一種低功耗自修復與能量自供給的礦井粉塵監(jiān)測傳感器網(wǎng)絡(luò)系統(tǒng)的制作方法
本發(fā)明涉及礦井粉塵監(jiān)測技術(shù),具體是一種低功耗自修復與能量自供給的礦井粉塵監(jiān)測傳感器網(wǎng)絡(luò)系統(tǒng),適用于長期監(jiān)測礦井中粉塵濃度及相關(guān)環(huán)境參數(shù),保障礦山作業(yè)安全與工人健康。
背景技術(shù):
1、礦井環(huán)境復雜、惡劣,粉塵濃度過高不僅對設(shè)備運轉(zhuǎn)構(gòu)成威脅,且長期暴露于高濃度粉塵中將對礦工的健康產(chǎn)生嚴重影響。因此,礦井粉塵監(jiān)測成為確保礦山安全生產(chǎn)的重要手段。然而,現(xiàn)有的粉塵監(jiān)測系統(tǒng)普遍存在能耗高、供電困難、設(shè)備易損壞及節(jié)點失效導致監(jiān)測中斷等問題。同時,礦井中傳感器設(shè)備的更換或維護成本較高。因此,現(xiàn)有技術(shù)急需一種具備低功耗、能量自供給和自修復能力的粉塵監(jiān)測網(wǎng)絡(luò),以提高系統(tǒng)在惡劣環(huán)境中的工作穩(wěn)定性與可靠性。
技術(shù)實現(xiàn)思路
1、本發(fā)明旨在至少解決現(xiàn)有技術(shù)中存在的技術(shù)問題,特別創(chuàng)新地提出了一種低功耗自修復與能量自供給的礦井粉塵監(jiān)測傳感器網(wǎng)絡(luò)系統(tǒng)。
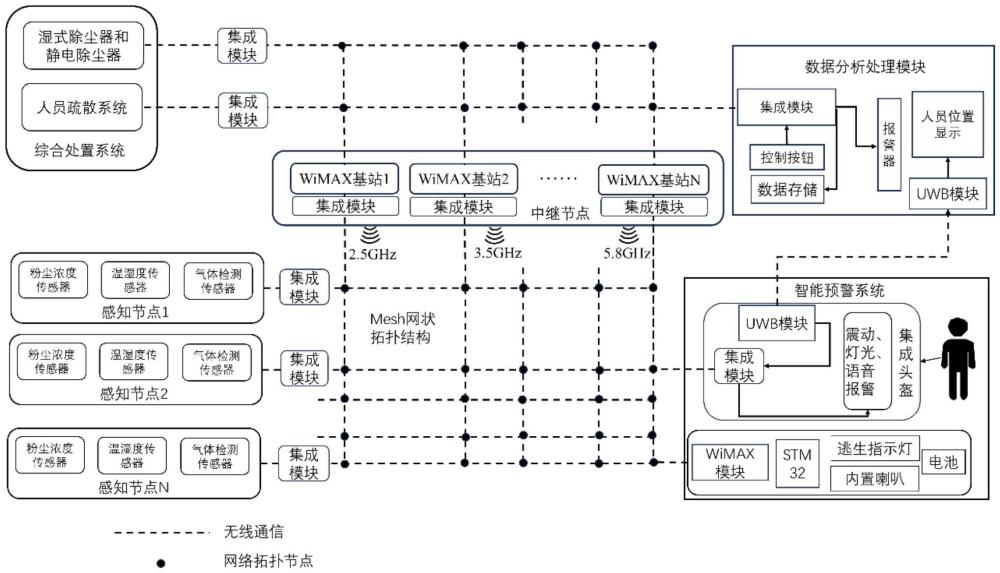
2、為了實現(xiàn)本發(fā)明的上述目的,本發(fā)明提供了一種低功耗自修復與能量自供給的礦井粉塵監(jiān)測傳感器網(wǎng)絡(luò)系統(tǒng),包括多個傳感器節(jié)點和中央監(jiān)控平臺,所有傳感器節(jié)點的數(shù)據(jù)實時傳輸至中央監(jiān)控平臺;所述傳感器網(wǎng)絡(luò)通過多參數(shù)傳感器同步監(jiān)測粉塵濃度、粒徑分布、氣流速度及溫濕度等環(huán)境參數(shù),并在中央監(jiān)控平臺上進行數(shù)據(jù)分析、處理與可視化展示;每個傳感器節(jié)點內(nèi)部集成了多個傳感器,所述傳感器用于監(jiān)測礦井環(huán)境中不同的環(huán)境參數(shù);所述傳感器的種類包括粉塵濃度傳感器、溫濕度傳感器,所述環(huán)境參數(shù)包括粉塵濃度、溫濕度;傳感器節(jié)點作為這些傳感器的載體和集成平臺,實現(xiàn)了多種環(huán)境參數(shù)的同步監(jiān)測。
3、所述傳感器節(jié)點包括多源能量收集模塊和低功耗管理模塊;
4、其中,多源能量收集模塊集成了壓電能量收集裝置、微型氣流渦輪和溫差發(fā)電單元,用于從礦井環(huán)境的機械振動、氣流動能及溫差中收集能量并轉(zhuǎn)化為電能,實現(xiàn)傳感器的自供電;此外,傳感器節(jié)點具備環(huán)境自適應(yīng)功能,能夠根據(jù)礦井內(nèi)的風速、振動或溫度變化,自動調(diào)整能量收集模塊的工作狀態(tài),以優(yōu)化能量收集效率。
