一種豬尾叉骨三維不規(guī)則剔除界面生成方法
本發(fā)明涉及畜類胴體分割領(lǐng)域,具體涉及一種豬尾叉骨三維不規(guī)則剔除界面生成方法。
背景技術(shù):
1、豬肉營養(yǎng)豐富,被廣泛應(yīng)用于各種菜肴和食品加工中,是全球飲食文化不可或缺的一部分。在豬肉生產(chǎn)過程中,精細(xì)化分割是確保肉質(zhì)品質(zhì)和經(jīng)濟(jì)效益的關(guān)鍵步驟。其中,尾叉骨幾何結(jié)構(gòu)復(fù)雜、形狀多變且不規(guī)則,從豬后腿中將其剔除一直是一個(gè)復(fù)雜且具有挑戰(zhàn)性的環(huán)節(jié)。目前,國內(nèi)的尾叉骨剔除依然多依靠人工實(shí)現(xiàn)。人工剔骨過程中,即便擁有一定的分割經(jīng)驗(yàn),但由于骨骼結(jié)構(gòu)的復(fù)雜性與不可見性,在剔骨過程中依然會(huì)出現(xiàn)尾叉骨緊密連接的關(guān)鍵軟組織損傷、刀具滑動(dòng)與卡頓,剔除后尾叉骨的形狀要求難以保持一致等問題,進(jìn)而導(dǎo)致剔除質(zhì)量和效率低下。采用機(jī)械自動(dòng)化方式剔骨,雖然可以減輕工人的勞動(dòng)負(fù)擔(dān)、提升剔骨效率,但由于機(jī)器在執(zhí)行剔骨操作前,豬尾叉骨與周圍組織之間的精確剔除界面難以獲取,導(dǎo)致刀具無法沿著預(yù)定軌跡分割,產(chǎn)生肉品損耗。
2、申請(qǐng)?zhí)枮?02111393371.7的發(fā)明專利,公開了一種畜類胴體剔骨分割裝置和方法。剔骨分割裝置包括:工作臺(tái)、骨骼掃描機(jī)構(gòu)、分割剔骨機(jī)器人、輔助抓取機(jī)器人。剔骨分割方法為:將待分割的畜類胴體固定在工作臺(tái)上;移動(dòng)工作臺(tái)到掃描位置,使用骨骼掃描機(jī)構(gòu)中的x射線獲取骨骼形狀和位置信息;將工作臺(tái)移動(dòng)到切割位置,啟動(dòng)抓取裝置輔助固定骨骼;分割剔骨機(jī)器人根據(jù)掃描的骨骼信息,自動(dòng)調(diào)整切割路徑,完成分割;將分離后的骨骼和肉分別放入料筐。具體地,通過骨骼掃描機(jī)構(gòu)中的x射線掃描設(shè)備捕獲捕捉豬骨的形狀、密度、位置和二維影像數(shù)據(jù),通過算法將其轉(zhuǎn)換為骨骼的三維形狀信息,形成骨骼模型。將當(dāng)前骨骼模型與標(biāo)準(zhǔn)骨骼模型對(duì)比,得到實(shí)際骨骼和標(biāo)準(zhǔn)骨骼的偏差值,使用該偏差值修正分割剔骨機(jī)器人的預(yù)設(shè)剔骨路徑和運(yùn)動(dòng)軌跡。該方法流程簡便、易于控制和實(shí)現(xiàn),并在一定程度上提升了精確性和穩(wěn)定性。但過于依賴標(biāo)準(zhǔn)模型,降低了處理非標(biāo)準(zhǔn)形狀時(shí)的靈活度,在遇到較大偏差或骨骼結(jié)構(gòu)突變情況下,可能會(huì)導(dǎo)致分割路徑偏移,造成肉品損耗,且方法是基于整體模型的偏差計(jì)算,而不是針對(duì)骨骼結(jié)構(gòu)中復(fù)雜局部區(qū)域進(jìn)行精細(xì)的分割路徑調(diào)整和優(yōu)化,這會(huì)影響剔除效果的一致性。
技術(shù)實(shí)現(xiàn)思路
1、針對(duì)現(xiàn)有技術(shù)中的問題,本發(fā)明提供一種豬尾叉骨三維不規(guī)則剔除界面生成方法,目的在于可處理尾叉骨復(fù)雜區(qū)域的形態(tài),獲得精準(zhǔn)的尾叉骨剔除界面。
