一種基于三維模型的動(dòng)態(tài)工作輔助系統(tǒng)
本發(fā)明屬于數(shù)據(jù)處理,具體為一種基于三維模型的動(dòng)態(tài)工作輔助系統(tǒng)。
背景技術(shù):
1、目前已有的三維工作手冊大多依賴于傳統(tǒng)的二維圖紙,或者利用cad軟件生成靜態(tài)的三維模型,結(jié)合手冊內(nèi)容進(jìn)行展示。另外一方面在制造、建筑、能源等行業(yè),已出現(xiàn)一些基于數(shù)字孿生技術(shù)的系統(tǒng),這些系統(tǒng)通過虛擬模型來指導(dǎo)設(shè)備的運(yùn)行、維護(hù)和管理。
2、現(xiàn)有技術(shù)中,例如公開號(hào)為cn115687494的專利中記載的技術(shù)方案“一種制造系統(tǒng)的數(shù)字孿生監(jiān)控系統(tǒng),通過實(shí)時(shí)采集生產(chǎn)系統(tǒng)狀態(tài)數(shù)據(jù),并通過信息物理系統(tǒng)總線傳輸數(shù)據(jù),驅(qū)動(dòng)虛擬場景的三維模型,實(shí)現(xiàn)對生產(chǎn)行為的實(shí)時(shí)映射和關(guān)鍵數(shù)據(jù)的可視化。”
3、目前市場上已有的三維工作手冊大多依賴于傳統(tǒng)的二維圖紙,或者通過計(jì)算機(jī)輔助設(shè)計(jì)(cad)軟件生成靜態(tài)的三維模型,并結(jié)合手冊內(nèi)容進(jìn)行展示。這種方法雖然在一定程度上提高了信息的可視化效果,但在實(shí)際應(yīng)用中仍存在一些局限。例如,靜態(tài)三維模型無法實(shí)時(shí)反映系統(tǒng)的動(dòng)態(tài)變化,也無法提供交互式的操作指導(dǎo),往往導(dǎo)致用戶在實(shí)際操作過程中面臨理解和應(yīng)用上的困難。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的目的在于提供一種基于三維模型的動(dòng)態(tài)工作輔助系統(tǒng),以解決背景技術(shù)中提出的現(xiàn)有技術(shù)中,三維手冊未能與設(shè)備的實(shí)時(shí)狀態(tài)、傳感器數(shù)據(jù)等進(jìn)行有效整合,只支持基礎(chǔ)的查看功能,缺少針對用戶操作的動(dòng)態(tài)反饋的問題。
2、為解決上述技術(shù)問題,本發(fā)明所采用的技術(shù)方案是:
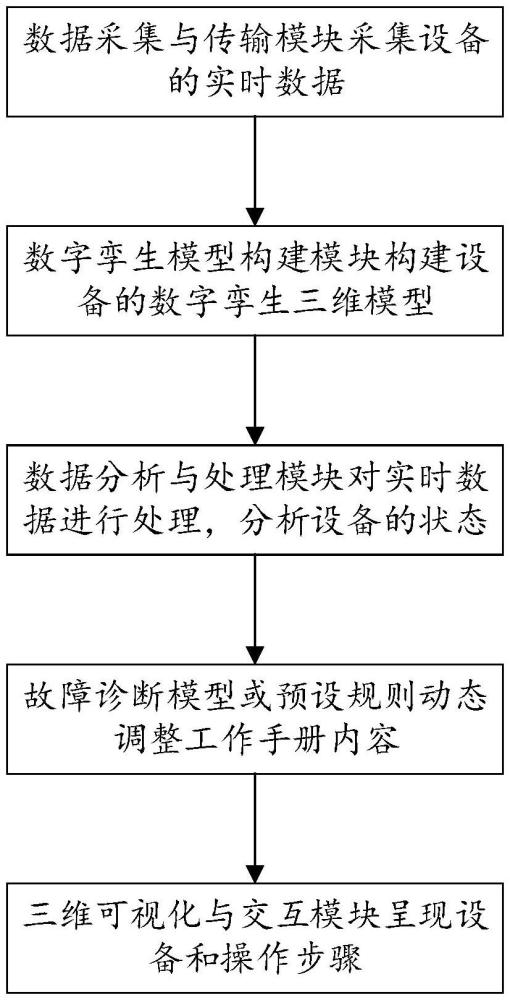
3、一種基于三維模型的動(dòng)態(tài)工作輔助系統(tǒng),包括數(shù)據(jù)采集與傳輸模塊、數(shù)字孿生模型構(gòu)建模塊、數(shù)據(jù)分析與處理模塊以及三維可視化與交互模塊;其中,通過數(shù)據(jù)采集與傳輸模塊采集設(shè)備的實(shí)時(shí)數(shù)據(jù),并將實(shí)時(shí)數(shù)據(jù)傳輸?shù)较到y(tǒng)后臺(tái);系統(tǒng)后臺(tái)將收集的設(shè)備數(shù)據(jù)傳輸給數(shù)字孿生模型構(gòu)建模塊,數(shù)字孿生模型構(gòu)建模塊構(gòu)建設(shè)備的數(shù)字孿生三維模型,并實(shí)時(shí)反映設(shè)備的狀態(tài);
4、數(shù)據(jù)分析與處理模塊對實(shí)時(shí)數(shù)據(jù)進(jìn)行處理,分析設(shè)備的狀態(tài),并根據(jù)故障診斷模型或預(yù)設(shè)規(guī)則動(dòng)態(tài)調(diào)整工作手冊內(nèi)容;
5、三維可視化與交互模塊基于三維模型呈現(xiàn)設(shè)備和操作步驟,支持用戶交互操作,根據(jù)用戶選擇提供即時(shí)反饋。
6、根據(jù)上述技術(shù)方案,數(shù)字孿生模型構(gòu)建模塊構(gòu)建設(shè)備的數(shù)字孿生三維模型具體為:
7、步驟s101,模型初始化:基于通過數(shù)據(jù)采集與傳輸模塊采集設(shè)備cad文件或點(diǎn)云數(shù)據(jù),建立設(shè)備的初始三維模型;
