一種多聚焦圖像對齊的方法、系統、計算機可讀存儲介質及計算機程序產品與流程
本發明涉及圖像處理,尤其涉及一種多聚焦圖像對齊的方法、系統、計算機可讀存儲介質及計算機程序產品。
背景技術:
1、隨著數字圖像處理技術的迅猛發展,多聚焦圖像融合成為了圖像處理領域的重要研究方向。多聚焦圖像融合技術通常用于將一系列焦點不同的圖像合成一張景深更廣的圖像。這一技術的核心是通過改變焦距采集不同焦點區域的多聚焦圖像,合并圖像使得最終的融合圖像能夠包含所有圖像中的清晰細節,從而實現比單一圖像更高的景深和更廣的清晰范圍。
2、常見的焦距調整方法包括使用液態鏡頭改變屈光度以快速調節焦距,或使用運動機構與定焦鏡頭改變對焦距離等。然而,這些方法可能引發圖像放大倍率變化、視野偏差等問題,導致圖像之間幾何關系錯位。在進行圖像融合時,圖像之間的幾何關系錯位會造成最終的融合圖像出現邊緣模糊及錯位的問題。因此,如何在圖像融合前實現精準對齊是該技術領域的關鍵問題。
3、目前,圖像對齊技術廣泛應用于圖像拼接、圖像配準等領域,但大多數方法并未考慮到多聚焦圖像中焦距變化帶來的幾何變形。傳統的圖像對齊方法一般依賴于特征點匹配。該方法在一些簡單情況下,如景深變化較小、紋理清晰的圖像對齊中能夠有效工作,但在面對景深變化較大或者圖像紋理不清晰時,常常出現匹配不準確、錯位或失真的問題。
4、同時基于特征匹配的圖像對齊方法在特征提取和匹配過程中通常需要較長的時間,尤其是當圖像尺寸較大或特征點較多時。例如,sift、surf等算法在高分辨率圖像中提取特征點并進行匹配時,計算量非常大,且匹配過程可能涉及到大量的計算和存儲資源,導致對齊過程的效率低下。
技術實現思路
1、本發明的目的在于提供一種多聚焦圖像對齊的方法、系統、計算機可讀存儲介質及計算機程序產品,以解決或至少部分解決上述背景技術中提及的技術問題。
2、為達此目的,本發明采用以下技術方案:
3、第一方面,本發明提供了一種多聚焦圖像對齊的方法,包括:
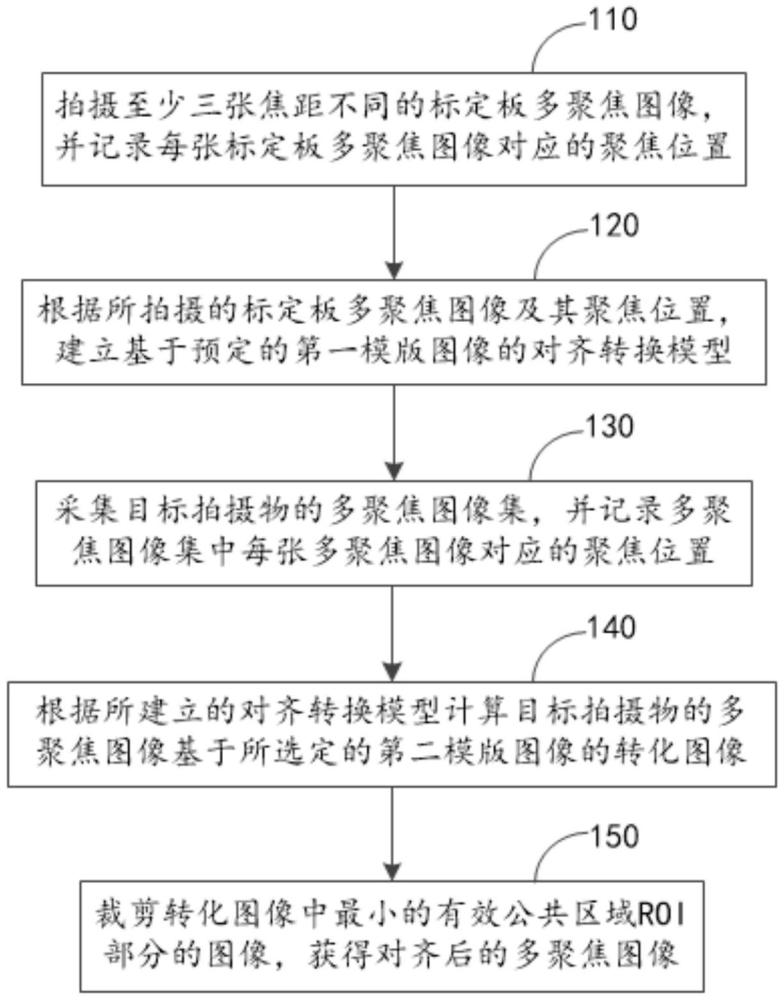
4、拍攝至少三張焦距不同的標定板多聚焦圖像,并記錄每張標定板多聚焦圖像對應的聚焦位置;
5、根據所拍攝的標定板多聚焦圖像及其聚焦位置,建立基于預定的第一模版圖像的對齊計算模型;其中,所述第一模版圖像為所述至少三張焦距不同的標定板多聚焦圖像中的一張圖像;
6、采集目標拍攝物的多聚焦圖像集,并記錄多聚焦圖像集中每張多聚焦圖像對應的聚焦位置;
7、根據所建立的對齊計算模型,計算目標拍攝物的多聚焦圖像基于所選定的第二模版圖像的轉化圖像;其中,所述第二模版圖像為多聚焦圖像集中的一張圖像;
8、裁剪轉化圖像中最小的有效公共區域roi,獲得對齊后的多聚焦圖像。
9、可選地,所述根據所拍攝的標定板多聚焦圖像及其聚焦位置,建立基于預定的第一模版圖像的對齊計算模型,具體包括:
10、設標定板多聚焦圖像表示為si,第一模版圖像表示為sr,si對應的聚焦位置為gi;其中,i,r為標定板多聚焦圖像的序號;
11、利用ecc算法計算si與sr的仿射變換矩陣mi;mi及對齊計算模型分別表達為:
12、s′i(x,y)=f[si(x,y),gi,g0];
13、其中,si’表示si通過對齊計算模型轉換后得到的圖像;
