一種目標分類方法及裝置與流程
本公開涉及圖像處理,尤其涉及一種目標分類方法及裝置。
背景技術:
1、在車載毫米波雷達應用過程中如何對行人和車輛等目標進行分類是一個重要的問題。傳統的目標分類方法多依賴攝像頭和激光雷達等信息處理手段,這些分類方式算法過程復雜、對雷達運行性能要求較高、整體計算耗時大,導致目標分類的效率低準確度不夠高,因此,如何提升目標分類的準確度成為了一個亟待解決的技術問題。
技術實現思路
1、本公開提供了一種目標分類方法、裝置、電子設備及存儲介質,以至少解決現有技術中存在的以上技術問題。
2、根據本公開的第一方面,提供了一種目標分類方法,所述方法包括:
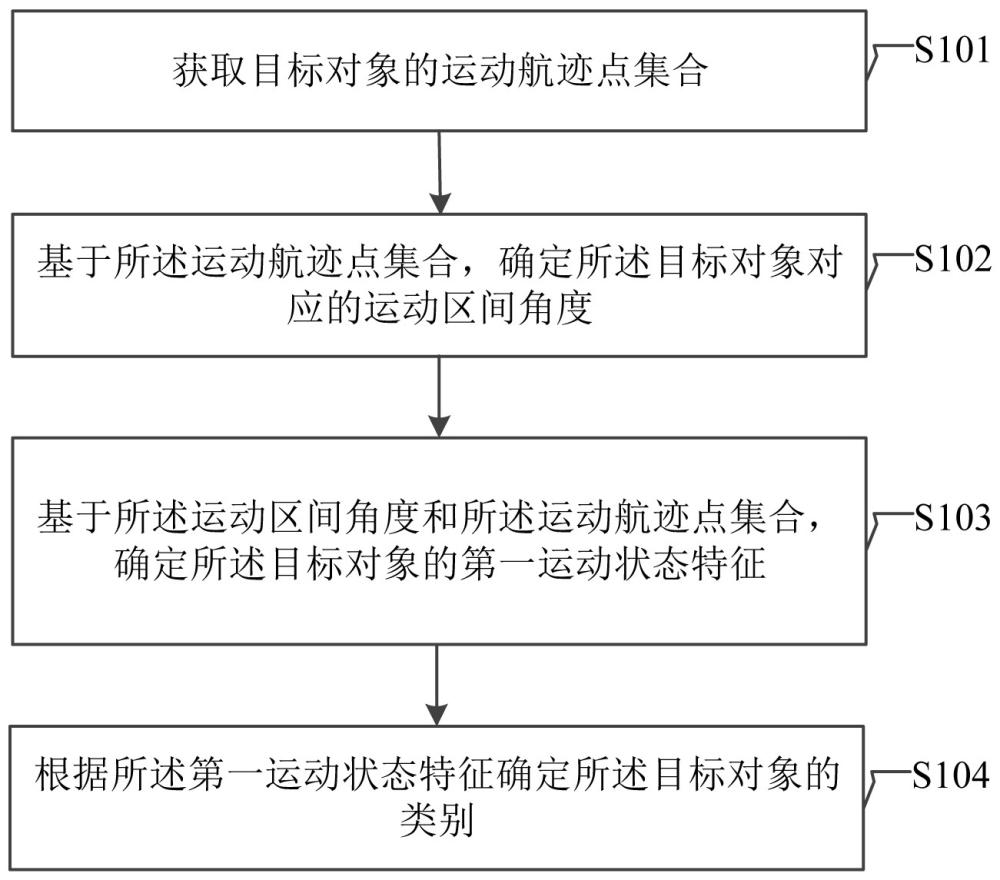
3、獲取目標對象的運動航跡點集合;
4、基于所述運動航跡點集合,確定所述目標對象對應的運動區間角度;
5、基于所述運動區間角度和所述運動航跡點集合,確定所述目標對象的第一運動狀態特征;
6、根據所述第一運動狀態特征確定所述目標對象的類別。
7、在一可實施方式中,所述基于所述運動航跡點集合,確定所述目標對象對應的運動區間角度,包括:
8、采用如下公式,基于所述運動航跡點集合,確定所述目標對象對應的運動區間角度:
9、
10、其中,為目標對象對應的運動區間角度,r為目標對象的運動距離,r為目標對象對應的航跡點之間的最大距離。
11、在一可實施方式中,所述基于所述運動區間角度和所述運動航跡點集合,確定所述目標對象的第一運動狀態特征,包括:
12、確定所述運動區間角度對應的航跡點區間;
13、計算所述航跡點區間內各個航跡點之間的多普勒速度特征;
14、確定多個所述多普勒速度特征中是否存在滿足預設多普勒條件的多普勒速度特征;
15、如果存在,將所述目標對象滿足所述預設多普勒條件的特征確定為所述目標對象的第一運動狀態特征;
16、如果不存在,將所述目標對象不滿足所述預設多普勒條件的特征確定為所述目標對象的第一運動狀態特征。
17、在一可實施方式中,所述計算所述航跡點區間內各個航跡點之間的多普勒速度特征,包括:
18、采用如下公式,計算所述航跡點區間內各個航跡點之間的多普勒速度特征:
19、
20、其中,th為航跡點區間內兩個航跡點之間的多普勒速度特征,=,為航跡點區間內航跡點1的多普勒速度,為航跡點區間內航跡點2的多普勒速度,,,為目標對象的橫向運動速度,為目標對象的縱向運動速度,為運動區間角度,為航跡點區間內兩個航跡點的方位角之間的差值。
21、在一可實施方式中,所述根據所述第一運動狀態特征確定所述目標對象的類別,包括:
22、基于所述運動航跡點集合確定所述目標對象對應的初始分類結果;
23、基于所述初始分類結果和所述第一運動狀態特征確定所述目標對象的目標類別。
24、在一可實施方式中,所述基于所述運動航跡點集合確定所述目標對象對應的初始分類結果,包括:
25、獲取所述目標對象對應的連續第一預設數量的運動航跡幀;
26、確定每個運動航跡幀對應的目標對象尺寸信息和運動點跡數量;
27、確定目標對象尺寸信息滿足預設尺寸閾值且所述運動點跡數量大于預設點跡數量的運動航跡幀的數量是否大于第二預設數量;
28、如果否,確定所述目標對象對應的運動航跡置信度和運動距離;
29、基于所述運動航跡置信度和所述運動距離,確定所述目標對象對應的初始分類結果。
30、在一可實施方式中,所述方法還包括:
31、如果所述目標對象尺寸信息滿足預設尺寸閾值且所述運動點跡數量大于預設點跡數量的運動航跡幀的數量大于所述第二預設數量,確定所述目標對象的類別為第一類別,將所述第一類別作為初始分類結果。
32、在一可實施方式中,所述方法還包括:
33、所述基于所述運動航跡置信度和所述運動距離,確定所述目標對象對應的初始分類結果,包括:
34、如果所述運動距離滿足預設距離閾值且所述運動航跡置信度小于第一預設置信度閾值,確定所述目標對象的類別為第二類別,將所述第二類別作為初始分類結果;