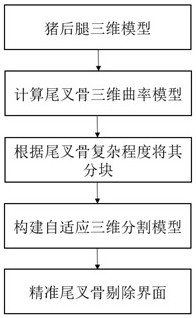
2、一種豬尾叉骨三維不規(guī)則剔除界面生成方法,包括以下步驟:
3、步驟1:獲得尾叉骨的三維曲率模型;
4、步驟2:基于三維曲率模型,按照尾叉骨的形狀的復(fù)雜程度將尾叉骨區(qū)域進(jìn)行分塊處理,獲得復(fù)雜度相似的區(qū)域并記為分塊;
5、步驟3:針對(duì)不同復(fù)雜度相似的區(qū)域,構(gòu)建自適應(yīng)三維分割模型,獲取最優(yōu)的尾叉骨剔除界面。
6、進(jìn)一步為:自適應(yīng)三維分割模型包括第一網(wǎng)絡(luò)單元、第二網(wǎng)絡(luò)單元和整體自適應(yīng)三維分割網(wǎng)絡(luò),第一網(wǎng)絡(luò)單元用于對(duì)尾叉骨區(qū)域每一個(gè)分塊的復(fù)雜度評(píng)分?jǐn)?shù)據(jù)進(jìn)行處理,形成復(fù)雜度評(píng)分處理層,之后引入到第二網(wǎng)絡(luò)單元的關(guān)鍵位置,并根據(jù)復(fù)雜度評(píng)分?jǐn)?shù)據(jù)和輸入特征圖的分布,通過mamba模塊生成動(dòng)態(tài)特征建模路徑;
7、第二網(wǎng)絡(luò)單元用于對(duì)尾叉骨區(qū)域的三維點(diǎn)云數(shù)據(jù)進(jìn)行處理,再逐步提取和恢復(fù)特征,對(duì)尾叉骨區(qū)域進(jìn)行初步的分割;
8、整體自適應(yīng)三維分割網(wǎng)絡(luò)由第一網(wǎng)絡(luò)單元和第二網(wǎng)絡(luò)單元共同組成,第二網(wǎng)絡(luò)單元結(jié)合第一網(wǎng)絡(luò)單元中復(fù)雜評(píng)分處理層和mamba模塊對(duì)尾叉骨區(qū)域的每個(gè)分塊進(jìn)行分割和特征細(xì)化,生成最終精確的尾叉骨剔除界面。
9、進(jìn)一步為:第一網(wǎng)絡(luò)單元由復(fù)雜度評(píng)分處理層和mamba模塊兩部分組成;
10、復(fù)雜度評(píng)分處理層通過全連接層(fc)對(duì)復(fù)雜度評(píng)分?jǐn)?shù)據(jù)進(jìn)行處理,將評(píng)分?jǐn)U展為與第二網(wǎng)絡(luò)單元關(guān)鍵位置特征圖的維度匹配的張量形式;
11、mamba模塊由線性變換(linear)、1d卷積(conv1d)、非線性激活函數(shù)(silu)和選擇性狀態(tài)空間(s6)組成;mamba模塊中,輸入特征圖??首先經(jīng)過兩個(gè)并行的線性變換,生成兩條不同的特征流;其次,第一條特征流經(jīng)過1d卷積操作捕獲局部尾叉骨特征,提取特征的局部特征模式和短期依賴;接著,兩條特征流均通過silu激活函數(shù),silu激活函數(shù)的公式為:
12、
13、其中,是sigmoid函數(shù),增強(qiáng)了對(duì)輸入值的靈敏度;
14、然后,第一條特征流繼續(xù)經(jīng)過選擇性狀態(tài)空間;最后,兩條特征流通過殘差連接相加,得到融合后的特征,融合后的特征再通過線性層生成最終的輸出特征。
15、進(jìn)一步為:mamba模塊通過選擇性狀態(tài)空間動(dòng)態(tài)調(diào)整特定路徑生成的特征圖,即為生成的動(dòng)態(tài)特征建模路徑。
