自動目標生產(chǎn)發(fā)起方法、裝置、設(shè)備、介質(zhì)和程序產(chǎn)品
本公開涉及衛(wèi)星數(shù)據(jù)處理,具體地涉及一種自動目標生產(chǎn)發(fā)起方法、裝置、設(shè)備、介質(zhì)和程序產(chǎn)品。
背景技術(shù):
1、隨著衛(wèi)星數(shù)據(jù)的廣泛應(yīng)用,產(chǎn)品的時效性越來越引起高度重視,為了快速的得到產(chǎn)品,目前地面處理系統(tǒng)采用流式處理,針對衛(wèi)星下傳的原始數(shù)據(jù)進行實時處理,不積壓。
2、相關(guān)技術(shù)中是基于成像行時來發(fā)起目標產(chǎn)品生產(chǎn),如圖1所示,衛(wèi)星沿著飛行方向成像了10s數(shù)據(jù),當?shù)孛嫦到y(tǒng)接收到5s數(shù)據(jù)的時候平臺就發(fā)起目標產(chǎn)品生產(chǎn)。為了便于管理,用戶會將數(shù)據(jù)進行分景管理,如圖1中的數(shù)據(jù)被分成了3景。當目標拍攝計劃正常時,也就是將目標位于拍攝范圍的中間時,如圖1中的目標b時,基于相關(guān)技術(shù)中的發(fā)起策略用戶可以得到包含目標b的目標產(chǎn)品,如圖1中紅色框的產(chǎn)品范圍;但是由于軌道計算不準確、衛(wèi)星管控計劃下達不準確等原因?qū)е履繕瞬晃挥谂臄z范圍的中間位置,如圖1中目標a和c,這種基于成像行時來發(fā)起目標產(chǎn)品生產(chǎn)的方式容易導致用戶拿不到包含目標a和c的產(chǎn)品。
技術(shù)實現(xiàn)思路
1、鑒于上述問題,本公開提供了自動目標生產(chǎn)發(fā)起方法、裝置、設(shè)備、介質(zhì)和程序產(chǎn)品。
2、根據(jù)本公開的第一個方面,提供了一種自動目標生產(chǎn)發(fā)起方法,包括:
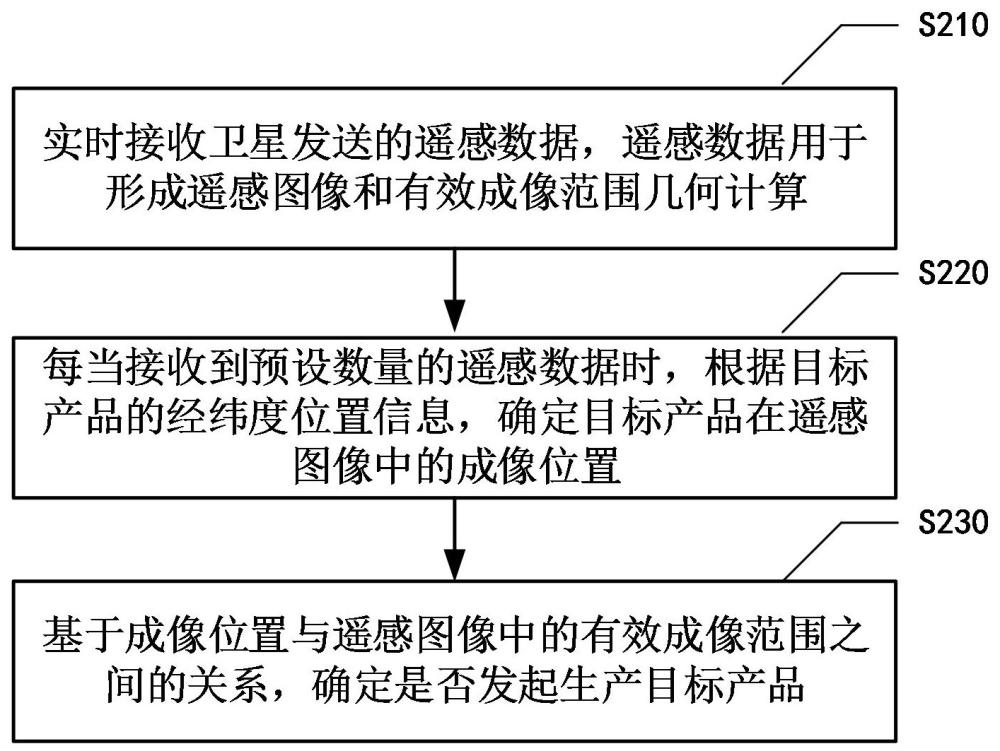
3、實時接收衛(wèi)星發(fā)送的遙感數(shù)據(jù),所述遙感數(shù)據(jù)用于形成遙感圖像和有效成像范圍幾何計算;
4、每當接收到預(yù)設(shè)數(shù)量的遙感數(shù)據(jù)時,根據(jù)目標產(chǎn)品的經(jīng)緯度位置信息,確定所述目標產(chǎn)品在所述遙感圖像中的成像位置;
5、基于所述成像位置與所述遙感圖像中的有效成像范圍之間的關(guān)系,確定是否發(fā)起生產(chǎn)所述目標產(chǎn)品。
6、根據(jù)本公開的實施例,所述根據(jù)目標產(chǎn)品的經(jīng)緯度位置信息,確定所述目標產(chǎn)品在所述遙感圖像中的成像位置包括:
7、利用所述遙感數(shù)據(jù),構(gòu)建嚴密幾何定位模型,所述嚴密幾何定位模型基于所述衛(wèi)星發(fā)送的遙感數(shù)據(jù)中的行時信息和姿軌信息計算而得;
8、將目標產(chǎn)品的經(jīng)緯度位置信息輸入到所述嚴密幾何定位模型,得到所述目標產(chǎn)品在所述遙感圖像中的成像位置。
9、根據(jù)本公開的實施例,所述基于所述成像位置與所述遙感圖像中的有效成像范圍之間的關(guān)系,確定是否發(fā)起生產(chǎn)所述目標產(chǎn)品包括:
