一種功能性電刺激的閉環反饋控制方法
本發明涉及生物醫學工程,特別涉及一種功能性電刺激的閉環反饋控制方法。
背景技術:
1、腦卒中患者中的一部分在發病后表現為一側肢體癱瘓,具體表現為癱瘓一側肢體肌肉的肌力減退、肌張力異常以及運動功能障礙。針對這種情況,工程學領域采用功能性電刺激(functional?electrical?stimulation,fes)作為康復訓練的常見方法,以促進受影響肌肉的康復和功能改善。
2、現有技術中,在對腦卒中偏癱患者在進行功能性康復訓練時,通常使用控制器按照預先設定好的指令或程序對患側肢體進行功能性電刺激,但是,這種方式的控制精度主要依靠根據治療需求手動調整電刺激參數,無法糾正運動過程中的誤差和干擾,導致對患側肢體功能性電刺激的控制精度較低。
技術實現思路
1、基于此,有必要針對上述技術問題,提供一種功能性電刺激的閉環反饋控制方法,該方法能夠提高對患側肢體功能性電刺激的控制精度。
2、本發明采用下述技術方案:
3、本發明提供了一種功能性電刺激的閉環反饋控制方法,包括:
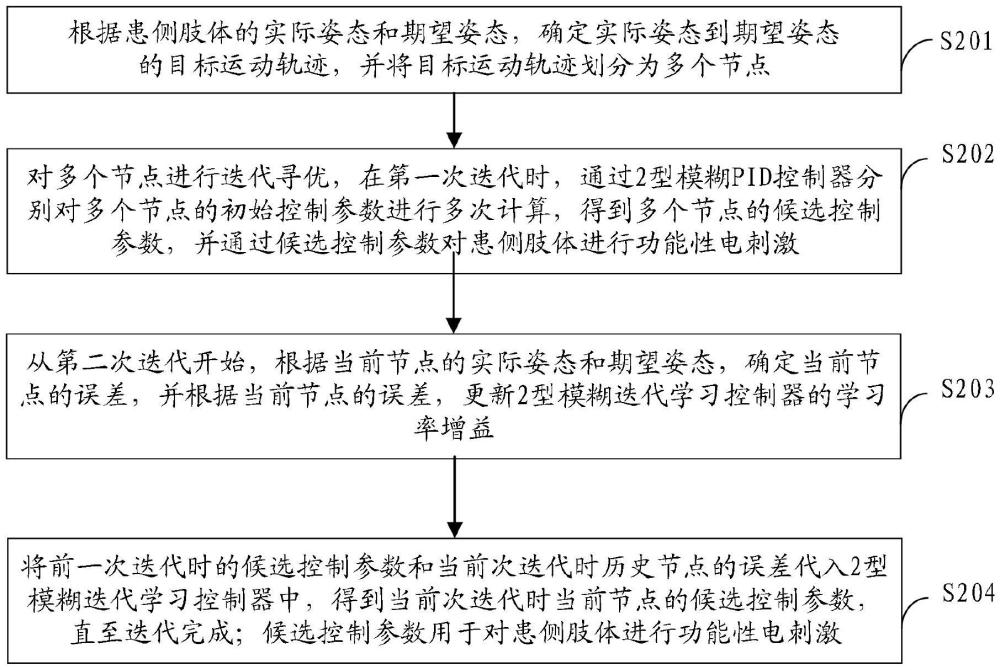
4、根據患側肢體的實際姿態和期望姿態,確定實際姿態到期望姿態的目標運動軌跡,并將目標運動軌跡劃分為多個節點;
5、對多個節點進行迭代尋優,在第一次迭代時,通過2型模糊pid控制器分別對多個節點的初始控制參數進行多次計算,得到多個節點的候選控制參數,并通過候選控制參數對患側肢體進行功能性電刺激;
6、從第二次迭代開始,根據當前節點的實際姿態和期望姿態,確定當前節點的誤差,并根據當前節點的誤差,更新2型模糊迭代學習控制器的學習率增益;
7、將前一次迭代時的候選控制參數和當前次迭代時歷史節點的誤差代入2型模糊迭代學習控制器中,得到當前次迭代時當前節點的候選控制參數,直至迭代完成;候選控制參數用于對患側肢體進行功能性電刺激。
8、優選地,根據當前節點的誤差,更新2型模糊迭代學習控制器的學習率增益,包括:
9、根據當前節點的誤差和上一節點的誤差,確定當前節點的誤差變化率;
10、對誤差變化率和誤差進行2型模糊推理,得到當前節點的學習率增益。
11、優選地,對誤差變化率和誤差進行2型模糊推理,得到當前節點的學習率增益,包括:
12、根據預設論域和隸屬度函數,將誤差變化率和誤差進行模糊化,得到誤差變化率的隸屬度和誤差的隸屬度;
13、基于模糊規則表,根據誤差變化率的隸屬度和誤差的隸屬度,確定學習率增益的期望值;
14、根據區間映射公式將學習率增益的期望值轉化為學習率增益的實際值。
15、優選地,2型模糊迭代學習控制器的控制公式為:
16、u[i+1,n]=u[i,n]+kp[n]{e[n]-e[n-1]}+ki[n]e[n]+kd[n]{e[n]-2e[n-1]+e[n-2]};
17、其中,u[i+1,n]為第i+1次迭代時第n個節點的候選控制參數,u[i,n]為第i次迭代時第n個節點的候選控制參數;kp[n]、ki[n]和kd[n]為軌跡上第n個節點的學習率增益。
18、優選地,患側肢體的實際姿態和期望姿態的獲取過程,包括:
19、通過健側肢體所佩戴的慣性測量單元采集扭矩,并將健側肢體的扭矩確定為患側肢體的期望姿態,以及通過患側肢體所佩戴的慣性測量單元采集實際姿態。
20、本發明提供了一種功能性電刺激的閉環反饋控制裝置,包括:
21、確定模塊,用于根據患側肢體的實際姿態和期望姿態,確定實際姿態到期望姿態的目標運動軌跡,并將目標運動軌跡劃分為多個節點;
22、第一迭代模塊,用于對多個節點進行迭代尋優,在第一次迭代時,通過2型模糊pid控制器分別對多個節點的初始控制參數進行多次計算,得到多個節點的候選控制參數,并通過候選控制參數對患側肢體進行功能性電刺激;
