面向多體異構的層次化外置動力學仿真方法和系統與流程
本發明涉及無人系統動力學仿真,具體涉及面向多體異構的層次化外置動力學仿真方法和系統。
背景技術:
1、隨著計算機技術的飛速發展,尤其是計算能力和存儲容量的顯著提升,對復雜物理系統的高精度仿真成為可能。高效的數值計算方法和先進的算法為無人系統動力學仿真提供了強有力的支持。目前,越來越多的仿真引擎和仿真軟件能夠實現細粒度、高保真的無人系統動力學仿真,全面模擬復雜系統的運動規律和性能表現,為產品設計和科學研究提供準確可靠的支持。
2、然而,現有技術中通常采用內置模型或代碼集成的方式進行動力學仿真,這些方案存在以下缺陷:首先,靈活性低,動力學模型固定,難以調整模型參數;其次,仿真過程僵化,難以適應多變的無人系統需求;最后,集成難度高,需要熟悉仿真引擎內部邏輯才能進行集成或修改動力學模型。
技術實現思路
1、為解決現有技術中的上述問題,本發明提出了面向多體異構的層次化外置動力學仿真方法和系統,通過獨立于仿真引擎的參數配置項或文件來控制動力學模型的設定,減少對仿真引擎代碼的侵入,顯著提升多體異構動力學仿真的靈活性和適配性;解決背景技術存在的問題。
2、本發明所述的面向多體異構的層次化外置動力學仿真方法,包括以下步驟:
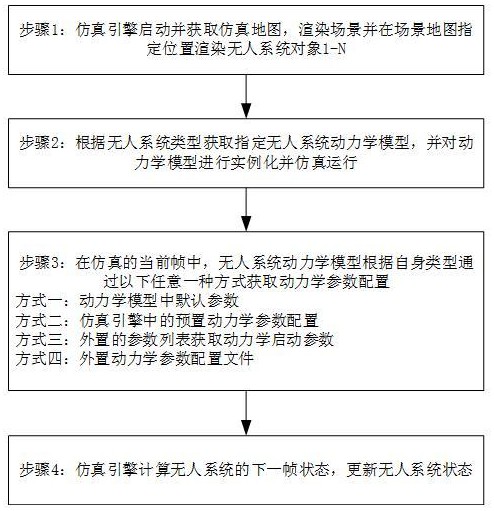
3、(1)仿真引擎啟動并獲取仿真地圖,渲染場景并在場景地圖指定位置渲染無人系統對象1-n;
4、(2)根據無人系統類型獲取指定無人系統動力學模型,并對動力學模型進行實例化并仿真運行;
5、(3)在仿真的當前幀中,無人系統動力學模型根據自身類型通過以下任意一種方式獲取動力學參數配置:
6、方式一:無人系統動力學模型根據自身類型,通過動力學模型中默認的參數配置;
7、方式二:無人系統動力學模型根據自身類型,從仿真引擎中的預置動力學參數配置;
8、方式三:無人系統動力學模型根據自身類型,在仿真引擎運行時,從外置的參數列表獲取動力學啟動參數;
9、方式四:無人系統動力學模型根據自身類型,獲取外置動力學參數配置文件;
10、(4)仿真引擎計算無人系統的下一幀狀態,更新無人系統狀態。
11、進一步的,步驟(1)中,無人系統包括陸地無人系統、空中無人系統和海洋無人系統。
12、進一步的,步驟(2)中,無人系統動力學模型與無人系統虛擬模型是一對一的對應關系,其對應關系由無人系統類型進行確定。
13、進一步的,步驟(3)中,動力學參數配置包括預置參數、啟動參數和外置參數文件多種優先級配置模式。
14、進一步的,步驟(3)中,動力學參數配置的方式一、方式二、方式三和方式四的優先級依次遞增。
15、進一步的,步驟(3)中,仿真引擎包括虛幻4、unity等仿真引擎程序。
16、本發明所述的面向多體異構的層次化外置動力學仿真系統,包括:
17、仿真引擎模塊:用于渲染并運行仿真場景、無人系統虛擬模型和動力學模型等,實現虛擬世界的仿真;
18、仿真場景模塊:用于基于想定運行于仿真引擎中的虛擬世界,包括場景地圖、動靜態要素、天氣和光照等;
19、無人系統虛擬模型:用于仿真場景中運行的無人系統,包括無人車、無人機或無人船等;
20、無人系統動力學模型:用于針對無人系統運動時的運動學和動力學等的仿真模型;
21、動力學預置參數模塊:用于基于不同無人系統類型和型號,對動力學模型的配置參數進行預定義;
22、動力學啟動參數模塊:用于在仿真引擎啟動時傳遞的運行參數,該運行參數針對不同無人系統類型進行分別傳遞;
23、動力學參數文件模塊:用于獨立于仿真引擎之外的無人系統動力學參數配置文件,針對不同無人系統類型分別定義和儲存。