10、在所述成像位置在所述遙感圖像中的有效成像范圍內(nèi)的情況下,發(fā)起生產(chǎn)所述目標產(chǎn)品。
11、根據(jù)本公開的實施例,所述基于所述成像位置與所述遙感圖像的有效成像范圍之間的關(guān)系,確定是否發(fā)起生產(chǎn)所述目標產(chǎn)品包括:
12、在所述成像位置不在所述遙感圖像中的有效成像范圍內(nèi)的情況下,判斷所述成像位置是否滿足預(yù)設(shè)第一條件,所述預(yù)設(shè)第一條件為所述成像位置的行位置在所述有效成像范圍的行范圍內(nèi)且所述成像位置的列位置不在所述有效成像范圍的列范圍內(nèi);
13、在所述成像位置滿足所述預(yù)設(shè)第一條件的情況下,不發(fā)起生產(chǎn)所述目標產(chǎn)品。
14、根據(jù)本公開的實施例,所述方法還包括:
15、在所述成像位置不在所述遙感圖像中的有效成像范圍內(nèi)的情況下,判斷所述成像位置是否滿足預(yù)設(shè)第二條件,所述預(yù)設(shè)第二條件為所述成像位置的行位置不在所述有效成像范圍的行范圍內(nèi)且所述成像位置的列位置在所述有效成像范圍的列范圍內(nèi);
16、在所述像素位置滿足所述預(yù)設(shè)第二條件的情況下,執(zhí)行所述實時接收衛(wèi)星發(fā)送的遙感數(shù)據(jù)的操作。
17、根據(jù)本公開的實施例,所述方法還包括:
18、在沒有接收到所述衛(wèi)星發(fā)送的遙感數(shù)據(jù)的情況下,不發(fā)起生產(chǎn)所述目標產(chǎn)品;
19、在接收到所述衛(wèi)星發(fā)送的遙感數(shù)據(jù)的情況下,執(zhí)行所述每當接收到預(yù)設(shè)數(shù)量的遙感數(shù)據(jù)時,根據(jù)目標產(chǎn)品的經(jīng)緯度位置信息,確定所述目標產(chǎn)品在所述遙感圖像中的成像位置的操作。
20、本公開的第二方面提供了一種自動目標生產(chǎn)發(fā)起裝置,所述方法包括:
21、接收模塊,用于實時接收衛(wèi)星發(fā)送的遙感數(shù)據(jù),所述遙感數(shù)據(jù)用于形成遙感圖像和有效成像范圍幾何計算;
22、第一確定模塊,用于每當接收到衛(wèi)星發(fā)送的遙感數(shù)據(jù)時,根據(jù)目標產(chǎn)品的經(jīng)緯度位置信息,確定所述目標產(chǎn)品在所述遙感圖像中的成像位置;
23、第二確定模塊,用于基于所述成像位置與所述遙感圖像的有效成像范圍之間的關(guān)系,確定是否發(fā)起生產(chǎn)所述目標產(chǎn)品。
24、本公開的第三方面提供了一種電子設(shè)備,包括:一個或多個處理器;存儲器,用于存儲一個或多個計算機程序,其中,上述一個或多個處理器執(zhí)行上述一個或多個計算機程序以實現(xiàn)上述方法的步驟。
25、本公開的第四方面還提供了一種計算機可讀存儲介質(zhì),其上存儲有計算機程序或指令,上述計算機程序或指令被處理器執(zhí)行時實現(xiàn)上述方法的步驟。
26、本公開的第五方面還提供了一種計算機程序產(chǎn)品,包括計算機程序或指令,上述計算機程序或指令被處理器執(zhí)行時實現(xiàn)上述方法的步驟。