16、進(jìn)一步為:第二網(wǎng)絡(luò)單元為3d?u-net框架組成;
17、3d?u-net框架包括3個(gè)編碼層、1個(gè)瓶頸層和3個(gè)解碼層,每個(gè)編碼層均由兩個(gè)3d卷積層(conv)組成,每個(gè)3d卷積層后接批量歸一化(bn)和relu激活函數(shù)(conv+bn+relu),在每個(gè)編碼層的末尾,采用3d最大池化(max?pool)操作,將特征圖的分辨率減半,編碼層在編碼過程中,第二網(wǎng)絡(luò)單元特征通道數(shù)加倍;
18、瓶頸層包含兩次連續(xù)的3d卷積操作;
19、每個(gè)解碼層包含一次反卷積操作并用于對(duì)特征圖進(jìn)行上采樣,上采樣后形成的特征圖與對(duì)應(yīng)的編碼層特征圖通過跳躍連接進(jìn)行拼接(cat),結(jié)合低級(jí)和高級(jí)特征圖;拼接后的特征圖經(jīng)過兩次3d卷積層、批量歸一化和relu激活函數(shù)操作;在最后一層解碼層加入一次單獨(dú)的3d卷積操作。
20、進(jìn)一步為:第二網(wǎng)絡(luò)單元的關(guān)鍵位置有3個(gè),分別為:第三個(gè)編碼層中max?pool之后的位置、第一個(gè)解碼層中up?conv之后的位置、第三個(gè)解碼層中up?conv之后的位置。
21、進(jìn)一步為:整體自適應(yīng)三維分割網(wǎng)絡(luò)由3個(gè)編碼層、1個(gè)瓶頸層和3個(gè)解碼層組成;
22、整體自適應(yīng)三維分割網(wǎng)絡(luò)的前兩個(gè)編碼層與第二網(wǎng)絡(luò)單元中的前兩個(gè)編碼層相同,整體自適應(yīng)三維分割網(wǎng)絡(luò)的第三個(gè)編碼層包括與第二網(wǎng)絡(luò)單元的第三個(gè)編碼層相同的結(jié)構(gòu),并在與第二網(wǎng)絡(luò)單元的第三個(gè)編碼層相同的結(jié)構(gòu)中max?pool之后的位置,將復(fù)雜度評(píng)分處理層中的評(píng)分,擴(kuò)展為與max?pool操作之后生成的特征圖相同的張量;之后將復(fù)雜度評(píng)分處理層與max?pool操作之后生成的特征圖做廣播操作,廣播操作后生成的特征圖為該第三個(gè)編碼層的深層特征圖,廣播操作使第二網(wǎng)絡(luò)單元中第三個(gè)編碼層中max?pool之后的位置關(guān)鍵位置引入該部分的復(fù)雜度評(píng)分處理層;最后,通過mamba模塊進(jìn)一步對(duì)第三個(gè)編碼層廣播操作后生成的深層特征圖進(jìn)行選擇性建模,通過局部卷積和狀態(tài)空間機(jī)制增強(qiáng)網(wǎng)絡(luò)的特征表達(dá)能力,從而適配不同復(fù)雜度區(qū)域的特征需求,形成整體自適應(yīng)三維分割網(wǎng)絡(luò)的第三個(gè)編碼層;
23、自適應(yīng)三維分割網(wǎng)絡(luò)的瓶頸層用于連接編碼層與解碼層,并與第二網(wǎng)絡(luò)單元中的瓶頸層相同;
