基于高精度通信定位模組的共享單車丟失定位系統的制作方法
本發明涉及共享單車丟失定位,具體為基于高精度通信定位模組的共享單車丟失定位系統。
背景技術:
1、共享單車定位,目前主要依賴在車輛上所綁定的定位設備,定位設備通過備gps或者北斗定位進行定位之后,再通過物聯網卡上傳更新車輛位置。由于gps定位的精度會受到很多環境因素的影響,且因為電量和流量的限制,位置更新的頻率不宜太快,因此,車輛的位置可能不準,或者存在延遲,這些都會影響正常的單車業務,從而導致在單車位置判斷上會產生誤判的情況發生。
技術實現思路
1、(一)解決的技術問題
2、針對現有技術的不足,本發明提供了基于高精度通信定位模組的共享單車丟失定位系統,具備定位判斷準確等優點,解決了上述技術問題。
3、(二)技術方案
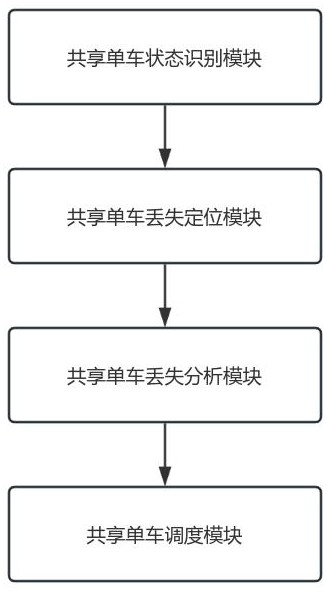
4、為實現上述目的,本發明提供如下技術方案:基于高精度通信定位模組的共享單車丟失定位系統,包括共享單車狀態識別模塊、共享單車丟失定位模塊、共享單車丟失分析模塊和共享單車調度模塊;
5、所述共享單車狀態識別模塊用于判斷當前共享單車的狀態,當前共享單車的狀態包括停車后搬運狀態、騎行狀態和丟失狀態,并基于當前共享單車的狀態判斷是否需要調用共享單車丟失定位模塊,所述共享單車狀態識別模塊在判斷當前共享單車的狀態為丟失狀態時,調用共享單車丟失定位模塊進行丟失定位;
6、所述共享單車丟失定位模塊包括定位發送模塊、軌跡確定模塊和軌跡推算模塊,所述定位發送模塊內搭載了定位模組,用于發送其對應的實時定位,所述軌跡確定模塊用于結合共享單車還車點之間的距離以及定位位置時刻記錄當前丟失車輛的運動軌跡和當前位置,并將當前丟失車輛的運動軌跡發送到共享單車丟失分析模塊中,所述軌跡推算模塊用于在共享單車定位信號被屏蔽時,給出模糊運動軌跡;
7、所述共享單車丟失分析模塊用于對所有還車點丟失情況以及丟失車輛的運動軌跡的終點進行分析,并得到每個還車點的共享單車丟失風險;
8、所述共享單車調度模塊用于讀取共享單車丟失定位模塊中丟失車輛的運動軌跡的終點或模糊運動軌跡來對周圍所有調度人員進行調度尋找,在找到后對車輛進行調度檢修。
9、作為本發明的優選技術方案,所述共享單車狀態識別模塊判斷當前共享單車的狀態的具體步驟如下:
10、步驟a1:判斷共享單車是否正在運動,若在運動則判斷是否為騎行狀態,若正在被騎行則執行步驟a2,若沒有被騎行,則執行步驟a4;
11、步驟a2:檢測共享單車的位置若處于還車范圍內,若處于還車范圍內,則終止判斷,若共享單車觸發還車范圍外斷電道釘,則對共享單車進行斷電,并執行步驟a3;
12、步驟a3:在共享單車斷電后,仍然產生移動的且并未在一個間隔時間內進入到還車范圍內的車輛標記為丟失狀態,并調用共享單車丟失定位模塊進行丟失定位;
13、步驟a4:將共享單車的狀態設置為停車后搬運狀態,同時計算共享單車是否處于還車點的安全范圍,若處于則終止判斷,若不處于還車點的安全距離,則計算其與還車點范圍的最小距離,若超出最小距離的判斷閾值,則判斷當前共享單車的狀態為丟失狀態,此時調用共享單車丟失定位模塊進行丟失定位。
14、作為本發明的優選技術方案,所述步驟a4中計算共享單車是否處于還車點的安全范圍的具體表達式如下:
15、
16、其中,表示判斷值,當時則共享單車處于還車點的安全范圍,當時則共享單車不處于還車點的安全范圍,表示與操作,,分別表示矩形還車點范圍的兩個對角點坐標,和分別表示在條件、下的判斷函數,當內部條件、滿足時輸出值為。
17、作為本發明的優選技術方案,所述步驟a4中計算其與還車點范圍的最小距離的具體表達式如下:
18、
19、其中,表示共享單車與還車點范圍的最小距離,為還車點范圍中心點坐標,,分別表示矩形還車點范圍的兩個對角點坐標。
20、作為本發明的優選技術方案,所述還車點范圍中心點坐標的具體表達式如下:
21、
22、
23、其中,,分別表示矩形還車點范圍的兩個對角點坐標,表示還車點范圍中心點坐標,當時判斷當前共享單車的狀態為丟失狀態,當時,判斷當前共享單車的狀態不為丟失狀態。
24、作為本發明的優選技術方案,所述共享單車丟失定位模塊中的軌跡確定模塊結合共享單車還車點之間的距離以及定位位置時刻記錄當前丟失車輛的運動軌跡和當前位置的具體步驟如下:
25、步驟b1:當共享單車被判斷為丟失狀態時,讀取當前共享單車所有經過還車點的坐標;
26、步驟b2:將所有點位輸出至地圖上,并繪制成路徑曲線,并發送駛離還車范圍最近的還車點和起始點位坐標與路徑曲線發送到共享單車丟失分析模塊中。
27、作為本發明的優選技術方案,所述軌跡推算模塊在共享單車定位信號被屏蔽時,給出模糊運動軌跡的具體步驟如下:
28、步驟c1:當共享單車在一個時間間隔未發送定位坐標時,讀取時刻的坐標和時刻的坐標;
29、步驟c2:計算時刻的坐標和時刻的坐標共享單車的運動速度,并以時刻的坐標和時刻的坐標共享單車的運動方向查找分岔路口,并計算共享單車預計點位發送到共享單車調度模塊中,直到共享單車反饋實時定位。
30、作為本發明的優選技術方案,所述步驟c2中計算共享單車預計點位的具體過程為:以時刻的坐標和時刻的坐標共享單車的運動速度沿著當前運動方向的所有路段,按照的距離間隔的區域作為共享單車預計點位,其中以時刻的坐標和時刻的坐標共享單車的運動速度的具體表達式如下:
31、
32、其中,表示間隔時間,表示時刻的運動速度。
33、作為本發明的優選技術方案,所述共享單車丟失分析模塊對所有還車點丟失情況以及丟失車輛的運動軌跡的終點進行分析,并得到每個還車點的共享單車丟失風險的表達式如下:
34、
35、其中,表示共享單車丟失風險,表示當前還車點丟失次數,表示所有還車點丟失次數。
36、作為本發明的優選技術方案,所述共享單車調度模塊對調度人員進行調度時,將工作人員調度至所有共享單車預計點位進行等候。
37、與現有技術相比,本發明提供了基于高精度通信定位模組的共享單車丟失定位系統,具備以下有益效果:
38、本發明通過判斷當前共享單車的狀態,若車輛狀態為丟失狀態,并結合共享單車還車點之間的距離以及定位位置時刻記錄當前丟失車輛的運動軌跡和當前位置之后,基于丟失車輛的運動軌跡的終點或模糊運動軌跡來對周圍所有調度人員進行調度尋找,在找到后對車輛進行調度檢修,從而能夠對單車進行準確定位,并在沒有信號時對單車位置進行預測。
技術特征:
1.基于高精度通信定位模組的共享單車丟失定位系統,其特征在于:包括共享單車狀態識別模塊、共享單車丟失定位模塊、共享單車丟失分析模塊和共享單車調度模塊;
2.根據權利要求1所述的基于高精度通信定位模組的共享單車丟失定位系統,其特征在于:所述共享單車狀態識別模塊判斷當前共享單車的狀態的具體步驟如下:
3.根據權利要求2所述的基于高精度通信定位模組的共享單車丟失定位系統,其特征在于:所述步驟a4中計算共享單車是否處于還車點的安全范圍的具體表達式如下:
4.根據權利要求2所述的基于高精度通信定位模組的共享單車丟失定位系統,其特征在于:所述步驟a4中計算其與還車點范圍的最小距離的具體表達式如下:
5.根據權利要求4所述的基于高精度通信定位模組的共享單車丟失定位系統,其特征在于:所述還車點范圍中心點坐標的具體表達式如下:
6.根據權利要求2所述的基于高精度通信定位模組的共享單車丟失定位系統,其特征在于:所述共享單車丟失定位模塊中的軌跡確定模塊結合共享單車還車點之間的距離以及定位位置時刻記錄當前丟失車輛的運動軌跡和當前位置的具體步驟如下:
7.根據權利要求6所述的基于高精度通信定位模組的共享單車丟失定位系統,其特征在于:所述軌跡推算模塊在共享單車定位信號被屏蔽時,給出模糊運動軌跡的具體步驟如下:
8.根據權利要求7所述的基于高精度通信定位模組的共享單車丟失定位系統,其特征在于:所述步驟c2中計算共享單車預計點位的具體過程為:以時刻的坐標和時刻的坐標共享單車的運動速度沿著當前運動方向的所有路段,按照的距離間隔的區域作為共享單車預計點位,其中以時刻的坐標和時刻的坐標共享單車的運動速度的具體表達式如下:
9.根據權利要求8所述的基于高精度通信定位模組的共享單車丟失定位系統,其特征在于:所述共享單車丟失分析模塊對所有還車點丟失情況以及丟失車輛的運動軌跡的終點進行分析,并得到每個還車點的共享單車丟失風險的表達式如下:
10.根據權利要求7所述的基于高精度通信定位模組的共享單車丟失定位系統,其特征在于:所述共享單車調度模塊對調度人員進行調度時,將工作人員調度至所有共享單車預計點位進行等候。
技術總結
本發明涉及共享單車丟失定位技術領域,且公開了基于高精度通信定位模組的共享單車丟失定位系統包括共享單車狀態識別模塊、共享單車丟失定位模塊、共享單車丟失分析模塊和共享單車調度模塊,共享單車狀態識別模塊用于判斷當前共享單車的狀態,當前共享單車的狀態包括停車后搬運狀態、騎行狀態和丟失狀態。該系統通過判斷當前共享單車的狀態,若車輛狀態為丟失狀態,并結合共享單車還車點之間的距離以及定位位置時刻記錄當前丟失車輛的運動軌跡和當前位置之后,基于丟失車輛的運動軌跡的終點或模糊運動軌跡來對周圍所有調度人員進行調度尋找,在找到后對車輛進行調度檢修,從而能夠對單車進行準確定位,并在沒有信號時對單車位置進行預測。
技術研發人員:白王明,陽云,白靈會
受保護的技術使用者:深圳市鴻啟科技有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!