海洋機器人用多層跨尺度海洋環境場建模方法
本發明屬于環境建模領域。
背景技術:
1、隨著海洋開發和研究的不斷深入,海洋機器人作為執行復雜任務的重要工具,其智能化水平和環境適應能力逐漸成為研究熱點。在實際應用中,海洋機器人常面臨復雜、多變的海洋環境,包括海風、海浪、海流等多種動態因素,這些因素直接影響其航行路徑規劃、任務執行效率及設備安全性。因此,準確構建海洋環境場并對其動態變化進行建模與更新,是提升海洋機器人任務性能的重要研究方向。
2、當前最常見的環境建模方法包括可視圖、voronoi圖和柵格圖,文章《一種基于可視圖法導盲機器人路徑規劃的研究》利用可視圖法對周圍環境進行更加直觀的建模,提高路徑規劃的效率。但是可視圖法的起始點或目標點一旦改變,就要重新構建模型,缺乏靈活性。
3、voronoi圖在建模過程中更側重于障礙物,雖增加了距離但可以保證應用于規劃和避障任務時的安全性。該方法的弊端是voronoi圖的重繪比較費時,不適用大型動態環境。
4、相比之下,柵格法可能更適用于海洋環境場建模,文獻《基于改進蟻群算法的船舶節能航線規劃研究》利用柵格法對海洋環境進行建模,綜合考慮了海風、海浪、海流等因素,為后續的算法規劃提供了更全面的數據支撐。但是該文獻并沒有考慮海洋環境的動態時空變化,所建環境場模型精度還有待提升。
5、此外,海洋環境建模方法還主要依賴于兩類模型數據:一是基于數值模擬的環境場預測數據,二是基于實體環境感知模塊的觀測數據。數值模擬方法如國際天氣預報中心提供的海洋環境預報模型,能夠提供較大范圍的環境場數據,覆蓋海風、海流、海浪等多種要素。然而,其分辨率較低且實時性不足,難以滿足局部任務場景的精細化建模需求。另一方面,實體環境感知模塊的觀測數據雖然具有較高的分辨率和精確性,但僅能覆蓋較小范圍的環境場,且缺乏對環境大范圍動態變化的全局感知能力。此外,現有方法通常僅關注單一尺度的環境場建模,難以在不同尺度間有效銜接與融合,導致在復雜環境條件下對機器人作業的適應性和魯棒性支持不足。
技術實現思路
1、本發明是為了解決海洋機器人在復雜、動態海洋環境中的環境建模精度低的問題,現提供海洋機器人用多層跨尺度海洋環境場建模方法。
2、海洋機器人用多層跨尺度海洋環境場建模方法,包括:
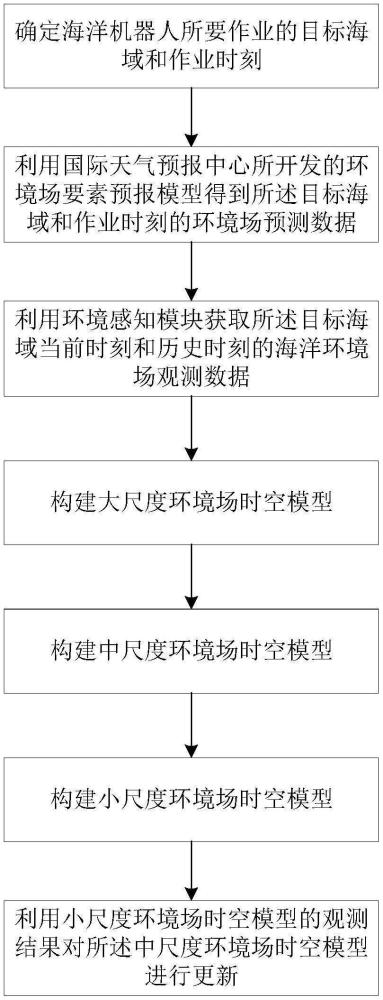
3、在目標海域繪制初始柵格地圖,并將目標海域和作業時刻的環境場預測數據按照地理坐標存儲在所述初始柵格地圖中,得到初級大尺度環境場時空模型,使用三次樣條插值法提高所述初級大尺度環境場時空模型中未來時刻環境場預測數據的時間分辨率,獲得大尺度環境場時空模型,所述環境場預測數據包括:海風、海浪和海流;
4、采用克里金插值法對所述大尺度環境場時空模型進行空間預測獲得空間預測數據,將所述大尺度環境場時空模型中的最小柵格單元作為中尺度區域,并將所述空間預測數據存入所述中尺度區域中,在每個存有空間預測數據的中尺度區域內繪制中尺度柵格地圖,使用三次樣條插值法提高所述中尺度柵格地圖中未來時刻時間預測數據的時間分辨率,獲得中尺度環境場時空模型;
5、將所述中尺度環境場時空模型的最小柵格單元作為小尺度區域,將歷史時刻的海洋環境場觀測數據按照地理位置存儲在各小尺度區域內,使用bp神經網絡模型預測并存儲各小尺度區域內未來時刻的觀測估計數據,將存儲有觀測估計數據的小尺度區域內繪制小尺度柵格地圖,獲得小尺度環境場時空模型。
6、進一步的,上述海洋機器人用多層跨尺度海洋環境場建模方法,還包括:
7、利用時空影響因子對中尺度環境場時空模型中當前和未來時刻各個柵格中的環境場數據進行更新,表達式為:
8、
9、其中,η(m,n,t0)和η(m,n,tf)分別為當前時刻t0和未來時刻tf下的時空影響因子,m和n分別為經度索引和緯度索引;
10、esob(xsob,ysob,t0)為小尺度環境場時空模型中當前時刻t0的海洋環境場觀測數據,xsob和ysob分別表示esob(xsob,ysob,t0)所在小尺度區域內的經度坐標和緯度坐標,
