道路靜態真值的生成方法和裝置、存儲介質及電子設備與流程
本技術涉及智能駕駛,具體而言,涉及一種道路靜態真值的生成方法和裝置、存儲介質及電子設備。
背景技術:
1、在智能駕駛系統中,感知系統是后續進行決策和控制的基礎環節,包括對周圍物體的檢測、分類、定位和跟蹤等功能。對感知算法評測可以評估算法性能、確保算法安全性和可靠性的關鍵步驟,在評測過程中依賴真值,通過比較真實值與模型預測值的差異得到模型的評測結果。
2、相關技術在生成用于評測模型的道路靜態元素的真值的情況下,通常在三維虛擬特征圖中采用動態匹配算法確定二維標線要素的形狀和位置,以生成標注后的三維特征圖。然而,在三維空間中標注點云,過程比較繁瑣,需要消耗較多的資源。換言之,相關技術提供的道路靜態真值的生成方法存在效率較低的問題。
3、針對上述的問題,目前尚未提出有效的解決方案。
技術實現思路
1、本技術實施例提供了一種道路靜態真值的生成方法和裝置、存儲介質及電子設備,以至少解決相關技術提供的道路靜態真值的生成方法存在效率較低的技術問題。
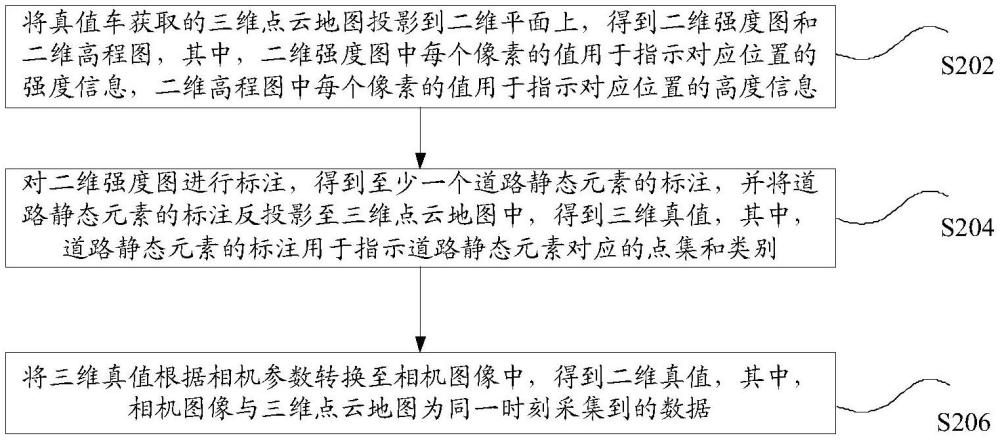
2、根據本技術實施例的一個方面,提供了一種道路靜態真值的生成方法,包括:將真值車獲取的三維點云地圖投影到二維平面上,得到二維強度圖和二維高程圖,其中,二維強度圖中每個像素的值用于指示對應位置的強度信息,二維高程圖中每個像素的值用于指示對應位置的高度信息;對二維強度圖進行標注,得到至少一個道路靜態元素的標注,并將道路靜態元素的標注反投影至三維點云地圖中,得到三維真值,其中,道路靜態元素的標注用于指示道路靜態元素對應的點集和類別;將三維真值根據相機參數轉換至相機圖像中,得到二維真值,其中,相機圖像與三維點云地圖為同一時刻采集到的數據。
3、根據本技術實施例的另一方面,還提供了一種道路靜態真值的生成裝置,包括:二維平面生成單元,用于將真值車獲取的三維點云地圖投影到二維平面上,得到二維強度圖和二維高程圖,其中,二維強度圖中每個像素的值用于指示對應位置的強度信息,二維高程圖中每個像素的值用于指示對應位置的高度信息;三維真值生成單元,用于對二維強度圖進行標注,得到至少一個道路靜態元素的標注,并將道路靜態元素的標注反投影至三維點云地圖中,得到三維真值,其中,道路靜態元素的標注用于指示道路靜態元素對應的點集和類別;二維真值生成單元,用于將三維真值根據相機參數轉換至相機圖像中,得到二維真值,其中,相機圖像與三維點云地圖為同一時刻采集到的數據。
4、可選地,上述二維平面生成單元,包括:將三維點云地圖上的任意點云執行以下操作:二維橫坐標確定模塊,用于確定點云的橫坐標和最小坐標點云的橫坐標的差,將橫坐標之間的差與縮放倍率之間的比值確定為對應的二維像素點的橫坐標;二維縱坐標確定模塊,用于確定點云的縱坐標和最小坐標點云的縱坐標的差,將縱坐標之間的差與縮放倍率之間的比值確定為對應的二維像素點的縱坐標;信息確定模塊,用于確定二維像素點對應的強度信息和高度信息;二維平面生成模塊,用于根據所有的二維像素點的橫坐標、縱坐標和強度信息生成二維強度圖,并根據所有的二維像素點的橫坐標、縱坐標和高度信息生成二維高程圖。
5、可選地,上述信息確定模塊,還用于:根據縮放倍率確定二維像素點對應的三維點云集合,并確定三維點云集合對應的參考強度信息集合和參考高度信息集合;計算參考強度信息集合對應的強度標準差和強度均值,和參考高度信息集合對應的高度標準差和高度均值;根據強度標準差和強度均值對參考強度信息集合進行篩選得到目標強度信息集合,根據高度標準差和高度均值對參考高度信息集合進行篩選得到目標高度信息集合;將目標強度信息集合的平均值確定為二維像素點對應的強度信息,將目標高度信息集合的平均值確定為二維像素點對應的高度信息。
6、可選地,上述三維真值生成單元,包括:拆分模塊,用于對二維強度圖進行拆分得到多個二維強度子圖;標注模塊,用于利用標注模型對二維強度子圖進行標注,得到至少一個道路靜態元素的標注;合并模塊,用于將所有二維強度子圖對應的道路靜態元素的標注進行合并,得到所有道路靜態元素的標注;三維真值生成模塊,用于將所有道路靜態元素的標注反投影至三維點云地圖中,得到三維真值。
