一種芯棒穿芯檢測(cè)方法、系統(tǒng)及介質(zhì)與流程
本發(fā)明涉及芯棒和毛管穿芯檢測(cè),特別涉及一種芯棒穿芯檢測(cè)方法、系統(tǒng)及介質(zhì)。
背景技術(shù):
1、連軋無縫鋼管的生產(chǎn)工藝過程涉及多個(gè)復(fù)雜工序,在軋制過程中,圓鑄坯料需先經(jīng)過穿孔形成毛管,隨后將芯棒插入毛管,再通過連軋管機(jī)進(jìn)行軋制最終形成鋼管,然而,在實(shí)際生產(chǎn)中,芯棒無法正常穿入毛管的現(xiàn)象時(shí)有發(fā)生,如果不能及時(shí)停止穿棒過程就會(huì)對(duì)周邊構(gòu)筑物、設(shè)備及人員產(chǎn)生巨大的安全隱患,同時(shí)造成長(zhǎng)時(shí)間停機(jī),給生產(chǎn)造成巨大的損失,這一問題嚴(yán)重影響了生產(chǎn)的連續(xù)性和穩(wěn)定性,給企業(yè)帶來了諸多不利影響,因此需要在芯棒插入毛管的工序中對(duì)芯棒進(jìn)行檢測(cè),以避免發(fā)生芯棒穿偏的現(xiàn)象。部分企業(yè)通過人工檢測(cè)來判斷芯棒穿偏情況,由于生產(chǎn)環(huán)境的高溫、高亮且較大震動(dòng)等因素會(huì)導(dǎo)致人工檢測(cè)的難度增加,檢測(cè)人員難以長(zhǎng)時(shí)間保持高度集中的注意力,從而增加了誤判的風(fēng)險(xiǎn)。
2、有鑒于此,提出本發(fā)明。
技術(shù)實(shí)現(xiàn)思路
1、為了解決現(xiàn)有人工檢測(cè)芯棒穿偏的難度大、準(zhǔn)確率低的問題,本發(fā)明提供一種芯棒穿芯檢測(cè)方法、系統(tǒng)及介質(zhì)。
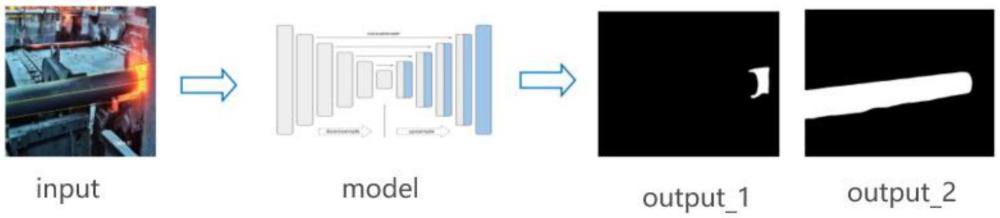
2、本發(fā)明為解決上述技術(shù)問題,提供一種芯棒穿芯檢測(cè)方法,所述檢測(cè)方法包括以下步驟:實(shí)時(shí)采集穿芯作業(yè)的圖像并抽取每幀圖像中的圖像數(shù)據(jù);對(duì)圖像數(shù)據(jù)進(jìn)行去均值歸一化處理;基于卷積神經(jīng)網(wǎng)絡(luò)建立分割模型,并將處理后的圖像數(shù)據(jù)輸入至分割模型內(nèi),以獲得檢測(cè)目標(biāo)mask圖,其中所述目標(biāo)mask圖包括芯棒掩碼圖以及毛管掩碼圖;對(duì)檢測(cè)目標(biāo)mask圖擬合最小外接矩形并獲得檢測(cè)目標(biāo)的中心線;計(jì)算檢測(cè)目標(biāo)的中心線與軌道之間的距離值,并將距離值與預(yù)設(shè)值進(jìn)行比較,獲得穿芯檢測(cè)結(jié)果;其中,檢測(cè)目標(biāo)包括芯棒和毛管。
3、在本發(fā)明的實(shí)施例中,在分別對(duì)檢測(cè)目標(biāo)mask圖擬合最小外接矩形并獲得檢測(cè)目標(biāo)的中心線的步驟中,進(jìn)一步包括步驟:通過旋轉(zhuǎn)卡殼算法不斷旋轉(zhuǎn)一條包圍檢測(cè)目標(biāo)的直線,同時(shí)計(jì)算直線與檢測(cè)目標(biāo)的交點(diǎn);在檢測(cè)目標(biāo)mask圖上遍歷所有外接矩形并計(jì)算出面積最小的外接矩形,以獲得檢測(cè)目標(biāo)mask圖的最小外接矩形;根據(jù)最小外接矩形中的角點(diǎn)坐標(biāo)計(jì)算最小外接矩形中的兩條短邊的中點(diǎn);結(jié)合兩條短邊的中點(diǎn)并利用兩點(diǎn)式直線方程計(jì)算檢測(cè)目標(biāo)的中心線;其中根據(jù)芯棒擬合最小外接矩形后獲得芯棒中心線,根據(jù)毛管擬合最小外接矩形后獲得毛管中心線。
