一種面向臨床應用的智能激光口腔種植機器人
本發明屬于醫療機器人設備,具體為一種面向臨床應用的智能激光口腔種植機器人。
背景技術:
1、在口腔種植手術過程中,傳統方法往往依賴于醫生的經驗和手動操作,對手術精度的要求較高,由于手術過程中涉及到復雜的解剖和精細的操作,難以保證種植體的精準定位和牙槽骨的準確鉆孔,這不僅增加了手術的復雜性,還可能導致種植失敗。現有的智能種植技術,通常缺乏實時的圖像反饋和動態導航,導致醫生難以控制工序進程和調整種植方案。手術中常用的機械鉆頭,在復雜的口腔環境中,如何實現手術的精準定位和安全仍然是一大挑戰。因此設計開發一款能夠集成影像采集、三維重建、實時動態導航和激光切割的智能種植機器人,具有重要的臨床應用價值。
2、現有的口腔種植技術主要依賴于機械方式備洞。這種方法成熟,但存在一定的局限性:機械備洞接觸式切割容易引起骨組織的損傷,影響早期治療效果。另外,傳統手術缺乏實時圖像反饋,醫生無法在手術過程中動態調整操作,導致手術精度較低,完全依賴醫生的操作經驗。激光技術近年來被引入到牙科領域,其無接觸、精確消融的特點,使得在牙槽骨備洞中表現出具大的潛力。然而,目前的激光切割設備多為獨立使用,難以與口腔種植手術的其他步驟進行有效整合。
技術實現思路
1、為解決上述問題,本發明提出了一種智能激光口腔種植機器人,其機器人系統集成了cbct圖像獲取、基于深度學習的圖像分割、三維重建、動態導航與激光切割技術。通過光學追蹤定位系統實時監測手術區域,結合智能路徑規劃和激光控制,實現對牙槽骨的精準切割和種植體的精確植入。本發明采用激光備洞,無需跟換鉆頭,減少交叉感染,實現精確備洞。該方法操作簡便、安全性高、精確性強,為口腔種植手術提供了一種智能化、標準化的解決方案,該方案極大地提高了手術的成功率和患者的恢復效果。
2、為解決上述技術問題,本發明采用的一個技術方案是:
3、一種面向臨床應用的智能激光口腔種植機器人,包括機器人系統、ct成像系統、光學定位追蹤系統、支撐裝置和控制平臺;
4、所述機器人系統包含基座、固定設置于基座頂面一側的固定架、連接于固定架上的機械臂和安裝于機械臂執行末端的激光發射器,所述激光發射器用于在骨組織上進行鉆孔;
5、所述ct成像系統包含射線源和探測器,射線源與探測器相對設置,射線源發射掃描射線,探測器接收掃描射線,對位于二者之間的物體進行射線掃描,用于術前患者口腔信息的掃描采集;
6、所述光學定位追蹤系統包括紅外線發射器、紅外線立體攝像機和動態參考架,紅外線發射器固定設置于患者口腔內部或外部,動態參考架固定設置在紅外線發射器上并位于患者口腔外部,紅外線立體攝像機固定設置在固定架上,紅外線發射器發出特定波長的紅外光,紅外線立體攝像機捕捉該紅外光,用于術中患者口腔信息的動態掃描采集;
7、控制平臺中設置控制系統,接收ct成像系統和光學定位追蹤系統采集的數據信息,規劃和適時調整機器人系統的工作狀態。
8、進一步的,所述機器人系統還包括固定設置于固定架上的操控面板,用于手動輸入控制機械手運行的指令。
9、進一步的,所述激光發射器上分別設置有指示激光發射器和激光感應器,指示激光發射器發射指示激光,激光感應器接收該指示激光,用于將激光發射器精確地定位到鉆孔起始點上方。
