基于深度殘差神經網絡的航跡識別方法
本技術的實施例涉及信號處理,特別涉及一種基于深度殘差神經網絡的航跡識別方法。
背景技術:
1、隨著現代社會和技術的快速發展,目標航跡識別與分類已成為各領域中重要的研究課題,準確識別目標類型對于反應速度和決策質量至關重要。傳統的目標航跡識別方法通常依賴于對目標航跡的信息進行提取,比如提取目標航跡的時間、經緯度、速度、轉向、高度等。然而,這些傳統方法往往無法充分挖掘目標航跡數據中的隱性特征,比如目標航跡數據中的深層次運動規律和潛在信息。
2、深度神經網絡近年來在目標航跡識別領域取得了顯著的成果。然而,目前已提出的深度學習方法面臨目標航跡特征提取不充分,不同類型目標航跡規律復雜多變,深度神經學習網絡梯度爆炸等問題,從而導致航跡識別精度受到一定限制。
技術實現思路
1、有鑒于此,本技術的實施例提出了一種基于深度殘差神經網絡的航跡識別方法,使用深度殘差神經網絡來深度挖掘目標航跡數據的隱性特征,顯著提升了航跡識別的精度與效率,滿足各種應用場景對于航跡識別精度的高要求。
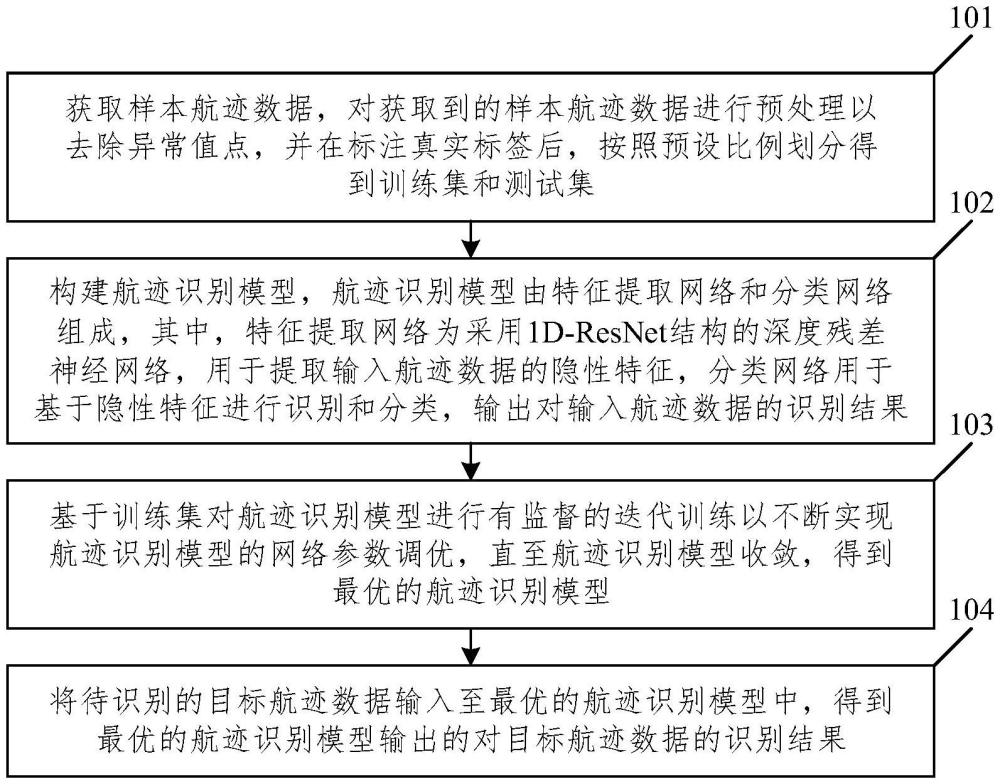
2、第一方面,本技術的實施例提出了一種基于深度殘差神經網絡的航跡識別方法,包括以下步驟:獲取樣本航跡數據,對獲取到的樣本航跡數據進行預處理以去除異常值點,并在標注真實標簽后,按照預設比例劃分得到訓練集和測試集;構建航跡識別模型,航跡識別模型由特征提取網絡和分類網絡組成;其中,特征提取網絡為采用1d-resnet結構的深度殘差神經網絡,用于提取輸入航跡數據的隱性特征,分類網絡用于基于隱性特征進行識別和分類,輸出對輸入航跡數據的識別結果;基于訓練集對航跡識別模型進行有監督的迭代訓練以不斷實現航跡識別模型的網絡參數調優,直至航跡識別模型收斂,得到最優的航跡識別模型;將待識別的目標航跡數據輸入至最優的航跡識別模型中,得到最優的航跡識別模型輸出的對目標航跡數據的識別結果。
3、可選地,所述對獲取到的樣本航跡數據進行預處理以去除異常值點,包括:將樣本航跡數據中的在預設短時間內突然跳躍至遠離軌跡的預設范圍位置的數據點確定為野點,并將所有野點剔除;對樣本航跡數據中缺失位置信息和/或速度信息的數據點,利用插值法,基于鄰近時刻的數據點的位置信息和/或速度信息進行數據填補;將樣本航跡數據中的在預設時間內的速度信息連續為0的各數據點確定為靜止點,并將所有靜止點剔除。野點、數據缺失的數據點和靜止點都屬于樣本航跡數據中的異常值點,數據缺失的數據點可以通過鄰近數據點的數據進行插值補救,野點屬于重大錯誤數據,需要直接剔除以避免對后續的模型訓練產生不利影響,靜止點也可能會對后續的航跡分析產生不利影響,因此也需要直接剔除,保證樣本航跡數據的質量。
4、可選地,所述特征提取網絡由若干個順序連接的1d殘差塊組成,每個1d殘差塊均由順序連接的1d卷積層、批歸一化層和激活函數層、以及跳躍連接組成,所述跳躍連接的一端連接1d卷積層的輸入,另一端連接激活函數層的輸出。
5、可選地,所述激活函數層采用relu激活函數實現,所述1d殘差塊的輸出通過公式表示為:
6、ya=relu{batchnorm[conv1d(xa,wa)]}+xa;
7、其中,xa表示第a個1d殘差塊的輸入,wa表示可學習的網絡參數,conv1d(·)表示1d卷積層,batchnorm(·)表示批歸一化層,relu(·)表示激活函數層,ya表示第a個1d殘差塊的輸出,最后一個1d殘差塊的輸出即特征提取網絡提取出的隱性特征。