5、低功耗管理模塊用于根據(jù)傳感器電量及環(huán)境狀況動態(tài)調(diào)整傳感器的工作模式,實現(xiàn)功耗最小化;所述工作模式包括待機和監(jiān)測兩種模式,當環(huán)境參數(shù)在設(shè)定的時間段中保持在預設(shè)的波動值范圍內(nèi),傳感器節(jié)點在無重大環(huán)境變化時,進入低功耗待機模式;當環(huán)境參數(shù)在設(shè)定的時間段中超過設(shè)定的閾值時自動激活進入高精度監(jiān)測模式。
6、優(yōu)選地,所述所有傳感器節(jié)點的數(shù)據(jù)都被實時傳輸至中央監(jiān)控平臺,是通過集成模塊實現(xiàn)的,傳感器節(jié)點通過集成模塊將數(shù)據(jù)傳輸給wimax基站;所述集成模塊包括:無線通信模塊(即wimax模塊)、多頻段切換模塊和控制器(stm32單片機);所有傳感器節(jié)點通過無線通信模塊相互連接,形成自組織網(wǎng)絡(luò)。其中無線通信模塊通過spi通訊與控制器機相連,多頻段切換模塊通過spi、i2c、uart、gpio之一或者任意組合的通訊方式與控制器相連;
7、所述多頻段切換模塊用于根據(jù)傳感器的位置切換電磁波的頻率范圍,實現(xiàn)低頻段(如2.5ghz)和高頻段(如5.8ghz)的切換;終端設(shè)備距離基站較遠時,系統(tǒng)會自動切換到低頻段,以保證信號強度。當設(shè)備靠近基站時,則優(yōu)先選擇高頻段,以獲得更高的數(shù)據(jù)傳輸速率。
8、多頻段切換模塊與stm32單片機通信連接時,定義各個串口之間的功能如下:uart(通用異步收發(fā)模塊):用于點對點通信,傳輸控制指令和反饋數(shù)據(jù)。spi(串行外設(shè)接口):用于高速數(shù)據(jù)傳輸,如頻段設(shè)置和頻率合成器參數(shù)的配置。i2c(雙線接口):用于頻段狀態(tài)數(shù)據(jù)的采集和多模塊協(xié)作。接口連接:stm32的相關(guān)串口(如usart1、spi1)與頻段切換模塊的控制端直接連接,同時配置必要的gpio用于中斷和狀態(tài)指示。
9、數(shù)據(jù)傳輸協(xié)議:指令格式:采用自定義指令協(xié)議,數(shù)據(jù)包格式包括以下部分:起始位(1字節(jié)):標識數(shù)據(jù)包的開始,常用固定值如0xaa。指令類型(1字節(jié)):定義具體操作類型,例如切換頻段、查詢狀態(tài)。參數(shù)數(shù)據(jù)(2-4字節(jié)):根據(jù)指令需要攜帶的具體參數(shù),如目標頻段值。校驗位(1字節(jié)):通過校驗和/crc校驗,確保數(shù)據(jù)完整性。結(jié)束位(1字節(jié)):標識數(shù)據(jù)包的結(jié)束,常用固定值如0xff。通信速率:uart速率常設(shè)置為9600bps或115200bps。切換流程為:當stm32檢測到當前頻段干擾嚴重(通過信號強度、誤碼率等參數(shù)),觸發(fā)切換流程:stm32根據(jù)算法選擇新頻段,并通過串口發(fā)送切換指令。頻段切換模塊調(diào)整頻率合成器,切換至目標頻段。切換完成后,模塊反饋狀態(tài)至stm32,確保頻段切換成功。
10、優(yōu)選地,所述集成模塊還包括自動路由模塊,自動路由模塊通過spi、i2c、uart、gpio之一或者任意組合的通訊方式與控制器相連;
11、所述自動路由模塊用于根據(jù)傳感器的位置變化和網(wǎng)絡(luò)拓撲結(jié)構(gòu)的變化,自動調(diào)整數(shù)據(jù)傳輸路徑;該模塊通過檢測每個設(shè)備的實時位置信息和信號強度,確定最優(yōu)的通信路徑,尤其是在信號遮擋和設(shè)備移動頻繁的情況下,通過自動路由保證了網(wǎng)絡(luò)的連通性和傳輸效率。