11、為bp神經網絡模型預測的小尺度觀測柵格在未來時刻tf的觀測估計數據,所述小尺度觀測柵格為環境感知模塊所在的小尺度區域內的柵格,
12、為更新后的中尺度環境場時空模型中的環境場預測數據,xm和yn分別表示所在中尺度區域內的經度坐標和緯度坐標,t為時刻索引。
13、進一步的,上述時空影響因子的獲得方法包括:
14、在任意尺度的區域內,將海洋機器人搭載的環境感知模塊所在的柵格作為觀測柵格;
15、采集中尺度區域中(m,n)位置的柵格在歷史時刻t1、t2和t3下的真實環境場數據:emht(xm,yn,t1)、emht(xm,yn,t2)和emht(xm,yn,t3);
16、根據下式計算在歷史時刻t1、t2和t3下的時空影響因子:
17、
18、其中,η(m,n,t1)、η(m,n,t2)和η(m,n,t3)分別為(m,n)位置的柵格在歷史時刻t1、t2和t3下的時空影響因子,
19、emht(xmob,ymob,t1)、emht(xmob,ymob,t2)和emht(xmob,ymob,t3)分別為中尺度觀測柵格在歷史時刻t1、t2和t3下的真實環境場數據,xmob和ymob分別為中尺度觀測柵格的經度坐標和緯度坐標;
20、將歷史時刻t1、t2和t3下的時空影響因子進行線性擬合,得到時空影響因子函數η(m,n,t):
21、
22、m和n分別是經度索引和緯度索引,t是時刻索引。
23、進一步的,上述bp神經網絡模型的輸入為小尺度區域內歷史時刻的海洋環境場觀測數據,輸出為小尺度區域內未來時刻的觀測估計數據。
24、進一步的,上述目標海域和作業時刻的環境場預測數據通過國際天氣預報中心所開發的環境場要素預報模型獲得;
25、所述海洋環境場觀測數據通過海洋機器人搭載的環境感知模塊采集獲得。
26、進一步的,上述大尺度環境場時空模型的尺度范圍為300海里×300海里,空間分辨率為0.125°×0.125°,時間分辨率為1h。
27、進一步的,上述中尺度環境場時空模型的尺度范圍為7.5海里×7.5海里,空間分辨率為1.5′×1.5′,時間分辨率為0.5h。
28、進一步的,上述小尺度環境場時空模型的尺度范圍為1.5海里×1.5海里,空間分辨率為0.1′×0.1′,時間分辨率為0.5h。
29、海洋機器人用的多層跨尺度海洋環境場建模設備,所述預設性能控制設備包括處理器和存儲器,所述存儲器中存儲有至少一條指令,所述至少一條指令由處理器加載并執行以實現如上述海洋機器人用多層跨尺度海洋環境場建模方法。
30、一種計算機存儲介質,所述計算機存儲介質中存儲有至少一條指令,所述至少一條指令由處理器加載并執行以實現如上述海洋機器人用多層跨尺度海洋環境場建模方法。
31、本發明的有益效果是:
32、通過將海洋環境場劃分為大尺度、中尺度和小尺度三類模型,結合分層建模與數據融合方法,顯著提升了模型的精度和適應性。該方法不僅能夠提供廣域的全局視角,幫助海洋機器人掌握目標海域的整體環境,還能針對局部區域進行精細化建模,滿足不同任務場景對環境感知的多樣化需求。此外,不同尺度模型之間實現了高效銜接與融合,為機器人在復雜動態海洋環境下的高效作業提供了全面、精準的環境場數據支持。
33、相比傳統依賴數值預測或單純觀測數據的建模方法,本發明通過實時感知模塊提供真實觀測數據,并更新了中尺度模型,確保模型能夠快速響應海洋環境的變化。這種更新修正機制極大提高了環境場建模的實時性和準確性,進而提升了海洋機器人在作業過程中的穩定性和工作效率。
34、本發明具有廣泛的應用場景,能夠適應各種固定海域和特定時刻下的復雜作業需求。無論是科學勘測、資源開發,還是生態環境監測,都能夠有效發揮其技術優勢。其通用性和實際應用價值為海洋機器人在各類場景中的廣泛使用提供了堅實的技術基礎。
- 還沒有人留言評論。精彩留言會獲得點贊!