14、利用最小二乘法找到gi與mi之間的關系,表達為:
15、a11=f1(gi),a12=f2(gi),a13=f3(gi),a21=f4(gi),a22=f5(gi),a23=f6(gi);
16、其中,f1、f2、f3、f4、f5和f6是根據gi得到的函數;
17、將所述對齊計算模型變換為:
18、
19、其中,[x,y]是需對齊的多聚焦圖像中的像素坐標,[x′,y′]是轉化圖像中的像素坐標。
20、可選地,所述根據所拍攝的標定板多聚焦圖像及其聚焦位置,建立基于預定的第一模版圖像的對齊計算模型,具體包括:
21、設標定板多聚焦圖像表示為si,第一模版圖像表示為sr,si對應的聚焦位置為gi;其中,i,r為標定板多聚焦圖像的序號;
22、利用標定板上參考點坐標的變換計算對應的仿射變換矩陣mi;其中,所述參考點坐標為圓心或角點坐標;
23、仿射變換矩陣的計算方法具體包括:
24、若所述參考點坐標選定為圓心坐標,通過霍夫找圓算法,獲取多聚焦圖像si中所有的圓心坐標;圓心坐標記為(xij,yij),i為標定板多聚焦圖像的序號,j為視野中圓心的序號;
25、設定仿射變換矩陣mi為:
26、
27、將sr的第j個圓心坐標(xrj,yrj)映射到其他的標定板多聚焦圖像si上的第j個圓心坐標(xij,yij),建立如下坐標映射方程:
28、
29、對于每一個標定板多聚焦圖像,通過坐標映射方程可獲得j個坐標映射方程,構建坐標映射方程組;
30、通過求解坐標映射方程組,得到mi中的參數a11、a12、a13、a21、a22和a23;
31、利用最小二乘法找到gi與mi中的參數之間關系,表達為:
32、a11=f1(gi),a12=f2(gi),a13=f3(gi),a21=f4(gi),a22=f5(gi),a23=f6(gi);
33、其中,f1、f2、f3、f4、f5和f6是根據gi得到的函數;
34、再將所述對齊計算模型變換為:
35、
36、其中,[x,y]是需對齊的多聚焦圖像中的像素坐標,[x′,y′]是轉化圖像中的像素坐標。
37、可選地,所述拍攝至少三張焦距不同的標定板多聚焦圖像,并記錄每張標定板多聚焦圖像對應的聚焦位置,具體包括:
38、將相機固定于預定的第一拍攝位置,并對準標定板;其中,所述相機配備有能受控調節屈光度的液態鏡頭;
39、控制液態鏡頭調節不同的屈光度,通過相機拍攝得到所述至少三張焦距不同的標定板多聚焦圖像,并記錄每張標定板多聚焦圖像對應的屈光度。
40、可選地,si對應的聚焦位置gi表達為:
41、gi=△dpti=dpti-dptr;其中,dpti為所記錄的si對應的屈光度,dptr為所述第一模版圖像對應的屈光度;
42、△dpti和仿射變換矩陣mi中元素是線性關系,該線性關系表達為:
43、aij=k×△dpti+b;
44、對于仿射變換矩陣mi每個元素aij,最小化以下誤差平方和后,通過最小二乘法擬合得到k和b;誤差平方和以及k、b的計算公式分別表達為;
45、誤差平方和表達為:
46、
47、k的計算公式為:
48、
49、b的計算公式為:
50、
51、可選地,所述根據所拍攝的標定板多聚焦圖像及其聚焦位置,建立基于預定的第一模版圖像的對齊計算模型之前,還包括:
