一種面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法與流程
本申請(qǐng)涉及車(chē)輛裝備保障,特別是涉及一種面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法。
背景技術(shù):
1、隨著信息化的進(jìn)一步發(fā)展,車(chē)輛裝備對(duì)于救援等任務(wù)可以發(fā)揮巨大作用,在車(chē)輛裝備規(guī)模大、任務(wù)時(shí)空范圍廣和信息變化快的任務(wù)中,常常存在裝備生存環(huán)境惡劣和保障需求復(fù)雜的問(wèn)題,目前,車(chē)輛裝備保證模式存在運(yùn)行狀態(tài)不透明、故障溯源不準(zhǔn)確和運(yùn)維保障不及時(shí)的問(wèn)題,亟需提高裝備運(yùn)維保障的智能化水平,提升任務(wù)行動(dòng)的精準(zhǔn)執(zhí)行及保障資源的高效協(xié)同。
技術(shù)實(shí)現(xiàn)思路
1、本申請(qǐng)的目的是提供一種面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法,可提高對(duì)車(chē)輛裝備運(yùn)行狀態(tài)監(jiān)測(cè)的準(zhǔn)確性和及時(shí)性。
2、為實(shí)現(xiàn)上述目的,本申請(qǐng)?zhí)峁┝巳缦路桨福?/p>
3、本申請(qǐng)?zhí)峁┝艘环N面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法,包括:
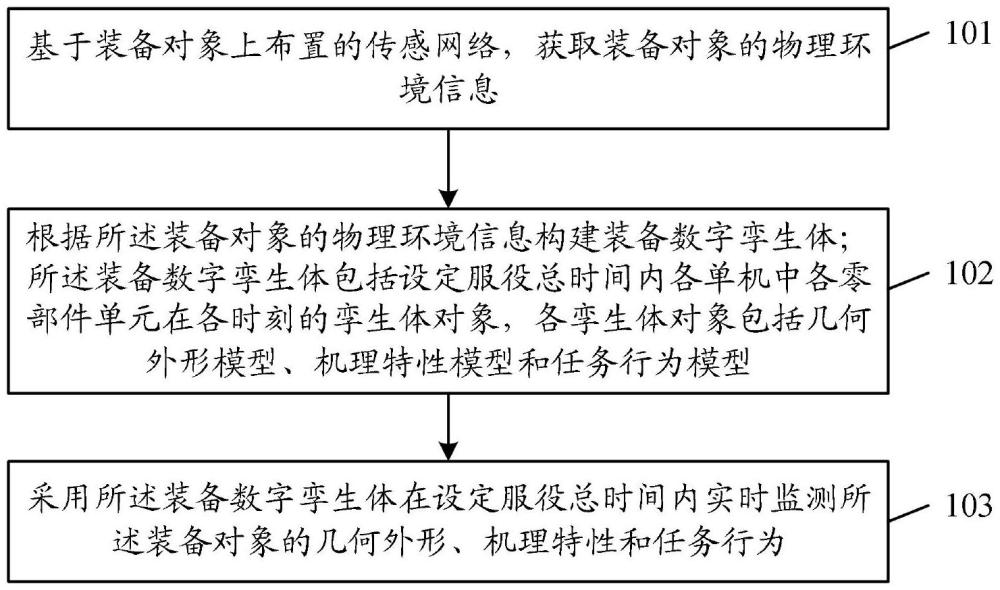
4、基于裝備對(duì)象上布置的傳感網(wǎng)絡(luò),獲取裝備對(duì)象的物理環(huán)境信息;
5、根據(jù)所述裝備對(duì)象的物理環(huán)境信息構(gòu)建裝備數(shù)字孿生體;所述裝備數(shù)字孿生體包括設(shè)定服役總時(shí)間內(nèi)各單機(jī)中各零部件單元在各時(shí)刻的孿生體對(duì)象,各孿生體對(duì)象包括幾何外形模型、機(jī)理特性模型和任務(wù)行為模型;
6、采用所述裝備數(shù)字孿生體在設(shè)定服役總時(shí)間內(nèi)實(shí)時(shí)監(jiān)測(cè)所述裝備對(duì)象的幾何外形、機(jī)理特性和任務(wù)行為。
7、可選地,所述裝備數(shù)字孿生體表示為:
8、
9、其中,dtt表示所述裝備數(shù)字孿生體,t表示所述設(shè)定服役總時(shí)間,j表示所述零部件單元的數(shù)量,i表示所述單機(jī)的數(shù)量,表示第i個(gè)單機(jī)中第j個(gè)零部件單元在t時(shí)刻的孿生體對(duì)象,和分別表示第i個(gè)單機(jī)中第j個(gè)零部件單元在t時(shí)刻的幾何外形模型、機(jī)理特性模型和任務(wù)行為模型。
10、可選地,所述幾何外形模型包括零部件單元的幾何特征、性能特征和運(yùn)動(dòng)副,所述幾何特征包括孔、槽和螺紋,所述性能特征包括材料、公差和倒角,所述運(yùn)動(dòng)副包括轉(zhuǎn)動(dòng)副、螺旋副和移動(dòng)副。
11、可選地,所述裝備數(shù)字孿生體還包括根據(jù)各零部件單元的運(yùn)動(dòng)副構(gòu)建所述裝備數(shù)字孿生體的多體運(yùn)動(dòng)模型。
12、可選地,根據(jù)各零部件單元的運(yùn)動(dòng)副構(gòu)建所述裝備數(shù)字孿生體的多體運(yùn)動(dòng)模型,具體包括:
13、根據(jù)裝備對(duì)象的幾何特征和性能特征,建立各零部件單元之間的裝配關(guān)系以及各零部件單元之間的約束關(guān)系;
14、對(duì)各零部件單元進(jìn)行剛體和柔性體的定義與重構(gòu),并定義重構(gòu)后各零部件單元的物理特性;
15、將所述裝配關(guān)系、所述約束關(guān)系以及重構(gòu)后各零部件單元的物理特性賦予所述裝備對(duì)象的幾何模型,在三維驅(qū)動(dòng)引擎中建立數(shù)字孿生幾何模型;