24、整體自適應(yīng)三維分割網(wǎng)絡(luò)的第一個(gè)解碼層包括與第二網(wǎng)絡(luò)單元的第一個(gè)解碼層相同的結(jié)構(gòu),在與第二網(wǎng)絡(luò)單元的第一個(gè)解碼層相同的結(jié)構(gòu)中反卷積之后的位置,復(fù)雜度評(píng)分處理層中評(píng)分將擴(kuò)展為與反卷積)操作之后生成的特征圖相同的張量;之后將復(fù)雜度評(píng)分處理層與反卷積操作之后生成的特征圖做廣播操作,廣播操作后生成的特征圖為自適應(yīng)三維分割網(wǎng)絡(luò)第一個(gè)解碼層的深層特征圖,廣播操作使第二網(wǎng)絡(luò)單元中第一個(gè)解碼層中反卷積之后引入該部分的復(fù)雜度評(píng)分處理層;接著,通過mamba模塊進(jìn)一步對(duì)第一個(gè)解碼層廣播操作后生成的深層特征圖進(jìn)行選擇性建模,通過局部卷積和狀態(tài)空間機(jī)制增強(qiáng)網(wǎng)絡(luò)的特征表達(dá)能力,從而適配不同復(fù)雜度區(qū)域的特征需求;最后,經(jīng)過兩次3d卷積層、批量歸一化和relu激活函數(shù)操作(conv+bn+relu?2)之后,形成自適應(yīng)三維分割網(wǎng)絡(luò)的第一個(gè)解碼層;
25、自適應(yīng)三維分割網(wǎng)絡(luò)的第二個(gè)解碼層與第二網(wǎng)絡(luò)單元中的第二個(gè)解碼層相同;
26、整體自適應(yīng)三維分割網(wǎng)絡(luò)的第三個(gè)解碼層包括與第二網(wǎng)絡(luò)單元的第三個(gè)解碼層相同的結(jié)構(gòu),在與第二網(wǎng)絡(luò)單元的第一個(gè)解碼層相同的結(jié)構(gòu)中反卷積之后的位置,復(fù)雜度評(píng)分處理層中評(píng)分將擴(kuò)展為與反卷積操作之后生成的特征圖相同的張量;之后將復(fù)雜度評(píng)分處理層與反卷積操作之后生成的特征圖做廣播操作,廣播操作后生成的特征圖為自適應(yīng)三維分割網(wǎng)絡(luò)第一個(gè)解碼層的深層特征圖,廣播操作使第二網(wǎng)絡(luò)單元中第一個(gè)解碼層中反卷積之后引入該部分的復(fù)雜度評(píng)分處理層;接著,mamba模塊進(jìn)一步對(duì)第一個(gè)解碼層廣播操作后生成的深層特征圖進(jìn)行選擇性建模,通過局部卷積和狀態(tài)空間機(jī)制增強(qiáng)網(wǎng)絡(luò)的特征表達(dá)能力,從而適配不同復(fù)雜度區(qū)域的特征需求;最后,經(jīng)過兩次3d卷積層、批量歸一化和relu激活函數(shù)操作(conv+bn+relu?2)之后,形成自適應(yīng)三維分割網(wǎng)絡(luò)的第三個(gè)解碼層;
27、進(jìn)一步為:利用交叉熵?fù)p失函數(shù)、額外的正則化項(xiàng)平衡模型、梯度下降的優(yōu)化算法對(duì)自適應(yīng)三維分割模型進(jìn)行訓(xùn)練。
28、進(jìn)一步為:步驟1包括以下步驟:
29、步驟1.1:根據(jù)豬后腿三維模型的橫斷面的逐個(gè)切片圖像,利用閾值分割技術(shù)獲取豬后腿尾叉骨的初步分割線;
30、步驟1.2:對(duì)初步分割線進(jìn)行曲率分析,量化逐個(gè)切片圖像中骨骼的彎曲程度,獲得每個(gè)切片圖像上初步分割線的曲率值;
31、步驟1.3:利用多方向切片曲率值數(shù)據(jù)映射方法,構(gòu)建為尾叉骨的三維曲率模型。
32、進(jìn)一步為:步驟2.1:分別將各個(gè)方向的逐個(gè)切片圖像中的曲率數(shù)據(jù)映射到三維空間,獲得各個(gè)方向包含曲率信息的三維點(diǎn)云,設(shè)定分塊類別數(shù),將三維點(diǎn)云分為個(gè)分塊;