23、更新模塊,用于從第二次迭代開始,根據當前節點的實際姿態和期望姿態,確定當前節點的誤差,并根據當前節點的誤差,更新2型模糊迭代學習控制器的學習率增益;
24、第二迭代模塊,用于將前一次迭代時的候選控制參數和當前次迭代時歷史節點的誤差代入2型模糊迭代學習控制器中,得到當前次迭代時當前節點的候選控制參數,直至迭代完成;候選控制參數用于對患側肢體進行功能性電刺激。
25、本發明提供了一種計算機可讀存儲介質,所述存儲介質存儲有計算機程序,所述計算機程序被stm32或其他微控制器的處理器執行時實現上述功能性電刺激的閉環反饋控制方法。
26、本發明提供了一種計算機設備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,所述處理器為stm32或其他微控制器的處理器,所述處理器執行所述程序時實現上述功能性電刺激的閉環反饋控制方法。
27、本發明采用的上述至少一個技術方案能夠達到以下有益效果:
28、本發明中,在對患側肢體進行功能性刺激時,在迭代初始階段,采用響應速度更快的2型模糊pid控制器,使得通過候選控制參數對患側肢體進行功能性電刺激能夠使得患側肢體的實際運動軌跡快速逼近目標運動軌跡,顯著降低了迭代學習歷史控制經驗,然后在后續迭代過程中,使用2型模糊迭代學習控制器通過前一次迭代時的候選控制參數和當前次迭代時歷史節點的誤差更新當前次迭代時當前節點的候選控制參數,相當于通過學習歷史控制經驗,逐步提高患側肢體的運動軌跡對目標運動軌跡的跟蹤精度。
技術特征:
1.一種功能性電刺激的閉環反饋控制方法,其特征在于,包括:
2.根據權利要求1所述的方法,其特征在于,根據當前節點的誤差,更新2型模糊迭代學習控制器的學習率增益,包括:
3.根據權利要求2所述的方法,其特征在于,對誤差變化率和誤差進行2型模糊推理,得到當前節點的學習率增益,包括:
4.根據權利要求1所述的方法,其特征在于,2型模糊迭代學習控制器的控制公式為:
5.根據權利要求1所述的方法,其特征在于,患側肢體的實際姿態和期望姿態的獲取過程,包括:
6.一種功能性電刺激的閉環反饋控制裝置,其特征在于,包括:
7.一種計算機可讀存儲介質,其特征在于,所述存儲介質存儲有計算機程序,所述計算機程序被stm32或其他微控制器的處理器執行時實現如權利要求1~5任一項所述的方法。
8.一種計算機設備,其特征在于,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,所述處理器為stm32或其他微控制器的處理器,所述處理器執行所述程序時實現如權利要求1~5任一所述的方法。
技術總結
本發明公開了一種功能性電刺激的閉環反饋控制方法,涉及生物醫學工程技術領域。根據患側肢體的實際姿態和期望姿態,確定實際姿態到期望姿態的目標運動軌跡,并將目標運動軌跡劃分為多個節點;對多個節點進行迭代尋優,在第一次迭代時,通過2型模糊PID控制器分別對多個節點的初始控制參數進行多次計算,得到多個節點的候選控制參數;從第二次迭代開始,將前一次迭代時的候選控制參數和當前次迭代時歷史節點的誤差代入2型模糊迭代學習控制器中,得到當前次迭代時當前節點的候選控制參數,直至迭代完成;候選控制參數用于對患側肢體進行功能性電刺激。該方法能夠提高對患側肢體功能性電刺激的控制精度。
技術研發人員:鮑學亮,田寧,劉士勤
受保護的技術使用者:寧夏大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!