7、可選地,上述標注模塊,還用于:對二維強度子圖進行特征提取得到特征圖;將特征圖輸入線型元素標注模型中,得到至少一個第一道路靜態元素的標注,其中,第一道路靜態元素用于指示道路的線型靜態元素;將特征圖輸入圖標元素標注模型中,得到至少一個第二道路靜態元素的標注,其中,第二道路靜態元素用于指示道路的圖標靜態元素;將第一道路靜態元素的標注和第二道路靜態元素的標注合并,得到二維強度子圖對應的標注結果。
8、可選地,上述三維真值生成模塊,還用于:對道路靜態元素對應的點集中像素點執行以下操作:將像素點對應的橫坐標與縮放倍率的乘積與最小坐標點云的橫坐標的和確定為對應的三維點云的橫坐標;將像素點對應的縱坐標與縮放倍率的乘積與最小坐標點云的縱坐標的和確定為對應的三維點云的縱坐標;根據二維高程圖,確定像素點對應的高度信息,并將高度信息確定為對應的三維點云的z軸坐標;根據像素點對應的道路靜態元素的標注確定對應的三維點云的標注。
9、可選地,上述道路靜態真值的生成裝置,還包括:點云地圖生成單元,用于將真值車獲取的點云數據進行特征提取,去除動態障礙物對應的點云數據;對真值車進行預積分處理和前向優化,得到真值車的位姿變化;基于真值車的位姿變化和點云數據生成三維點云地圖。
10、可選地,上述道路靜態真值的生成裝置,還包括:二維評測單元,用于獲取二維預測值,并根據二維預測值和二維真值分別繪制二維預測車道線和二維真實車道線;計算每對二維預測車道線和二維真實車道線間的交并比,將小于二維交并比閾值的交并比對應的二維預測車道線和二維真實車道線去除;將剩余的二維預測車道線和二維真實車道線重新進行匹配,得到新的匹配關系;根據二維預測車道線和二維真實車道線之間新的匹配關系得到預測模型的二維評價結果。
11、可選地,上述道路靜態真值的生成裝置,還包括:三維評測單元,用于獲取三維預測值,并根據三維預測值和三維真值按照預設分段距離進行線性采樣,得到點云對;計算點云對之間的三維預測值和三維真值間的距離,將大于距離閾值的距離對應的三維預測值和三維真值去除;將剩余的三維預測值和三維真值重新進行匹配,得到新的匹配關系;根據三維預測值和三維真值之間新的匹配關系得到預測模型的三維評價結果。
12、根據本技術實施例的又一方面,還提供了一種計算機可讀的存儲介質,該計算機可讀的存儲介質中存儲有計算機程序,其中,該計算機程序被設置為運行時執行上述道路靜態真值的生成方法。
13、根據本技術實施例的又一個方面,提供一種計算機程序產品,該計算機程序產品包括計算機程序/指令,該計算機指令存儲在計算機可讀存儲介質中。計算機設備的處理器從計算機可讀存儲介質讀取該計算機程序/指令,處理器執行該計算機程序/指令,使得該計算機設備執行如以上道路靜態真值的生成方法。
14、根據本技術實施例的又一方面,還提供了一種電子設備,包括存儲器和處理器,上述存儲器中存儲有計算機程序,上述處理器被設置為通過上述計算機程序執行上述的道路靜態真值的生成方法。
15、在本技術實施例中,將真值車獲取的三維點云地圖投影到二維平面上,得到二維強度圖和二維高程圖,其中,二維強度圖中每個像素的值用于指示對應位置的強度信息,二維高程圖中每個像素的值用于指示對應位置的高度信息;對二維強度圖進行標注,得到至少一個道路靜態元素的標注,并將道路靜態元素的標注反投影至三維點云地圖中,得到三維真值,其中,道路靜態元素的標注用于指示道路靜態元素對應的點集和類別;將三維真值根據相機參數轉換至相機圖像中,得到二維真值,其中,相機圖像與三維點云地圖為同一時刻采集到的數據。可以將三維點云地圖投影至二維平面得到二維強度圖和二維高度圖,并在二維強度圖上進行標注,降低了標注的難度,可以自動高效的實現靜態元素識別,且通過將三維真值通過坐標系變換的方式可以自然得到二維真值,簡單高效,提高了靜態真值數據的標注效率。通過上述方法解決了相關技術提供的道路靜態真值的生成方法存在效率較低的技術問題。
- 還沒有人留言評論。精彩留言會獲得點贊!