8、步驟s102,實(shí)時(shí)狀態(tài)映射:根據(jù)采集的設(shè)備實(shí)時(shí)數(shù)據(jù),動(dòng)態(tài)更新三維模型的狀態(tài);設(shè)備幾何形狀和屬性參數(shù)的映射關(guān)系如下:
9、m(t)=f(p(t),d(t))
10、式中,m(t)表示三維模型在時(shí)間t的狀態(tài),p(t)表示設(shè)備的幾何參數(shù);d(t)表示設(shè)備的物理參數(shù),f表示映射函數(shù);
11、步驟s103,實(shí)時(shí)狀態(tài)更新:基于物理仿真引擎,實(shí)時(shí)計(jì)算模型的動(dòng)態(tài)行為;
12、步驟s104,態(tài)位置變化:根據(jù)傳感器提供的運(yùn)動(dòng)數(shù)據(jù),使用剛體動(dòng)力學(xué)公式計(jì)算:
13、
14、式中,描述了物體在時(shí)間間隔δt內(nèi)的位移,δt表示時(shí)間間隔,x(t)的表示物體在時(shí)刻t的位置,代表初始位置;v(t)是時(shí)刻在t的速度,a(t)表示物體在t的加速度;
15、步驟s105,狀態(tài)顏色編碼:使用實(shí)時(shí)數(shù)據(jù)對模型進(jìn)行可視化編碼。
16、根據(jù)上述技術(shù)方案,通過故障斷模型或預(yù)設(shè)規(guī)則動(dòng)態(tài)調(diào)整工作手冊內(nèi)容具體為:
17、首先使用機(jī)器學(xué)習(xí)模型分析數(shù)據(jù)流,檢測設(shè)備異常;
18、
19、式中,s(x1)異常得分,h(x)路徑長度;c(n)設(shè)備運(yùn)行路徑的參考長度,即正常工作路徑的歷史均值;通過對設(shè)備實(shí)時(shí)路徑長度與歷史參考路徑長度的對比,判斷當(dāng)前運(yùn)行狀態(tài)是否異常;具體來說,e(h(x)當(dāng)較大時(shí),意味著平均路徑長度較長,表示設(shè)備運(yùn)行存在異常情況,從而導(dǎo)致s(x)較大,即異常得分較高;
20、動(dòng)態(tài)調(diào)整工作手冊內(nèi)容,使用規(guī)則引擎對設(shè)備故障進(jìn)行診斷,并動(dòng)態(tài)調(diào)整工作手冊內(nèi)容;
21、規(guī)則引擎公式:
22、if(t>tthreshold)∧(p<pthreshold)
23、式中,t表示溫度;p表示壓力;
24、動(dòng)態(tài)內(nèi)容生成:根據(jù)診斷結(jié)果,從數(shù)據(jù)庫中動(dòng)態(tài)調(diào)用對應(yīng)的操作步驟,更新到工作手冊。
25、根據(jù)上述技術(shù)方案,三維可視化與交互模塊基于三維模型呈現(xiàn)設(shè)備和操作步驟具體為:
26、實(shí)時(shí)設(shè)備狀態(tài)展示:系統(tǒng)將數(shù)字孿生模型與實(shí)時(shí)數(shù)據(jù)結(jié)合,呈現(xiàn)設(shè)備的動(dòng)態(tài)狀態(tài);使用材質(zhì)和紋理更新模型表面,直觀反映設(shè)備狀態(tài);
27、動(dòng)態(tài)操作步驟聯(lián)動(dòng):根據(jù)工作手冊的動(dòng)態(tài)內(nèi)容更新,三維模型同步顯示操作步驟;通過動(dòng)畫和引導(dǎo)箭頭,指示用戶操作流程;
28、用戶輸入與反饋:支持用戶通過觸摸屏、鼠標(biāo)或語音對模型進(jìn)行交互:點(diǎn)擊部件高亮顯示詳細(xì)信息;拖動(dòng)模型旋轉(zhuǎn)或縮放,查看不同角度;
29、反饋更新:用戶完成每一步操作后,系統(tǒng)記錄操作日志,并實(shí)時(shí)更新下一步指導(dǎo)內(nèi)容。
30、根據(jù)上述技術(shù)方案,數(shù)據(jù)采集與傳輸模塊中,通過實(shí)時(shí)數(shù)據(jù)傳輸接口,將設(shè)備的運(yùn)行狀態(tài)實(shí)時(shí)反饋至數(shù)字孿生三維模型中,數(shù)字孿生三維模型根據(jù)這些信息自動(dòng)調(diào)整手冊中的步驟或圖示,具體調(diào)整機(jī)制:
31、故障診斷與規(guī)則匹配:使用基于規(guī)則的故障診斷模型或數(shù)據(jù)驅(qū)動(dòng)的深度學(xué)習(xí)模型分析設(shè)備狀態(tài)。
32、狀態(tài)步驟映射:將診斷結(jié)果與預(yù)設(shè)步驟庫進(jìn)行映射;
33、s=f(d)
34、式中,s:工作手冊中的步驟,d:設(shè)備診斷狀態(tài);
35、動(dòng)態(tài)內(nèi)容調(diào)整算法:系統(tǒng)根據(jù)設(shè)備當(dāng)前狀態(tài),動(dòng)態(tài)篩選相關(guān)步驟;
36、動(dòng)態(tài)更新步驟邏輯:supdated={s1,s3,s5}
37、式中,supdated:更新后的步驟序列;
38、圖示調(diào)整:使用動(dòng)態(tài)模板生成三維圖示;圖示生成算法:
39、iupdated=g(m,supdated)
40、式中,iupdated表示更新后的三維圖示;m表示數(shù)字孿生模型的狀態(tài)數(shù)據(jù);
41、動(dòng)態(tài)更新機(jī)制的具體實(shí)現(xiàn)步驟:系統(tǒng)調(diào)用規(guī)則引擎,將設(shè)備狀態(tài)與操作步驟匹配;提取適配的步驟序列,調(diào)整操作指導(dǎo)內(nèi)容;
42、三維圖示動(dòng)態(tài)生成:調(diào)用圖示生成模塊,依據(jù)當(dāng)前狀態(tài)生成與步驟相關(guān)的三維可視化圖示;
43、實(shí)時(shí)推送更新:將更新后的工作手冊內(nèi)容和圖示通過交互界面展示給用戶。
44、根據(jù)上述技術(shù)方案,數(shù)據(jù)分析與處理模塊中,通過使用卡爾曼濾波算法對傳感器數(shù)據(jù)進(jìn)行去噪及平滑處理,并融合來自不同傳感器的異構(gòu)數(shù)據(jù)。
45、根據(jù)上述技術(shù)方案,卡爾曼濾波算法具體為:
46、
47、其中,kk為卡爾曼增益,zk為觀測值,為預(yù)測值。
48、根據(jù)上述技術(shù)方案,設(shè)備的狀態(tài)變化通過設(shè)備狀態(tài)同步算法來表示,設(shè)備狀態(tài)同步算法具體為:
49、x(t)=ax(t-1)+bu(t)+w(t)
50、其中,xk為設(shè)備在時(shí)刻t的狀態(tài)向量,u(t)為控制輸入,w(t)為噪聲向量,a為狀態(tài)轉(zhuǎn)移矩陣,b為控制矩陣,表示控制輸入對設(shè)備狀態(tài)的影響。
51、與現(xiàn)有技術(shù)相比,本發(fā)明具有以下有益效果:
52、本發(fā)明中,通過數(shù)據(jù)采集與傳輸模塊,系統(tǒng)能夠?qū)崟r(shí)獲取設(shè)備的運(yùn)行狀態(tài),并通過數(shù)字孿生模型實(shí)時(shí)反映設(shè)備的狀態(tài),助力操作人員及時(shí)了解設(shè)備狀況,數(shù)據(jù)分析與處理模塊能夠?qū)υO(shè)備狀態(tài)進(jìn)行深入分析,及早發(fā)現(xiàn)潛在故障,并通過調(diào)整工作手冊內(nèi)容來指導(dǎo)操作人員采取相應(yīng)措施,從而降低故障發(fā)生率,提高設(shè)備的可靠性和安全性。三維可視化與交互模塊將復(fù)雜的數(shù)據(jù)以直觀的三維模型方式呈現(xiàn),用戶能夠更容易理解設(shè)備操作步驟,并根據(jù)自己的實(shí)際需求獲取即時(shí)反饋,提升操作的準(zhǔn)確性和效率。系統(tǒng)根據(jù)實(shí)時(shí)數(shù)據(jù)和故障診斷結(jié)果動(dòng)態(tài)調(diào)整工作手冊內(nèi)容,保證操作人員在執(zhí)行任務(wù)時(shí)使用的是最新、最相關(guān)的信息,從而優(yōu)化工作流程,減少不必要的時(shí)間浪費(fèi)。
- 還沒有人留言評論。精彩留言會(huì)獲得點(diǎn)贊!