12、所述傳感器網(wǎng)絡(luò)為自修復網(wǎng)絡(luò),傳感器節(jié)點具備分布式自組織網(wǎng)絡(luò)功能,一旦檢測到某傳感器節(jié)點失效或通信中斷,臨近的傳感器節(jié)點通過動態(tài)路由算法自動調(diào)整數(shù)據(jù)傳輸路徑,并自動重建通信路徑,從而確保網(wǎng)絡(luò)穩(wěn)定性與數(shù)據(jù)傳輸?shù)倪B續(xù)性。
13、優(yōu)選地,所述傳感器的種類還包括氣體檢測傳感器,所述環(huán)境參數(shù)還包括氣流速度。
14、優(yōu)選地,所述傳感器節(jié)點具備溫濕度補償功能,能夠根據(jù)環(huán)境中的溫濕度變化動態(tài)調(diào)整粉塵濃度監(jiān)測結(jié)果,確保在不同氣候條件下的監(jiān)測精度:
15、s1,系統(tǒng)通過傳感器節(jié)點中的溫濕度傳感器實時采集環(huán)境溫度和濕度數(shù)據(jù),同時粉塵濃度傳感器測量顆粒物濃度(通常以mg/m3為單位);所述采集環(huán)境溫度和濕度數(shù)據(jù)由控制器(stm32單片機)處理,濾除噪聲或異常數(shù)據(jù),確保輸入數(shù)據(jù)的準確性;粉塵濃度傳感器的原始信號也通過濾波去除尖峰干擾,以提高測量值的真實性。
16、s2,采集到的數(shù)據(jù)經(jīng)過初步校準后,進入補償計算階段;控制器基于預先建立的補償模型動態(tài)調(diào)整粉塵濃度測量值,考慮溫度和濕度對粉塵特性的不同影響。例如,在高濕度條件下,顆粒物的吸濕性會導致測量值偏高,此時需要降低濃度值進行修正;而在高溫環(huán)境下,空氣密度的變化可能對顆粒物的光散射特性產(chǎn)生影響,粉塵濃度數(shù)值需要通過以下公式進行補償:
17、ccorrected=cmeasured×(1-krh·rh)×(1+kt·(t-tref))×(1+kdust·pdust)
18、其中,ccorrected表示補償后的粉塵濃度數(shù)值;
19、cmeasured表示原始的粉塵濃度測量數(shù)值,即粉塵濃度傳感器測得的粉塵濃度值;
20、krh和kt分別表示濕度和溫度補償系數(shù),對于煤塵等不吸濕顆粒來說,krh≈0,而對于吸濕的巖塵等,krh=0.1-0.2;
21、rh為煤礦井下的實時濕度;
22、t為煤礦井下實時溫度;
23、tref為參考溫度,一般為儀器標定時的室溫;
24、kt為溫度補償系數(shù),反映溫度對測量系統(tǒng)或顆粒散射的影響,通常為0.01-0.05;
25、pdust為礦井粉塵中煤塵所占的比例;對于煤塵占比pdust可以通過對煤礦粉塵進行采樣,通過化學成分分析確定所有粉塵中煤塵的含量占比。
26、kdust為粉塵種類補償系數(shù),反應(yīng)礦井下不同粉塵種類。
27、優(yōu)選地,濕度補償系數(shù)krh、溫度補償系數(shù)kt的標定包括與以下步驟:
28、(1)確定基準條件
29、基準粉塵濃度:使用參考濃度測量裝置,在基準濕度/溫度條件下測量粉塵濃度,記錄為ctrue;
30、(2)改變濕度/溫度條件
31、將濕度/溫度逐步調(diào)整至目標范圍內(nèi)的多個值(如10%、30%、50%、70%、90%等),每個濕度/溫度點保持穩(wěn)定,記錄實際濕度/溫度值為rhi;
