基于車前預瞄的路面三維信息獲取方法及車身自調整系統
本發明屬于流量計量,具體涉及一種基于車前預瞄的路面三維信息獲取方法及車身自調整系統。
背景技術:
1、在重載運輸過程中,當車輛在復雜路面行駛時,尤其是在有減速帶或凹坑的路面,由于路面的凹凸不平,會引起懸掛裝置的上下振動,導致車身產生不同幅度的振動,這種振動不僅會使駕駛員感到不適,同時將使車輛上所運輸的貨物與車身產生碰撞,同時,當車輛振動頻率較大或振動幅度較高時,對車輛的壽命會有極大影響。
2、目前,懸掛裝置獲取路面信息的方法主要分為間接識別和直接識別兩種。間接識別通過對車輛動力學參數進行建模,利用車輛響應與路面激勵之間的關系來推算路面激勵,如被動懸掛與半主動懸掛,這種方法無需額外傳感器,但尺寸依賴懸掛模型的精確性,需要建立準確的動力學方程。同時,它僅能識別當前輪胎接觸區域的路面狀況,無法使控制器實時調整懸掛執行機構以適應路面狀態,導致其存在信號滯后的問題,該類問題在平整路面時控制效果較好,但若路面上存在凹坑、減速帶這類突變激勵時,由于信號滯后,控制效果較差。直接識別則借助激光雷達、視覺傳感器等車載傳感器直接感知路面狀態,能夠提前獲取車輛前方的路面信息。其中,激光雷達通過掃描生成目標的三維模型,但在獲取路面顏色和紋理信息方面能力較弱,在復雜環境的路面識別中,其準確性難以保證。
3、因此,需要一種可以提前獲取路面信息且對路面紋理具有較高識別能力的路面三維信息提取技術,以此實現懸掛裝置的主動控制,從而降低車身振動幅度與頻率。
技術實現思路
1、本發明的目的是克服現有技術中存在的無法及時根據路面三維信息調整車身尺寸,導致車身因路面不平導致貨物與車身碰撞致使貨物產生損害、控制效果差、準確性難以保證的缺陷,提供一種的基于車前預瞄的路面三維信息獲取方法及車身自調整系統。
2、本發明解決其技術問題所采用的技術方案是:
3、作為第一個方面,一種基于車前預瞄的路面三維信息獲取方法,包括以下內容:
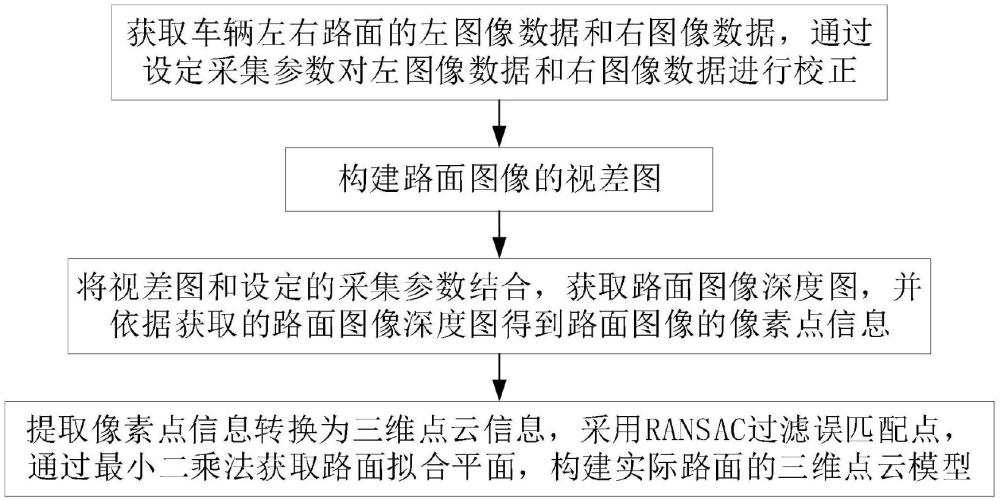
4、獲取車輛左右路面的左圖像數據和右圖像數據,通過設定采集參數對左圖像數據和右圖像數據進行校正;
5、構建路面圖像的視差圖,即將校正后的左圖像數據和右圖像數據作為輸入,利用改進的立體匹配網絡生成視差圖;
6、將視差圖和設定的采集參數結合,獲取路面圖像深度圖,并依據獲取的路面圖像深度圖得到路面圖像的像素點信息;
7、提取像素點信息轉換為三維點云信息,采用ransac過濾誤匹配點,通過最小二乘法獲取路面擬合平面,構建實際路面的三維點云模型。
8、具體地,使用時,根據構建的路面三維點云模型,獲取路面坡度信息,結合路面坡度信息和車輛車況數據獲得懸掛裝置對應的位移輸出量;
9、所述車輛車況數據包括:車輛速度數據、車輛重量數據、對應的懸掛裝置尺寸信息。
10、具體地,所述通過ransac過濾誤匹配點包括以下內容:
11、將基于改進的立體匹配網絡獲取的視差圖轉換為深度圖,并提取深度圖中的像素點信息;
12、隨機選取三個像素點判斷其是否在同一條直線上,若在則重新選取,若不在,則計算三點所在平面的平面方程;
13、計算不同像素點到擬合平面的距離,設定距離閾值,將超過閾值的像素點過濾去除,得到過濾處理后的三維點云數據。
14、具體地,將通過ransac過濾后的三維點云數據,結合采集坐標系,構建基于實際坐標系的三維點云數據;
15、采用最小二乘法,構建三維點云數據集n;
16、根據擬合平面公式,構建路面擬合平面方程。
17、具體地,所述改進的立體匹配網絡采用在立體匹配網絡中結合深度感知層次模塊,通過將校正后的左、右圖像數據導入改進的立體匹配網絡生成視差圖,將生成的視差圖與基于激光雷達獲取的真實視差標簽對比,對網絡進行訓練,訓練完成即為立體匹配網絡。
18、具體地,所述改進的立體匹配網絡生成視差圖包括以下內容:
19、將改進的立體匹配網絡保留其分組相關性的成本量的構造方法,將左特征和右特征沿著信道維度劃分為多個組;
