合圖形的面積。
25、進一步地,多個梯級判斷閾值包括第一預設值以及第二預設值,所述第一預設值大于所述第二預設值,根據得到的重合度參數選擇預設的糾偏模式的方法包括:
26、當重合度參數大于等于第一預設值時,露采機不需要糾偏;
27、當重合度參數小于第一預設值且大于等于第二預設值時,露采機啟動自動糾偏模式;
28、當重合度小于第二預設值時,露采機發出糾偏警報,并需要進行人工手動糾偏。
29、進一步地,所述第一預設值為0.9,所述第二預設值設置為0.7。
30、進一步地,所述露采機自動糾偏方法還包括:
31、基于檢測的實時方位預測露采機的未來運動軌跡;
32、將露采機的未來運動軌跡與預設軌跡進行對比,得到未來運動軌跡與預設軌跡的重合度參數;
33、若重合度參數低于預設值,則調整露采機的工作參數,對露采機的行動軌跡進行糾正。
34、本發明還提供一種露采機自動糾偏系統,所述露采機自動糾偏系統包括:
35、建模模塊,對工作區域進行3d建模,包括建立地面環境模型和地下煤層構造模型以及對露采機預設軌跡進行預測;
36、第一單元,建立地面環境模型的方法包括:
37、通過無人機平臺搭載傾斜攝影相機獲取地表航測影像數據庫;
38、對地表航測影像數據庫進行模型特征點提取、空三測量、多視影像密集匹配;
39、基于預設的密集點云數據庫和地表航測影像數據庫構建不規則三維網格和紋理映射,獲得真實的地面環境實景三維模型。
40、第二單元,建立地下煤層構造模型的方法包括:
41、基于剖面、鉆孔數據、離散點、多層dem數據,結合地層和礦體的形態、分布、接觸關系,建立地下煤層構造模型。
42、第三單元,根據工作區域的3d模型,判斷礦山條件以及適合開采工藝,選擇適合的開采程序,并根據所選開采程序進行露采機特定開采軌跡預測;
43、檢測模塊,所述檢測單元用于檢測所述露采機的實時方位,根據檢測的實時方位計算露采機的工作軌跡;
44、第四單元,用以檢測露采機工作時的實時方位,在露采機中心位置設置第一位置傳感器,以第一位置傳感器的初始位置為原點,以露采機的預設軌跡的軸線為y軸,在工作區域建立平面直角坐標系;
45、根據第一位置傳感器檢測的實時位置x1確定露采機在平面直角坐標系中的位置;
46、在露采機駕駛艙位置設置第二位置傳感器,獲得第一位置傳感器的實時位置x1和第二位置傳感器檢測的實時位置x2,即為露采機在平面直角坐標系中的前進方向;
47、將露采機的實時位置x1與前進方向結合得到露采機的實時方位;
48、計算模塊,所述計算單元用于根據檢測的實時方位計算露采機的工作軌跡,以及工作軌跡與預設軌跡的重合度參數;
49、第五單元,用以檢測的實時方位計算露采機的工作軌跡,包括在露采機的兩側分別設有第三位置傳感器和第四位置傳感器;
50、根據第三位置傳感器的實時位置x3和第四位置傳感器檢測的實時位置x4,x3和x4之間的最短距離即為露采機的開采寬度;
51、結合露采機的實時位置x1與前進方向得到露采機前進過程中開采的區域,即露采機的工作軌跡;其中,所述工作軌跡覆蓋的面積指第三位置傳感器的移動軌跡、第四位置傳感器的移動軌跡、平面直角坐標系中的x軸以及第一位移傳感器所在的與x軸平行的直線在平面直角坐標系中圍成的閉合圖形的面積;
52、第六單元,用以將工作軌跡與預設軌跡進行比對,得到工作軌跡與預設軌跡的重合度參數;
53、糾偏模塊,所述糾偏單元預設多種糾偏模式,并根據重合度參數針對不同糾偏模式設置有多個梯級判斷閾值,根據得到的重合度參數與多個梯級判斷閾值做對比,用以選擇預設糾偏模式;
54、第七單元,多個梯級判斷閾值包括第一預設值以及第二預設值,所述第一預設值大于所述第二預設值,根據得到的重合度參數選擇預設的糾偏模式的方法包括:
55、當重合度參數大于等于第一預設值時,露采機不需要糾偏;
56、當重合度參數小于第一預設值且大于等于第二預設值時,露采機啟動自動糾偏模式;
57、當重合度小于第二預設值時,露采機發出糾偏警報,并需要進行人工手動糾偏。
58、本發明還提供一種計算機可讀存儲介質,計算機可讀存儲介質上存儲有露采機自動糾偏方法的程序,實現露采機自動糾偏方法的程序被處理器執行以實現上述露采機糾偏方法的步驟。
- 還沒有人留言評論。精彩留言會獲得點贊!