32、(3)測量濃度變化
33、在每個濕度/溫度條件下,使用粉塵監(jiān)測設(shè)備測量粉塵濃度,記錄為cmeasured,i;重復測量多次,確保數(shù)據(jù)的準確性。
34、(4)計算濕度/溫度修正因子;
35、對于每個濕度/溫度值,計算濃度誤差比:
36、δci=(cmeasured,i-ctrue)/ctrue
37、其中,δci為測量誤差的相對值;
38、(5)擬合濕度/溫度修正模型;
39、將濕度/溫度與濃度誤差比建立線性或非線性關(guān)系:
40、δci=krh·rhi
41、δci=kt·rhi
42、對實驗數(shù)據(jù)進行線性回歸,擬合出濕度補償系數(shù)krh和溫度補償系數(shù)kt。
43、在實時監(jiān)測過程中,控制器結(jié)合多種溫濕度傳感器,通過內(nèi)置的算法動態(tài)獲取當前溫濕度,及時更新補償參數(shù)。經(jīng)過補償后的粉塵濃度值由控制器傳輸至顯示設(shè)備或監(jiān)測中心,數(shù)據(jù)輸出的同時還包括當前的環(huán)境溫濕度信息,以提供更全面的環(huán)境狀態(tài)參考。
44、優(yōu)選地,其中多源能量收集模塊為傳感器節(jié)點和mesh傳感網(wǎng)絡(luò)提供能量,并將多余的能量存儲于冗余能量儲存單元中;所述冗余能量儲存單元包括并聯(lián)的超級電容和高效鋰電池;
45、所述多源能量收集模塊為傳感器節(jié)點提供能量包括:
46、壓電能量收集裝置提供的能量用于當前傳感器的采樣任務(wù)以及無線通信模塊;
47、微型氣流渦輪的穩(wěn)定輸出能量用于無線通信模塊;
48、溫差電池的能量用于冗余能量儲存單元;
49、s100,判斷壓電能量收集裝置提供的能量是否滿足當前采樣任務(wù)所需的能量,若滿足,跳轉(zhuǎn)執(zhí)行s200;若不滿足,則調(diào)用冗余能量儲存單元的能量用于當前采樣任務(wù);
50、s200,判斷微型氣流渦輪的穩(wěn)定輸出能量是否滿足當前無線通信模塊所需的能量,若滿足,則無需其余操作,并將多余的能量存儲于冗余能量儲存單元;若不滿足,則執(zhí)行下一步驟;
51、s300,判斷壓電能量收集裝置的多余能量是否滿足無線通信模塊所需的多余能量,若滿足,則壓電能量收集裝置提供的能量用于無線通信模塊,并將多余的能量存儲于冗余能量儲存單元;若不滿足,則調(diào)用冗余能量儲存單元的能量用于無線通信模塊;所述壓電能量收集裝置的多余能量為壓電能量收集裝置提供的能量與當前采樣任務(wù)所需的能量的差值,所述無線通信模塊所需的多余能量為微型氣流渦輪的穩(wěn)定輸出能量與當前無線通信模塊所需的能量的差值。
52、優(yōu)選地,步驟s100~s300還包括:
53、(1)根據(jù)采樣任務(wù)和通信的能量需求,首先使用即時能量:
54、ep-usage(t)=min(ep(t),ec(t)+ecom(t))
55、et-usage(t)=min(et(t),ecom(t)-et-usage(t-1))
56、其中,ep-usage(t)表示在時間t時刻,壓電能量被分配給當前采樣任務(wù)和通信模塊的能量;
57、ep(t)表示在時間t時刻,來自壓電材料的瞬時輸出能量;
58、ec(t)表示在時間t時刻,芯片當前采樣任務(wù)的能量需求;
59、ecom(t)表示在時間t時刻,通信模塊的能量需求;
60、et-usage(t)表示在時間t時刻,渦輪能量被分配給通信模塊的能量;