4、在本發(fā)明的實(shí)施例中,在計(jì)算檢測(cè)目標(biāo)的中心線與軌道之間的距離值,并將距離值與預(yù)設(shè)值進(jìn)行比較,獲得穿芯檢測(cè)結(jié)果的步驟中,進(jìn)一步包括步驟:基于芯棒中心線計(jì)算與軌道之間的第一距離值;基于毛管中心線計(jì)算與軌道之間的第二距離值;計(jì)算第一距離值和第二距離值之間差值的絕對(duì)值;將差值與預(yù)設(shè)值進(jìn)行比較,獲得穿芯檢測(cè)結(jié)果。
5、在本發(fā)明的實(shí)施例中,獲得的穿芯檢測(cè)結(jié)果包括:當(dāng)絕對(duì)值大于預(yù)設(shè)值時(shí),確定芯棒和毛管會(huì)發(fā)生穿偏,同時(shí)發(fā)出穿偏預(yù)警;當(dāng)絕對(duì)值小于等于預(yù)設(shè)值時(shí),確定芯棒和毛管不會(huì)發(fā)生穿偏。
6、在本發(fā)明的實(shí)施例中,在去均值歸一化處理的步驟中進(jìn)一步包括步驟:通過均值計(jì)算公式計(jì)算圖像數(shù)據(jù)中所有圖像在每個(gè)通道上的均值;通過標(biāo)準(zhǔn)差計(jì)算公式計(jì)算圖像數(shù)據(jù)中所有圖像在每個(gè)通道上的標(biāo)準(zhǔn)差;通過去均值歸一化計(jì)算公式對(duì)在每個(gè)通道上對(duì)每幀圖像的每個(gè)像素進(jìn)行歸一化操作;其中,均值的計(jì)算公式為標(biāo)準(zhǔn)差計(jì)算公式為去均值歸一化處理的公式為:
7、在本發(fā)明的實(shí)施例中,在實(shí)時(shí)采集穿芯作業(yè)的圖像之前,進(jìn)一步包括步驟:基于目標(biāo)檢測(cè)算法從圖像數(shù)據(jù)中檢測(cè)位于軌道兩側(cè)的芯棒特征和毛管特征;當(dāng)檢測(cè)到芯棒特征在軌道上朝向毛管特征移動(dòng)時(shí)觸發(fā)穿芯檢測(cè)動(dòng)作。
8、在本發(fā)明的實(shí)施例中,在判斷芯棒和毛管發(fā)生穿偏之后還包括步驟:將穿芯檢測(cè)結(jié)果傳輸至plc控制器并利用plc控制器控制穿芯設(shè)備暫停穿芯作業(yè)。
9、本發(fā)明為解決現(xiàn)有技術(shù)中的問題,還提供一種芯棒穿芯檢測(cè)系統(tǒng),應(yīng)用于上述的穿芯檢測(cè)方法,包括:所述穿芯檢測(cè)系統(tǒng)包括穿芯設(shè)備、plc控制器、圖像采集模塊、圖像處理模塊、目標(biāo)檢測(cè)模塊以及結(jié)果預(yù)測(cè)模塊;所述穿芯設(shè)備上設(shè)置有用于傳送芯棒的軌道,所述軌道的一端設(shè)置有毛管;所述plc控制器通過目標(biāo)檢測(cè)模塊與所述穿芯設(shè)備電連接,以根據(jù)所述目標(biāo)檢測(cè)模塊的檢測(cè)結(jié)果控制所述穿芯設(shè)備的運(yùn)行;所述圖像采集模塊被配置為實(shí)時(shí)采集穿芯作業(yè)的圖像并通過對(duì)圖像進(jìn)行解碼抽取每幀的圖像數(shù)據(jù);所述圖像處理模塊被配置為對(duì)圖像數(shù)據(jù)進(jìn)行去均值歸一化處理;所述目標(biāo)檢測(cè)模塊被配置為從處理后的圖像數(shù)據(jù)中獲得檢測(cè)目標(biāo);所述結(jié)果預(yù)測(cè)模塊通過計(jì)算檢測(cè)目標(biāo)的中心線與軌道之間的距離值,并將距離值與預(yù)設(shè)值進(jìn)行比較,獲得穿芯檢測(cè)結(jié)果;其中,檢測(cè)目標(biāo)包括芯棒和毛管。
10、在本發(fā)明的實(shí)施例中,所述圖像采集模塊上設(shè)置有紅外濾波片,所述圖像采集模塊透過所述紅外濾波片實(shí)時(shí)采集穿芯作業(yè)的圖像。
11、本發(fā)明為解決現(xiàn)有技術(shù)中的問題,還提供一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),其特征在于,所述計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)存儲(chǔ)有一個(gè)或者多個(gè)程序,一個(gè)或多個(gè)所述程序可被一個(gè)或者多個(gè)處理器執(zhí)行,以實(shí)現(xiàn)上述的穿芯檢測(cè)方法。
12、相比現(xiàn)有技術(shù),本發(fā)明的有益效果在于:
13、本發(fā)明實(shí)施例所提供離線標(biāo)定裝置以及方法,包括至少以下技術(shù)效果:
14、通過實(shí)時(shí)采集穿芯設(shè)備的圖像數(shù)據(jù),并通過對(duì)圖像數(shù)據(jù)進(jìn)行去均值歸一化處理,以提高圖像數(shù)據(jù)的穩(wěn)定性和可比性,提高后續(xù)進(jìn)行穿偏檢測(cè)的檢測(cè)精度,在處理后的圖像數(shù)據(jù)中,通過先識(shí)別出檢測(cè)目標(biāo)mask圖,然后從檢測(cè)目標(biāo)mask圖中識(shí)別出檢測(cè)目標(biāo)的中心線,并通過計(jì)算檢測(cè)目標(biāo)的中心線與軌道之間的距離值,最后將預(yù)設(shè)值與距離值進(jìn)行比較以得出芯棒的穿芯檢測(cè)結(jié)果,整個(gè)檢測(cè)過程無需人工參與,減少了人工檢測(cè)的主觀性和誤差,提高了檢測(cè)的一致性和可靠性,可實(shí)現(xiàn)對(duì)芯棒的自動(dòng)化穿芯檢測(cè),降低檢測(cè)難度,提高檢測(cè)準(zhǔn)確率,能夠適應(yīng)大規(guī)模、連續(xù)化的生產(chǎn)需求生產(chǎn)自動(dòng)化水平。
15、本發(fā)明實(shí)施例的其他特征和優(yōu)點(diǎn)將在隨后的具體實(shí)施實(shí)施例部分予以說明。
技術(shù)特征:
1.一種芯棒穿芯檢測(cè)方法,其特征在于,所述檢測(cè)方法包括以下步驟:
2.根據(jù)權(quán)利要求1所述的芯棒穿芯檢測(cè)方法,其特征在于,在分別對(duì)檢測(cè)目標(biāo)mask圖擬合最小外接矩形并獲得檢測(cè)目標(biāo)的中心線的步驟中,進(jìn)一步包括步驟:
3.根據(jù)權(quán)利要求2所述的芯棒穿芯檢測(cè)方法,其特征在于,在計(jì)算檢測(cè)目標(biāo)的中心線與軌道之間的距離值,并將距離值與預(yù)設(shè)值進(jìn)行比較,獲得穿芯檢測(cè)結(jié)果的步驟中,進(jìn)一步包括步驟:
4.根據(jù)權(quán)利要求3所述的芯棒穿芯檢測(cè)方法,其特征在于,獲得的穿芯檢測(cè)結(jié)果包括:
5.根據(jù)權(quán)利要求1所述的芯棒穿芯檢測(cè)方法,其特征在于,在去均值歸一化處理的步驟中進(jìn)一步包括步驟:
6.根據(jù)權(quán)利要求1所述的芯棒穿芯檢測(cè)方法,其特征在于,在實(shí)時(shí)采集穿芯作業(yè)的圖像之前,進(jìn)一步包括步驟:
7.根據(jù)權(quán)利要求1所述的芯棒穿芯檢測(cè)方法,其特征在于,在判斷芯棒和毛管發(fā)生穿偏之后還包括步驟:
8.一種芯棒穿芯檢測(cè)系統(tǒng),應(yīng)用于如權(quán)利要求1-7任一項(xiàng)所述的穿芯檢測(cè)方法,其特征在于,包括:所述穿芯檢測(cè)系統(tǒng)包括穿芯設(shè)備、plc控制器、圖像采集模塊、圖像處理模塊、目標(biāo)檢測(cè)模塊以及結(jié)果預(yù)測(cè)模塊;
9.根據(jù)權(quán)利要求1所述的芯棒穿芯檢測(cè)系統(tǒng),其特征在于,所述圖像采集模塊上設(shè)置有紅外濾波片,所述圖像采集模塊透過所述紅外濾波片實(shí)時(shí)采集穿芯作業(yè)的圖像。
10.一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),其特征在于,所述計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)存儲(chǔ)有一個(gè)或者多個(gè)程序,一個(gè)或多個(gè)所述程序可被一個(gè)或者多個(gè)處理器執(zhí)行,以實(shí)現(xiàn)如權(quán)利要求1-7任一項(xiàng)所述的穿芯檢測(cè)方法。
技術(shù)總結(jié)
一種芯棒穿芯檢測(cè)方法、系統(tǒng)及介質(zhì),所述檢測(cè)方法包括以下步驟:實(shí)時(shí)采集穿芯作業(yè)的圖像并抽取每幀圖像中的圖像數(shù)據(jù);對(duì)圖像數(shù)據(jù)進(jìn)行去均值歸一化處理;基于卷積神經(jīng)網(wǎng)絡(luò)建立分割模型,并將處理后的圖像數(shù)據(jù)輸入至分割模型內(nèi),以獲得檢測(cè)目標(biāo)mask圖,其中目標(biāo)mask圖包括芯棒掩碼圖以及毛管掩碼圖;對(duì)檢測(cè)目標(biāo)mask圖擬合最小外接矩形并獲得檢測(cè)目標(biāo)的中心線;計(jì)算檢測(cè)目標(biāo)的中心線與軌道之間的距離值,并將距離值與預(yù)設(shè)值進(jìn)行比較,獲得穿芯檢測(cè)結(jié)果;其中,檢測(cè)目標(biāo)包括芯棒和毛管,本發(fā)明的技術(shù)方案能夠在芯棒穿芯檢測(cè)作業(yè)中減少人工檢測(cè)的主觀性和誤差,提高檢測(cè)的一致性和可靠性,可實(shí)現(xiàn)對(duì)芯棒的自動(dòng)化穿芯檢測(cè),降低檢測(cè)難度,提高檢測(cè)準(zhǔn)確率。
技術(shù)研發(fā)人員:危清清,賈文浩,侯平銀,孫銀健,譚勝虎
受保護(hù)的技術(shù)使用者:湖南瓦特曼機(jī)器人科技有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!