52、選擇最清晰的標定板多聚焦圖像作為所述第一模版圖像。
53、可選地,所述采集目標拍攝物的多聚焦圖像集,并記錄多聚焦圖像集中每張多聚焦圖像對應的聚焦位置,具體包括:
54、將相機固定于預定的第二拍攝位置,并對準目標拍攝物;
55、控制液態鏡頭調節不同屈光度,通過相機拍攝得到一組目標拍攝物的多聚焦圖像,并記錄每張多聚焦圖像對應的屈光度;
56、從所獲取的一組目標拍攝物的多聚焦圖像中選定一張圖像作為所述第二模版圖像;
57、設目標拍攝物的多聚焦圖像為pk,所述第二模版圖像為ps,pk對應的聚焦位置gk表達為:
58、gk=△dptk=dptk-dpts;其中,dptk為所記錄的pk對應的屈光度,dpts為所述第二模版圖像對應的屈光度;k,s為目標拍攝物的多聚焦圖像的序號;
59、所述根據所建立的對齊計算模型,計算目標拍攝物的多聚焦圖像基于所選定的第二模版圖像的轉化圖像,具體為:
60、通過所建立的對齊計算模型,對目標拍攝物的多聚焦圖像pk進行轉化,得到多聚焦圖像pk基于所述第二模版圖像的轉化圖像p′k。
61、可選地,所述裁剪轉化圖像中最小的有效公共區域roi,獲得對齊后的多聚焦圖像,具體包括:
62、計算所有轉化圖像中的roi區域;
63、求取所有的roi區域的交集,獲取最小的有效公共區域roicommon;
64、分別裁剪各轉化圖像中的roicommon部分的圖像,獲得各轉化圖像對齊后的多聚焦圖像。
65、可選地,轉化圖像中的roi區域的計算方法具體包括:
66、將轉化圖像p′k轉換為相應的灰度圖g′k,并基于灰度圖g′k的大小設定roi區域的初始邊界,限定初始搜索區域的范圍;
67、通過二值化將灰度圖g′k轉換為掩碼,并基于掩碼計算灰度圖g′k中每個像素點的八鄰域零值像素的數量,確定roi區域的邊界,獲得轉化圖像p′k的roi區域;
68、所述裁剪所述轉化圖像中的roi部分的圖像,獲得對齊后的多聚焦圖像,具體包括:
69、對于每個圖像p′k,裁剪roicommon內的部分,生成對齊后的多聚焦圖像p″k,即:
70、p″k=pk(roicommon)。
71、可選地,所述標定板為圓形標定板或棋盤格標定板。
72、可選地,所述目標拍攝物為銑刀。
73、第二方面,本發明提供了一種多聚焦圖像對齊的系統,包括:
74、拍攝組件,用于拍攝至少三張焦距不同的標定板多聚焦圖像;
75、存儲單元,電連接所述拍攝組件,用于存儲所拍攝的標定板多聚焦圖像,以及所記錄的每張標定板多聚焦圖像對應的聚焦位置;
76、模型構建單元,用于電連接所述存儲單元,用于根據所拍攝的標定板多聚焦圖像及其聚焦位置,建立基于預定的第一模版圖像的對齊計算模型;其中,所述第一模版圖像為所述至少三張焦距不同的標定板多聚焦圖像中的一張圖像;
77、所述拍攝組件,還用于拍攝目標拍攝物的多聚焦圖像集;所述存儲單元,還用于存儲所拍攝的多聚焦圖像集,以及所記錄的多聚焦圖像集中每張多聚焦圖像對應的聚焦位置;
78、圖像對齊計算單元,電連接所述存儲單元,用于根據所建立的對齊計算模型,計算目標拍攝物的多聚焦圖像基于所選定的第二模版圖像的轉化圖像;其中,所述第二模版圖像為多聚焦圖像集中的一張圖像;