61、et(t)表示在時間t時刻,來自渦輪的穩(wěn)定輸出能量;
62、et-usage(t-1)表示前一時刻渦輪已分配的能量,防止渦輪能源重復計算;
63、(2)計算剩余多余能量:當壓電和渦輪無法滿足所有需求時,計算剩余能量供冗余能量儲存單元使用:
64、eexcess(t)=ep(t)+et(t)+ed(t)-(ec(t)+ecom(t))
65、其中,eexcess(t)表示剩余能量;
66、ed(t)表示在時間t時刻,來自溫差電池的輸出能量;
67、(3)對冗余能量儲存單元充電時的能量分配策略
68、當eexcess(t)>0,首先為超級電容充電:
69、ecap-charging(t)=min(ηcap·eexcess(t),ecap-max-ecap(t))
70、其中,ecap-charging(t)表示超級電容充電的能量;
71、ηcap表示超級電容的充電效率;
72、ecap-max為超級電容的最大儲能容量;
73、ecap(t)表示超級電容的當前儲能量;
74、然后,再將剩余能量用于鋰離子電池充電:
75、eli-charging(t)=max(0,ηli(eexcess(t)-ecap-charging(t))
76、其中,eli-charging(t)表示鋰電池充電的能量;
77、ηli表示鋰離子電池的充電效率;
78、(4)冗余能量儲存單元充電更新,更新超級電容和鋰電池的能量狀態(tài):
79、ecap(t+1)=ecap(t)+ecap-charging(t)
80、eli(t+1)=eli(t)+eli-charging(t)
81、其中,eli(t)表示鋰離子電池的當前儲能量。
82、優(yōu)選地,首先為冗余能量儲存單元的超級電容充電,當超級電容充滿時,再為鋰離子電池充電。此策略能夠提高能量的響應(yīng)速度,并降低對傳統(tǒng)儲能系統(tǒng)的依賴。
83、優(yōu)選地,步驟s100~s300的目標是最大化瞬時能量的使用效率,同時最小化對冗余能量儲存單元的依賴,其目標函數(shù)為:
84、efficiency(t)=(ep-usage(t)+et-usage(t))/(ec(t)+ecom(t))
85、其中,ep-usage(t)表示在時間t時刻,壓電能量被分配給當前任務(wù)和通信模塊的能量;
86、et-usage(t)表示在時間t時刻,渦輪能量被分配給通信模塊的能量;
87、ec(t)表示在時間t時刻,芯片當前采樣任務(wù)的能量需求;
88、ecom(t)表示在時間t時刻,通信模塊的能量需求。
89、該效率函數(shù)用來評估瞬時能量的使用效率,當該值接近1時,表示瞬時能量得到了最大化利用,減少了對冗余能量儲存單元的依賴。
90、綜上所述,由于采用了上述技術(shù)方案,本發(fā)明通過多源環(huán)境能量收集模塊,為傳感器節(jié)點提供自供電能力,并通過智能功耗管理機制和自修復網(wǎng)絡(luò)結(jié)構(gòu),保證設(shè)備在長時間內(nèi)持續(xù)穩(wěn)定運行。系統(tǒng)能夠?qū)崟r監(jiān)測礦井中粉塵濃度、顆粒物粒徑、氣流速度及溫濕度等環(huán)境參數(shù),并將數(shù)據(jù)通過無線通信模塊傳輸至中央監(jiān)控平臺進行處理和分析。
91、本發(fā)明的附加方面和優(yōu)點將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本發(fā)明的實踐了解到。
- 還沒有人留言評論。精彩留言會獲得點贊!