10、進一步的,所述激光發射器上還配置有清洗噴頭,清洗噴頭通過管路與外部的清潔液供給裝置連接,用于對鉆孔進行清理。
11、進一步的,所述激光發生器采用1-3μm任意波長的牙科激光器。
12、進一步的,所述ct成像系統還包括軌道、滑動安裝于軌道上的行進驅動裝置和滑動連接于行進驅動裝置頂部的旋轉支架,所述射線源和探測器分別相對地固定安裝于旋轉支架的兩側內壁上,行進驅動裝置與軌道之間通過齒輪齒條傳動機構連接,旋轉支架與行進驅動裝置之間通過齒輪副傳動機構連接。
13、進一步的,所述ct成像系統采用錐形束ct。
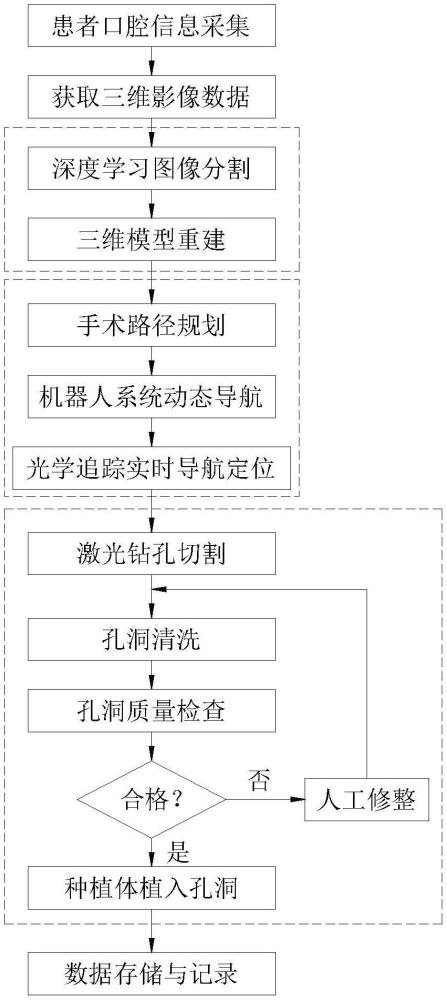
14、還提供了一種面向臨床應用的智能激光口腔種植機器人的控制方法,包括以下步驟:
15、將放射標記點配準裝置放置于患者口中,使用ct成像系統,對患者進行掃描,獲取高分辨率的三維影像圖像;
16、在控制平臺中構建u-net模型,使用teeth3ds+數據集訓練并測試模型,對從ct成像系統獲取的原始圖像數據進行預處理操作,提高圖像質量并減少偽影,使用訓練好的u-net模型對新的醫學圖像進行分割,并生成輪廓和遮罩二維圖形;
17、讀取二維序列醫學圖像分割結果并進行三維重建:設置渲染窗口和交互模式來初始化建模環境,讀取二維圖像文件并定義圖片參數,應用高斯平滑技術對圖像進行處理,獲得更平滑的重建結果,計算圖像輪廓,并將口腔三維模型可視化展示出來;
18、在三維重建獲得的全景圖像上進行下顎神經管的精確分割,根據分割結果,結合患者的解剖結構和修復需求,規劃虛擬種植體的位置和角度并進行模擬仿真,利用三維模型中的牙槽骨信息,自動測量種植位點的牙槽骨磨骨量,根據測量結果調整種植體的深度和直徑,規劃機器人系統的手術路徑;
19、機器人系統按照規劃的手術路徑運行,光學定位追蹤系實時獲取患者口腔的影像學數據,反饋至控制系統,對機器臂進行動態導航,醫生手動輸入操作指令控制機械臂的運動,控制系統根據接收到的操作指令和光學定位追蹤系統實時反饋信息對機器臂的運動軌跡進行靈活調整;
20、啟動機械臂的自動入口程序,機械臂根據存儲的術前規劃路徑自動進入患者口腔內,并將激光發射器定位到鉆孔起始點上方,控制系統激活激光發射器,產生高能激光束對骨組織進行切割,當達到預定深度后,激光發射停止,對孔洞進行清理,去除可能殘留的碎屑。
21、進一步的,在控制平臺中設置有相應的控件,使醫生能夠在二維圖像交互窗口中查看和調整術前路徑規劃所得的各項參數,并完成設備狀態同步過程服務。
22、進一步的,對骨組織進行切割的過程中,機器人系統實時監測激光的鉆速、受力程度以及骨組織的密度變化,并根據需要調整激光的能量輸出。
23、與現有技術相比較,本發明的有益效果如下:
24、本發明提出的一種面向臨床應用的智能激光口腔種植機器人,其機器人系統結合了先進的圖像重建、智能路徑規劃、動態導航和激光切割技術,通過錐束ct(cbct)獲取患者口腔的高位分辨率圖像,利用深度學習模型進行圖像分割和三維重建,采用光學追蹤定位技術實時監測作業區域,結合動態導航確保激光切割路徑的精準性。通過設置坐標激光器,能夠在保證機械臂運行安全性的同時,實現對牙槽骨的精確切割和精度控制。整個手術過程由智能控制系統進行實時監控和調整,確保種植體的精準入口。本發明極大地提高了口腔種植手術的精準度、效率和安全性,為臨床口腔種植提供了自動化解決方案。