16、為所述數(shù)字孿生幾何模型添加運(yùn)動(dòng)學(xué)特征或者動(dòng)力學(xué)特征,對(duì)所述裝備對(duì)象的運(yùn)動(dòng)形式進(jìn)行仿真驗(yàn)證,將通過(guò)仿真驗(yàn)證的數(shù)字孿生幾何模型作為所述多體運(yùn)動(dòng)模型。
17、可選地,所述物理特性包括剛度、阻尼和摩擦系數(shù)。
18、可選地,所述裝備對(duì)象的幾何模型為step格式模型。
19、可選地,根據(jù)所述裝備對(duì)象的物理環(huán)境信息構(gòu)建裝備數(shù)字孿生體,具體包括:
20、采用故障模式影響及危害性分析方法確定所述裝備數(shù)字孿生體中各零部件單元的故障模式;
21、根據(jù)各零部件單元的故障模式對(duì)所述裝備對(duì)象的影響,確定所述裝備對(duì)象中各零部件單元產(chǎn)生的故障現(xiàn)象;
22、根據(jù)各零部件單元產(chǎn)生的故障現(xiàn)象確定各零部件單元產(chǎn)生的失效模式以及各失效模式對(duì)應(yīng)的失效機(jī)理;
23、根據(jù)各零部件單元的所述故障模式、所述故障現(xiàn)象和所述失效機(jī)理構(gòu)建各零部件單元的所述機(jī)理特性模型。
24、可選地,所述裝備數(shù)字孿生體還包括各單機(jī)的故障模式與該單機(jī)中各零部件單元的失效機(jī)理之間的關(guān)聯(lián)關(guān)系。
25、可選地,所述任務(wù)行為模型包括任務(wù)行為和執(zhí)行所述任務(wù)行為過(guò)程中的動(dòng)態(tài)狀態(tài)行為,所述任務(wù)行為通過(guò)流程序列表示,所述動(dòng)態(tài)狀態(tài)行為用于基于所述傳感網(wǎng)絡(luò)采集的物理環(huán)境信息實(shí)時(shí)映射所述裝備對(duì)象的行為狀態(tài)。
26、根據(jù)本申請(qǐng)?zhí)峁┑木唧w實(shí)施例,本申請(qǐng)公開(kāi)了以下技術(shù)效果:本申請(qǐng)?zhí)峁┝艘环N面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法,根據(jù)裝備對(duì)象的物理環(huán)境信息構(gòu)建裝備數(shù)字孿生體;裝備數(shù)字孿生體包括設(shè)定服役總時(shí)間內(nèi)各單機(jī)中各零部件單元在各時(shí)刻的孿生體對(duì)象,各孿生體對(duì)象包括幾何外形模型、機(jī)理特性模型和任務(wù)行為模型,通過(guò)裝備數(shù)字孿生體實(shí)時(shí)監(jiān)測(cè)所述裝備對(duì)象的幾何外形、機(jī)理特性和任務(wù)行為,實(shí)現(xiàn)對(duì)于裝備對(duì)象在幾何外形、機(jī)理特性和任務(wù)行為三個(gè)維度的監(jiān)測(cè),提高了裝備狀態(tài)監(jiān)測(cè)的精準(zhǔn)性,通過(guò)裝備數(shù)字孿生體與裝備對(duì)象的同步性,提高了裝備狀態(tài)監(jiān)測(cè)的及時(shí)性。
技術(shù)特征:
1.一種面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法,其特征在于,所述面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法包括:
2.根據(jù)權(quán)利要求1所述的面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法,其特征在于,所述裝備數(shù)字孿生體表示為:
3.根據(jù)權(quán)利要求2所述的面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法,其特征在于,所述幾何外形模型包括零部件單元的幾何特征、性能特征和運(yùn)動(dòng)副,所述幾何特征包括孔、槽和螺紋,所述性能特征包括材料、公差和倒角,所述運(yùn)動(dòng)副包括轉(zhuǎn)動(dòng)副、螺旋副和移動(dòng)副。