79、圖像裁剪單元,電連接所述圖像對齊計算單元,用于裁剪轉化圖像中最小的有效公共區域roi,獲得對齊后的多聚焦圖像。
80、可選地,所述對齊計算模型的構建方法具體包括:
81、設標定板多聚焦圖像表示為si,第一模版圖像表示為sr,si對應的聚焦位置為gi;其中,i,r為標定板多聚焦圖像的序號;
82、利用ecc算法計算si與sr的仿射變換矩陣mi;mi及對齊計算模型分別表達為:
83、
84、其中,si’表示si通過對齊計算模型轉換后得到的圖像;
85、利用最小二乘法找到gi與mi之間的關系,表達為:
86、a11=f1(gi),a12=f2(gi),a13=f3(gi),a21=f4(gi),a22=f5(gi),a23=f6(gi);
87、其中,f1、f2、f3、f4、f5和f6是根據gi得到的函數;
88、將所述對齊計算模型變換為:
89、
90、其中,[x,y]是需對齊的多聚焦圖像中的像素坐標,[x′,y′]是轉化圖像中的像素坐標。
91、可選地,所述對齊計算模型的構建方法具體包括:
92、設標定板多聚焦圖像表示為si,第一模版圖像表示為sr,si對應的聚焦位置為gi;其中,i,r為標定板多聚焦圖像的序號;
93、利用標定板上參考點坐標的變換計算對應的仿射變換矩陣mi;其中,所述參考點坐標為圓心或角點坐標;
94、仿射變換矩陣的計算方法具體包括:
95、若所述參考點坐標選定為圓心坐標,通過霍夫找圓算法,獲取多聚焦圖像si中所有的圓心坐標;圓心坐標記為(xij,yij),i為標定板多聚焦圖像的序號,j為視野中圓心的序號;
96、設定仿射變換矩陣mi為:
97、
98、將sr的第j個圓心坐標(xrj,yrj)映射到其他的標定板多聚焦圖像si上的第j個圓心坐標(xij,yij),建立如下坐標映射方程:
99、
100、對于每一個標定板多聚焦圖像,通過坐標映射方程可獲得j個坐標映射方程,構建坐標映射方程組;
101、通過求解坐標映射方程組,得到mi中的參數a11、a12、a13、a21、a22和a23;
102、利用最小二乘法找到gi與mi中的參數之間關系,表達為:
103、a11=f1(gi),a12=f2(gi),a13=f3(gi),a21=f4(gi),a22=f5(gi),a23=f6(gi);
104、其中,f1、f2、f3、f4、f5和f6是根據gi得到的函數;
105、再將所述對齊計算模型變換為:
106、
107、其中,[x,y]是需對齊的多聚焦圖像中的像素坐標,[x′,y′]是轉化圖像中的像素坐標。
108、可選地,所述標定板多聚焦圖像的拍攝方法具體為:
109、將相機固定于預定的第一拍攝位置,并對準標定板;其中,所述相機配備有能受控調節屈光度的液態鏡頭;
110、控制液態鏡頭調節不同的屈光度,通過相機拍攝得到所述至少三張焦距不同的標定板多聚焦圖像,并記錄每張標定板多聚焦圖像對應的屈光度。
111、可選地,si對應的聚焦位置gi表達為:
112、gi=△dpti=dpti-dptr;其中,dpti為所記錄的si對應的屈光度,dptr為所述第一模版圖像對應的屈光度;
113、△dpti和仿射變換矩陣mi中元素是線性關系,該線性關系表達為:
114、aij=k×△dpti+b;
115、對于仿射變換矩陣mi每個元素aij,最小化以下誤差平方和后,通過最小二乘法擬合得到k和b;誤差平方和以及k、b的計算公式分別表達為;
116、誤差平方和表達為:
117、
118、k的計算公式為:
119、
120、b的計算公式為:
121、
122、可選地,所述第一模版圖像選定為最清晰的標定板多聚焦圖像。
123、可選地,所述目標拍攝物的多聚焦圖像集的采集方法具體為:
124、將相機固定于預定的第二拍攝位置,并對準目標拍攝物;
125、控制液態鏡頭調節不同屈光度,通過相機拍攝得到一組目標拍攝物的多聚焦圖像,并記錄每張多聚焦圖像對應的屈光度;
126、所述轉化圖像的轉化方法具體為:
127、從所獲取的一組目標拍攝物的多聚焦圖像中選定一張圖像作為所述第二模版圖像;
128、設目標拍攝物的多聚焦圖像為pk,所述第二模版圖像為ps,pk對應的聚焦位置gk表達為:
129、gk=△dptk=dptk-dpts;其中,dptk為所記錄的pk對應的屈光度,dpts為所述第二模版圖像對應的屈光度;k,s為目標拍攝物的多聚焦圖像的序號;
130、所述圖像對齊計算單元通過所建立的對齊計算模型,對目標拍攝物的多聚焦圖像pk進行轉化,得到多聚焦圖像pk基于所述第二模版圖像的轉化圖像pk’。
131、可選地,所述圖像裁剪單元,具體用于:
132、計算所有轉化圖像中的roi區域;
133、求取所有的roi區域的交集,獲取最小的有效公共區域roicommon;
134、裁剪所述轉化圖像中的roicommon部分的圖像,獲得對齊后的多聚焦圖像。可選地,所述計算所有轉化圖像中最小的有效公共區域roi,具體包括:
135、將轉化圖像p′k轉換為相應的灰度圖g′k,并基于灰度圖gk的大小設定roi區域的初始邊界,限定初始搜索區域的范圍;
136、通過二值化將灰度圖g′k轉換為掩碼,并基于掩碼計算灰度圖g′k中每個像素點的八鄰域零值像素的數量,確定roi區域的邊界,獲得轉化圖像p′k的roi區域;
137、所述裁剪所述轉化圖像中的roi部分的圖像,獲得對齊后的多聚焦圖像,具體包括:
138、對于每個圖像p′k,裁剪roicommon內的部分,生成對齊后的多聚焦圖像p″k,即:
139、p″k=pk(roicommon)。
140、可選地,所述標定板為圓形標定板或棋盤格標定板。
141、可選地,所述目標拍攝物為銑刀。
142、第三方面,本發明還提供了一種計算機可讀存儲介質,存儲介質中存儲有至少一條指令,指令由處理器加載并執行以實現如上所述的一種多聚焦圖像對齊的方法。
143、第四方面,本發明還提供了一種計算機程序產品,包括計算機程序/指令,其特征在于,當計算機程序/指令被處理器執行時,實現以上所述的所述的一種多聚焦圖像對齊的方法。
144、與現有技術相比,本發明的有益效果為:
145、本發明提供的一種多聚焦圖像對齊的方法,能夠通過標定建立對齊計算模型,克服傳統圖像對齊方法,在面對焦距變化引起的幾何畸變時的不足;該方法在確保對齊精度的同時,還顯著提高了計算效率,避免傳統的特征匹配方法中存在的耗時問題,適用于高分辨率和大規模圖像數據的處理。
- 還沒有人留言評論。精彩留言會獲得點贊!