27、根據(jù)本公開實施例提供的自動目標生產(chǎn)發(fā)起方法、裝置、設(shè)備、介質(zhì)和程序產(chǎn)品,實時接收衛(wèi)星發(fā)送的遙感數(shù)據(jù),遙感數(shù)據(jù)用于形成遙感圖像和有效成像范圍幾何計算,每當接收到預(yù)設(shè)數(shù)量的遙感數(shù)據(jù)時,根據(jù)目標產(chǎn)品的經(jīng)緯度位置信息,確定目標產(chǎn)品在遙感圖像中的成像位置,基于成像位置與遙感圖像中的有效成像范圍之間的關(guān)系,確定是否發(fā)起生產(chǎn)目標產(chǎn)品。只要目標產(chǎn)品幾何經(jīng)緯度位置正確,并且位于有效成像范圍內(nèi),可正確發(fā)起目標產(chǎn)品生產(chǎn)。
技術(shù)特征:
1.一種自動目標生產(chǎn)發(fā)起方法,其特征在于,所述方法包括:
2.根據(jù)權(quán)利要求1所述的方法,其特征在于,所述根據(jù)目標產(chǎn)品的經(jīng)緯度位置信息,確定所述目標產(chǎn)品在所述遙感圖像中的成像位置包括:
3.根據(jù)權(quán)利要求1所述的方法,其特征在于,所述基于所述成像位置與所述遙感圖像中的有效成像范圍之間的關(guān)系,確定是否發(fā)起生產(chǎn)所述目標產(chǎn)品包括:
4.根據(jù)權(quán)利要求1所述的方法,其特征在于,所述基于所述成像位置與所述遙感圖像的有效成像范圍之間的關(guān)系,確定是否發(fā)起生產(chǎn)所述目標產(chǎn)品包括:
5.根據(jù)權(quán)利要求4所述的方法,其特征在于,所述方法還包括:
6.根據(jù)權(quán)利要求5所述的方法,其特征在于,所述方法還包括:
7.一種自動目標生產(chǎn)發(fā)起裝置,其特征在于,所述裝置包括:
8.一種電子設(shè)備,包括:
9.一種計算機可讀存儲介質(zhì),其上存儲有計算機程序或指令,其特征在于,所述計算機程序或指令被處理器執(zhí)行時實現(xiàn)根據(jù)權(quán)利要求1~6中任一項所述方法的步驟。
10.一種計算機程序產(chǎn)品,包括計算機程序或指令,其特征在于,所述計算機程序或指令被處理器執(zhí)行時實現(xiàn)根據(jù)權(quán)利要求1~6中任一項所述方法的步驟。
技術(shù)總結(jié)
本公開提供了一種自動目標生產(chǎn)發(fā)起方法、裝置、設(shè)備、介質(zhì)和程序產(chǎn)品,可以應(yīng)用于衛(wèi)星數(shù)據(jù)處理技術(shù)領(lǐng)域。該方法包括:實時接收衛(wèi)星發(fā)送的遙感數(shù)據(jù),遙感數(shù)據(jù)用于形成遙感圖像和有效成像范圍幾何計算;每當接收到預(yù)設(shè)數(shù)量的遙感數(shù)據(jù)時,根據(jù)目標產(chǎn)品的經(jīng)緯度位置信息,確定目標產(chǎn)品在遙感圖像中的成像位置;基于成像位置與遙感圖像中的有效成像范圍之間的關(guān)系,確定是否發(fā)起生產(chǎn)目標產(chǎn)品。
技術(shù)研發(fā)人員:王慧賢,周光堯,胡玉新,劉方堅,石博文,劉超岳,陳國慶
受保護的技術(shù)使用者:中國科學院空天信息創(chuàng)新研究院
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!