4.根據(jù)權(quán)利要求3所述的面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法,其特征在于,所述裝備數(shù)字孿生體還包括根據(jù)各零部件單元的運(yùn)動(dòng)副構(gòu)建所述裝備數(shù)字孿生體的多體運(yùn)動(dòng)模型。
5.根據(jù)權(quán)利要求4所述的面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法,其特征在于,根據(jù)各零部件單元的運(yùn)動(dòng)副構(gòu)建所述裝備數(shù)字孿生體的多體運(yùn)動(dòng)模型,具體包括:
6.根據(jù)權(quán)利要求5所述的面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法,其特征在于,所述物理特性包括剛度、阻尼和摩擦系數(shù)。
7.根據(jù)權(quán)利要求5所述的面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法,其特征在于,所述裝備對(duì)象的幾何模型為step格式模型。
8.根據(jù)權(quán)利要求2所述的面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法,其特征在于,根據(jù)所述裝備對(duì)象的物理環(huán)境信息構(gòu)建裝備數(shù)字孿生體,具體包括:
9.根據(jù)權(quán)利要求8所述的面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法,其特征在于,所述裝備數(shù)字孿生體還包括各單機(jī)的故障模式與該單機(jī)中各零部件單元的失效機(jī)理之間的關(guān)聯(lián)關(guān)系。
10.根據(jù)權(quán)利要求2所述的面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法,其特征在于,所述任務(wù)行為模型包括任務(wù)行為和執(zhí)行所述任務(wù)行為過(guò)程中的動(dòng)態(tài)狀態(tài)行為,所述任務(wù)行為通過(guò)流程序列表示,所述動(dòng)態(tài)狀態(tài)行為用于基于所述傳感網(wǎng)絡(luò)采集的物理環(huán)境信息實(shí)時(shí)映射所述裝備對(duì)象的行為狀態(tài)。
技術(shù)總結(jié)
本申請(qǐng)公開(kāi)了一種面向特種車(chē)輛裝備的數(shù)字孿生模型構(gòu)建方法,涉及車(chē)輛裝備保障技術(shù)領(lǐng)域,該方法包括:基于裝備對(duì)象上布置的傳感網(wǎng)絡(luò),獲取裝備對(duì)象的物理環(huán)境信息;根據(jù)所述裝備對(duì)象的物理環(huán)境信息構(gòu)建裝備數(shù)字孿生體;所述裝備數(shù)字孿生體包括設(shè)定服役總時(shí)間內(nèi)各單機(jī)中各零部件單元在各時(shí)刻的孿生體對(duì)象,各孿生體對(duì)象包括幾何外形模型、機(jī)理特性模型和任務(wù)行為模型;采用所述裝備數(shù)字孿生體在設(shè)定服役總時(shí)間內(nèi)實(shí)時(shí)監(jiān)測(cè)所述裝備對(duì)象的幾何外形、機(jī)理特性和任務(wù)行為。本申請(qǐng)可提高對(duì)車(chē)輛裝備運(yùn)行狀態(tài)監(jiān)測(cè)的準(zhǔn)確性和及時(shí)性。
技術(shù)研發(fā)人員:呂艷梅,張連武,李萬(wàn)領(lǐng),梁偉杰,李博,黃文斌,洪東跑,方偉光,洪佳卉,王堯,崔巍巍,周金磊
受保護(hù)的技術(shù)使用者:中國(guó)人民解放軍32181部隊(duì)
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!