33、對(duì)于三維點(diǎn)云,每個(gè)點(diǎn)的特征向量由其三維空間位置和曲率值組成,即特征向量為;先對(duì)所有點(diǎn)的曲率值進(jìn)行排序,排序后可直接依據(jù)曲率值的統(tǒng)計(jì)分布來確定閾值;對(duì)曲率值從小到大的排序后,選擇合適的多個(gè)分位數(shù)作為劃分個(gè)復(fù)雜度等級(jí)區(qū)域的閾值,根據(jù)設(shè)定的閾值,將每個(gè)點(diǎn)在尾叉骨三維空間中的位置與其曲率類別進(jìn)行對(duì)應(yīng),形成個(gè)不同復(fù)雜度的點(diǎn)集,組成個(gè)不同的分塊區(qū)域,即分塊;
34、步驟2.2:使用k-means++方法初始聚類中心;
35、從三維點(diǎn)云形成的數(shù)據(jù)集中隨機(jī)選擇一個(gè)數(shù)據(jù)點(diǎn)作為第一個(gè)聚類中心;計(jì)算數(shù)據(jù)集中的每個(gè)數(shù)據(jù)點(diǎn)與聚類中心之間的歐幾里得距離;對(duì)于每個(gè)未被選為聚類中心的數(shù)據(jù)點(diǎn),計(jì)算它與最近聚類中心的距離;根據(jù)這些距離的平方來分配選擇為下一個(gè)聚類中心的概率,距離越大,被選中的概率越高;使用上一步計(jì)算出的概率分布,通過隨機(jī)抽樣的方式來選擇新的聚類中心;重復(fù)上述步驟,直到選擇個(gè)聚類中心,選出的n個(gè)聚類中心即為初始中心點(diǎn);
36、k-means++算法每次選擇新中心時(shí),都是基于當(dāng)前已選擇的中心和所有數(shù)據(jù)點(diǎn)來計(jì)算距離和概率,設(shè)三維曲率模型中數(shù)據(jù)點(diǎn)p坐標(biāo)為,聚類中心c坐標(biāo)為;
37、步驟2.3:對(duì)三維曲率模型進(jìn)行類別分配,獲得初步的分類結(jié)果;
38、將每個(gè)數(shù)據(jù)點(diǎn)分配給最近的初始中心點(diǎn)所在的“簇”中,形成個(gè)類,即將尾叉骨的每個(gè)部分歸類到其復(fù)雜度最相似的組中,進(jìn)行初步歸類;類別分配過程如下:對(duì)于每個(gè)數(shù)據(jù)點(diǎn),計(jì)算其與每個(gè)聚類中心的距離,將分配給離它最近的聚類中心;
39、步驟2.4:更新聚類中心,即,根據(jù)初步的分類結(jié)果,重新計(jì)算每個(gè)簇的中心點(diǎn),即計(jì)算每個(gè)類別中所有點(diǎn)的平均位置,作為新的聚類中心;
40、步驟2.5:迭代優(yōu)化,即,重復(fù)步驟2.3和步驟2.4,當(dāng)聚類中心點(diǎn)的位置趨于穩(wěn)定或達(dá)到預(yù)定的迭代次數(shù)時(shí),得到個(gè)簇的結(jié)果,形成個(gè)由同類曲率類別點(diǎn)組成的子塊,即復(fù)雜度相似的區(qū)域。
41、本發(fā)明的有益效果:采用尾叉骨分塊處理后融合的方式,不僅能夠靈活地應(yīng)對(duì)骨骼的多變形態(tài),實(shí)現(xiàn)個(gè)性化的剔骨效果,還可以確保剔除界面的連續(xù)性和光滑度,便利后續(xù)的自動(dòng)化剔骨操作,減少了肉品損耗。此外,自適應(yīng)三維分割模型根據(jù)不同骨塊的復(fù)雜度進(jìn)行特定處理,既優(yōu)化了分割效率,又提升了分割的準(zhǔn)確性。
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!