技術特征:
1.一種面向臨床應用的智能激光口腔種植機器人,其特征在于:包括機器人系統、ct成像系統、光學定位追蹤系統、支撐裝置和控制平臺;
2.根據權利要求1所述的面向臨床應用的智能激光口腔種植機器人,其特征在于:所述機器人系統還包括固定設置于固定架上的操控面板,用于手動輸入控制機械手運行的指令。
3.根據權利要求1所述的面向臨床應用的智能激光口腔種植機器人,其特征在于:所述激光發射器上分別設置有指示激光發射器和激光感應器,指示激光發射器發射指示激光,激光感應器接收該指示激光,用于將激光發射器精確地定位到鉆孔起始點上方。
4.根據權利要求1所述的面向臨床應用的智能激光口腔種植機器人,其特征在于:所述激光發射器上還配置有清洗噴頭,清洗噴頭通過管路與外部的清潔液供給裝置連接,用于對鉆孔進行清理。
5.根據權利要求1或3或4所述的面向臨床應用的智能激光口腔種植機器人,其特征在于:所述激光發生器采用1-3μm任意波長的牙科激光器。
6.根據權利要求1所述的面向臨床應用的智能激光口腔種植機器人,其特征在于:所述ct成像系統還包括軌道、滑動安裝于軌道上的行進驅動裝置和滑動連接于行進驅動裝置頂部的旋轉支架,所述射線源和探測器分別相對地固定安裝于旋轉支架的兩側內壁上,行進驅動裝置與軌道之間通過齒輪齒條傳動機構連接,旋轉支架與行進驅動裝置之間通過齒輪副傳動機構連接。
7.根據權利要求1或6所述的面向臨床應用的智能激光口腔種植機器人,其特征在于:所述ct成像系統采用錐形束ct。
8.一種面向臨床應用的智能激光口腔種植機器人的控制方法,其特征在于,包括以下步驟:
9.根據權利要求8所述的面向臨床應用的智能激光口腔種植機器人,其特征在于:在控制平臺中設置有相應的控件,使醫生能夠在二維圖像交互窗口中查看和調整術前路徑規劃所得的各項參數,并完成設備狀態同步過程服務。
10.根據權利要求8所述的面向臨床應用的智能激光口腔種植機器人,其特征在于:對骨組織進行切割的過程中,機器人系統實時監測激光的鉆速、受力程度以及骨組織的密度變化,并根據需要調整激光的能量輸出。
技術總結
本發明公開了一種面向臨床應用的智能激光口腔種植機器人,包括機器人系統、CT成像系統、光學定位追蹤系統、支撐裝置和控制平臺;機器人系統包含基座、固定架、機械臂和激光發射器,激光發射器用于在骨組織上進行鉆孔;CT成像系統包含射線源和探測器,用于術前患者口腔信息的掃描采集;光學定位追蹤系統包括紅外線發射器、紅外線立體攝像機和動態參考架,用于術中患者口腔信息的動態掃描采集;控制平臺接收CT成像系統和光學定位追蹤系統采集的數據信息,規劃和適時調整機器人系統的工作狀態。本發明結合了先進的圖像重建、智能路徑規劃、動態導航和激光切割技術,可確保激光切割路徑的精準性,實現對牙槽骨的精確切割和精度控制。
技術研發人員:熊正東,張冠宇,屠姍姍,徐基亮,楊振麗,鄔家成,張文俊,徐偉
受保護的技術使用者:安徽中醫藥大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!