35、如果所述運動航跡置信度大于第二預設置信度閾值,確定所述目標對象的類別為第三類別,將所述第三類別作為初始分類結果;
36、如果所述運動航跡置信度大于等于第一預設置信度閾值且小于等于所述第二預設置信度閾值,確定所述目標對象的類別為第四類別,將所述第四類別作為初始分類結果,所述第一類別、所述第二類別、所述第三類別和所述第四類別均不相同。
37、在一可實施方式中,所述基于所述初始分類結果和所述第一運動狀態特征確定所述目標對象的目標類別,包括:
38、基于所述初始分類結果,獲取目標對象的運動速度;
39、根據所述第一運動狀態特征、所述運動速度和所述運動航跡置信度,確定所述目標對象的目標類別。
40、根據本公開的第二方面,提供了一種目標分類裝置,所述裝置包括:
41、航跡信息獲取模塊,用于獲取目標對象的運動航跡點集合;
42、區間角度確定模塊,用于基于所述運動航跡點集合,確定所述目標對象對應的運動區間角度;
43、特征確定模塊,用于基于所述運動區間角度和所述運動航跡點集合,確定所述目標對象的第一運動狀態特征;
44、分類模塊,用于根據所述第一運動狀態特征確定所述目標對象的類別。
45、根據本公開的第三方面,提供了一種電子設備,包括:
46、至少一個處理器;以及
47、與所述至少一個處理器通信連接的存儲器;其中,
48、所述存儲器存儲有可被所述至少一個處理器執行的指令,所述指令被所述至少一個處理器執行,以使所述至少一個處理器能夠執行本公開所述的方法。
49、根據本公開的第四方面,提供了一種存儲有計算機指令的非瞬時計算機可讀存儲介質,所述計算機指令用于使所述計算機執行本公開所述的方法。
50、本公開的目標分類方法及裝置,獲取目標對象的運動航跡點集合,基于運動航跡點集合,確定目標對象對應的運動區間角度,基于運動區間角度和運動航跡點集合,確定目標對象的第一運動狀態特征,根據第一運動狀態特征確定目標對象的類別。即可以在不依賴性能過高的雷達的情況下,通過目標對象的運動航跡點集合提取目標對象的第一運動狀態特征,利用第一運動狀態特征分析出目標對象的類別,提高了目標分類的準確率。
51、應當理解,本部分所描述的內容并非旨在標識本公開的實施例的關鍵或重要特征,也不用于限制本公開的范圍。本公開的其它特征將通過以下的說明書而變得容易理解。
技術特征:
1.一種目標分類方法,其特征在于,所述方法包括:
2.根據權利要求1所述的方法,其特征在于,所述基于所述運動航跡點集合,確定所述目標對象對應的運動區間角度,包括:
3.根據權利要求1所述的方法,其特征在于,所述基于所述運動區間角度和所述運動航跡點集合,確定所述目標對象的第一運動狀態特征,包括:
4.根據權利要求3所述的方法,其特征在于,所述計算所述航跡點區間內各個航跡點之間的多普勒速度特征,包括:
5.根據權利要求4所述的方法,其特征在于,所述根據所述第一運動狀態特征確定所述目標對象的類別,包括:
6.根據權利要求5所述的方法,其特征在于,所述基于所述運動航跡點集合確定所述目標對象對應的初始分類結果,包括:
7.根據權利要求6所述的方法,其特征在于,所述方法還包括:
8.根據權利要求6所述的方法,其特征在于,所述基于所述運動航跡置信度和所述運動距離,確定所述目標對象對應的初始分類結果,包括:
9.根據權利要求8所述的方法,其特征在于,所述基于所述初始分類結果和所述第一運動狀態特征確定所述目標對象的目標類別,包括:
10.一種目標分類裝置,其特征在于,所述裝置包括:
技術總結
本公開提供了一種目標分類方法、裝置及電子設備,所述方法包括:獲取目標對象的運動航跡點集合,基于運動航跡點集合,確定目標對象對應的運動區間角度,基于運動區間角度和運動航跡點集合,確定目標對象的第一運動狀態特征,根據第一運動狀態特征確定目標對象的類別。采用該方法,提高了目標分類的準確率。
技術研發人員:高廣順,李勇,王明輝
受保護的技術使用者:福思(杭州)智能科技有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!