20、計算每個組之間的相關性映射,獲得多個匹配的成本提議;
21、將匹配的成本提議打包成成本卷;
22、深度感知層次模塊采用三個級聯mbconv塊處理左圖像數據的早期特征圖,產生具有編碼相對深度和層次信息的特征圖fd;
23、利用深度感知模塊生成的特征fd調節成本卷的通道權重,增強紋理層次和深度相關區域的匹配準確性;即使用sigmoid函數導出全分辨率的深度圖計算其深度感知通道注意力權重ac,利用深度感知通道注意力權重ac對成本卷的各通道進行調整;
24、將深度感知通道注意力權重ac與從特征圖fd獲得的4d差異體積進行過濾;獲取高精度視差圖。
25、具體地,所述深度感知信道注意權重ac的計算公式如下:
26、
27、式中,fd為層次信息的特征圖。
28、作為第二個方面,采用上述所述的一種基于車前預瞄的路面三維信息獲取方法的車身自調整系統,包括:
29、雙目視覺模塊,安裝在車輛懸掛裝置上,用于實時獲取車輛左右路面的左圖像數據和右圖像數據;
30、雙目校正單元,用于對雙目視覺模塊采集的原始圖像進行校正;
31、雙目匹配單元,基于深度感知層次模塊改進的立體匹配網絡,通過匹配經過校正的左右圖像,獲取高精度的路面視差圖;
32、深度信息單元,通過雙目立體匹配算法獲取視差圖通過相機內參,獲取路面深度圖,并通過深度圖,提取圖像的像素點信息;
33、三維點云單元,通過深度圖提取的像素點信息,將其轉換為三維點云數據;
34、智能控制模塊,獲取三維點云數據計算路面坡度信息,結合車輛車況數據計算懸掛裝置對應的位移輸出量,控制調整車身位移。
35、具體地,所述智能控制模塊包括:
36、車速檢測單元,用于實時檢測車輛的當前速度;
37、重量檢測單元,用于實時檢測車輛的當前質量;
38、三維分析單元,獲取所述三維點云單元中的三維點云數據、所述車速檢測單元中的當前車速、所述重量檢測單元中的當前質量結合懸掛裝置尺寸,獲得懸掛裝置對應的車輪未來將經過路面區域的路面不平度以及通過路面擬合平面獲取路面的坡度數據。
39、具體的,所述智能控制模塊還包括數據分析單元和控制分析單元;
40、所述數據分析單元獲取所述三維點云單元中的三維點云數據、當前車速、車輛重量以及三維分析單元獲得的路面不平度和坡度數據,進行分析處理,計算執行機構所需伸縮量;
41、所述控制分析單元獲取所述數據分析單元計算出的伸縮量,對執行機構輸送控制命令,控制執行機構動作,調整車身位移。
42、本發明的一種基于車前預瞄的路面三維信息獲取方法及車身自調整系統的有益效果是:
43、本發明通過改進的立體匹配網絡對獲取的車輛左、右兩側的左圖像數據和右圖像數據進行處理,生成對應路面的視差圖,并通過提取深度圖中的像素點信息,將其轉換為三維點云信息,先采用ransac過濾誤匹配點,再通過最小二乘法獲取路面擬合平面,構建實際路面的三維點云模型,通過獲取三維點云模型中車輪行駛路線中的路面不平度結合車輛車況數據,能夠提前獲取懸掛裝置的位移輸出量,解決現有技術中獲取三維信息滯后,從而使得懸掛裝置無法精準調整車身的問題。
44、本發明采用雙目視覺模塊進行非接觸式信息獲取,可以提前獲取未來路面信息,不依賴單一的傳感器;通過改進的立體匹配網絡(即gwcnet網絡)處理雙目相機拍攝的左右圖像,生成對應路面的視差圖,并依據相機內參生成深度圖;通過提取深度圖中的像素點信息,將其轉換為三維點云信息,先采用ransac過濾誤匹配點,再通過最小二乘法獲取路面擬合平面,構建實際路面的三維點云模型;通過獲取三維點云模型中車輪行駛路線中的路面不平度結合車輛自身數據,獲取未來懸掛裝置的輸出位移。本發明以雙目視覺模塊、雙目校正單元、雙目匹配單元、三維點云單元以及智能控制模塊獲取懸掛裝置未來需要輸出的位移,可有效地實現懸掛裝置的主動控制,進而減少車身振動,不僅提高了駕駛員的舒適性,還可以減少貨物與車身的碰撞,保障貨物的完整,一定程度上提高車輛壽命。
- 還沒有人留言評論。精彩留言會獲得點贊!