8、可選地,所述分類網絡由順序連接的第一全連接層、第一激活層、第二全連接層、第二激活層和softmax層組成,第一全連接層中設有n1個神經元,第二全連接層中設有n2個神經元,第三全連接層中設有n3個神經元;第一全連接層用于對隱性特征進行加權處理,進一步進行特征提取,第二全連接層用于對第一全連接層輸出的特征進行進一步的特征提取,第三全連接層用于對第二全連接層輸出的特征進行更高階的特征提取,第一激活層和第二激活層用于引入非線性映射能力以使分類網絡學習到更復雜的模式,softmax層用于將第三全連接層輸出的特征轉化為屬于每個類別的概率,得到識別結果。
9、可選地,第一激活層和第二激活層均采用relu激活函數實現,分類網絡輸出的對輸入航跡數據的識別結果,通過公式表示為:
10、yf=fclassifer(rn)=fsoftmax{flinear3[frelu2(flinear2[frelu1(flinear1[rn])])]};
11、其中,rn表示隱性特征,fclassifer(·)表示分類網絡,yf表示識別結果,flinear1(·)表示第一全連接層,frelu1(·)表示第一激活層,flinear2(·)表示第二全連接層,frelu2(·)表示第二激活層,flinear3(·)表示第三全連接層。
12、可選地,所述基于訓練集對航跡識別模型進行有監督的迭代訓練以不斷實現航跡識別模型的網絡參數調優,直至航跡識別模型收斂,得到最優的航跡識別模型,包括:
13、將訓練集中的樣本航跡數據輸入至航跡識別模型中進行有監督的訓練,得到航跡識別模型輸出的對樣本航跡數據的識別結果;
14、利用交叉熵損失函數,計算樣本航跡數據的真實標簽與航跡識別模型輸出的對樣本航跡數據的識別結果之間的損失值;
15、基于損失值,利用反向傳播算法不斷優化調整航跡識別模型的網絡參數,直至航跡識別模型收斂,得到最優的航跡識別模型;
16、利用交叉熵損失函數,計算樣本航跡數據的真實標簽與航跡識別模型輸出的對樣本航跡數據的識別結果之間的損失值,通過公式表示為:
17、
18、其中,c表示批大小,表示第c個樣本航跡數據的真實標簽,yc表示航跡識別模型輸出的對第c個樣本航跡數據的識別結果,loss為計算出的損失值。
19、本技術的實施例提出的一種基于深度殘差神經網絡的航跡識別方法,構建、訓練并使用了航跡識別模型來執行航機識別任務,構建的航跡識別模型由特征提取網絡和分類網絡組成,特征提取網絡為采用1d-resnet結構的深度殘差神經網絡,這樣的特征提取網絡能夠深入挖掘輸入航跡數據的深層隱性特征,充分挖掘輸入航跡數據的運動學規律,分類網絡則基于隱性特征進行識別和分類,最終輸出對輸入航跡數據的識別結果。在訓練模型時使用的樣本航跡數據需要經過預處理以去除異常值點,這樣的樣本航跡數據科學、可靠且無污染,可以高質量地訓練航跡識別模型。此外,采用1d-resnet結構的深度殘差神經網絡還能很好地克服傳統深度神經網絡中存在的梯度消失和梯度爆炸問題,從而顯著提升了航跡識別的精度、效率和穩定性,滿足各種應用場景對于航跡識別精度的高要求。
20、第二方面,本技術的實施例提出了一種基于深度殘差神經網絡的航跡識別系統,所述系統包括:樣本劃分模塊,用于獲取樣本航跡數據,對獲取到的樣本航跡數據進行預處理以去除異常值點,并在標注真實標簽后,按照預設比例劃分得到訓練集和測試集;模型構建模塊,用于構建航跡識別模型,航跡識別模型由特征提取網絡和分類網絡組成,其中,特征提取網絡為采用1d-resnet結構的深度殘差神經網絡,用于提取輸入航跡數據的隱性特征,分類網絡用于基于隱性特征進行識別和分類,輸出對輸入航跡數據的識別結果;模型訓練模塊,用于基于訓練集對航跡識別模型進行有監督的迭代訓練以不斷實現航跡識別模型的網絡參數調優,直至航跡識別模型收斂,得到最優的航跡識別模型;模型使用模塊,用于將待識別的目標航跡數據輸入至最優的航跡識別模型中,得到最優的航跡識別模型輸出的對目標航跡數據的識別結果。
21、可以理解的是,上述第二方面的有益效果可以參見上述第一方面中的相關描述,在此不再贅述。
- 還沒有人留言評論。精彩留言會獲得點贊!