24、本發明所述的一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,所述計算機程序被加載至處理器時實現任一項所述的面向多體異構的層次化外置動力學仿真方法。
25、本發明所述的一種存儲介質,所述存儲介質存儲有計算機程序,所述計算機程序被處理器執行時實現任一項所述的面向多體異構的層次化外置動力學仿真方法。
26、有益效果:與現有技術相比,本發明具有以下優點:本發明將動力學模型的參數從模型內部移到外部配置文件中,避免了頻繁修改和重編譯仿真引擎的核心代碼,減少了代碼的侵入性,使得模型的更新和維護更加簡便。本發明能夠處理多種不同類型的無人系統(如無人機、無人車、無人船等),支持這些異構無人系統的同時仿真。通過提供統一的接口和參數化方法,減少了不同無人系統動力學模型之間的差異性,簡化了仿真過程。本發明提供了預置參數、啟動參數和參數文件等多種參數配置模式,用戶可以根據不同的需求和場景選擇最合適的參數配置方式。這種靈活的參數配置模式減少了用戶在調試和集成動力學模型時的工作量,降低了調試和集成的成本,加速了仿真模型的迭代和優化過程,提高了開發效率。
技術特征:
1.一種面向多體異構的層次化外置動力學仿真方法,其特征在于,包括以下步驟:
2.根據權利要求1所述的面向多體異構的層次化外置動力學仿真方法,其特征在于,步驟(1)中,無人系統包括陸地無人系統、空中無人系統和海洋無人系統。
3.根據權利要求1所述的面向多體異構的層次化外置動力學仿真方法,其特征在于,步驟(2)中,無人系統動力學模型與無人系統虛擬模型是一對一的對應關系,其對應關系由無人系統類型進行確定。
4.根據權利要求1所述的面向多體異構的層次化外置動力學仿真方法,其特征在于,步驟(3)中,動力學參數配置包括預置參數、啟動參數和外置參數文件多種優先級配置模式。
5.根據權利要求1所述的面向多體異構的層次化外置動力學仿真方法,其特征在于,步驟(3)中,動力學參數配置的方式一、方式二、方式三和方式四的優先級依次遞增。
6.根據權利要求1所述的面向多體異構的層次化外置動力學仿真方法,其特征在于,步驟(3)中,仿真引擎包括虛幻4、unity仿真引擎程序。
7.一種面向多體異構的層次化外置動力學仿真系統,其特征在于,包括:
8.一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,其特征在于,所述計算機程序被加載至處理器時實現根據權利要求1-6任一項所述的面向多體異構的層次化外置動力學仿真方法。
9.一種存儲介質,所述存儲介質存儲有計算機程序,其特征在于,所述計算機程序被處理器執行時實現根據權利要求?1-6任一項所述的面向多體異構的層次化外置動力學仿真方法。
技術總結
本發明公開了面向多體異構的層次化外置動力學仿真方法和系統,所述方法包括以下步驟:(1)仿真引擎啟動并獲取仿真地圖,渲染場景并在場景地圖指定位置渲染無人系統對象1?N;(2)根據無人系統類型獲取指定無人系統動力學模型,并對動力學模型進行實例化并仿真運行;(3)在仿真的當前幀中,無人系統動力學模型根據自身類型通過4種方式獲取動力學參數配置;(4)仿真引擎計算無人系統的下一幀狀態,更新無人系統狀態;本發明加速了仿真模型的迭代和優化過程,提高了開發效率。
技術研發人員:吳祥,薛松,高卉
受保護的技術使用者:中科南京軟件技術研究院
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!