一種用于安裝玻璃幕墻的移動機器人
本申請涉及機器人,更具體地說,是涉及一種用于安裝玻璃幕墻的移動機器人。
背景技術:
1、現在建筑行業市場前景大,特別是玻璃幕墻,其作為一種美觀新穎的建筑墻體裝飾方法,是現有主義高層建筑時代的顯著特征。其中,目前玻璃幕墻的尺寸一般在600mm*600mm-900mm*1200mm,重量一般不小于35kg,很顯然的是,由于玻璃幕墻的體積大、質量重,僅僅通過人工安裝顯然過于困難,且存在較大的安全隱患。
2、為了解決上述問題,目前玻璃幕墻多采用升降機裝置配合人工進行安裝工作,升降機裝置通過是安裝在專用的移動車上,其不僅重量大,且體型過于龐大,僅能適用于室外的玻璃幕墻的安裝工作,而對有空間約束性的室內的玻璃幕墻,其只能通過簡單的升吊工具配合人工進行安裝工作,而相對于室外的升降機裝置和移動車,室內的升吊工具靈活性差,人工需要配合的工作量大且復雜,導致室內的玻璃幕墻難以安裝、人力耗費資源多且安裝效率低的問題。
3、因此,現有技術還有待于改進。
技術實現思路
1、本申請的目的在于提供一種用于安裝玻璃幕墻的移動機器人,以解決現有通過室內的升吊工具配合人工安裝有空間約束性的室內的玻璃幕墻時,室內的升吊工具靈活性差,從而導致室內的玻璃幕墻難以安裝、人力耗費資源多且安裝效率低的問題。
2、為實現上述目的,本申請實施例采用的技術方案是:
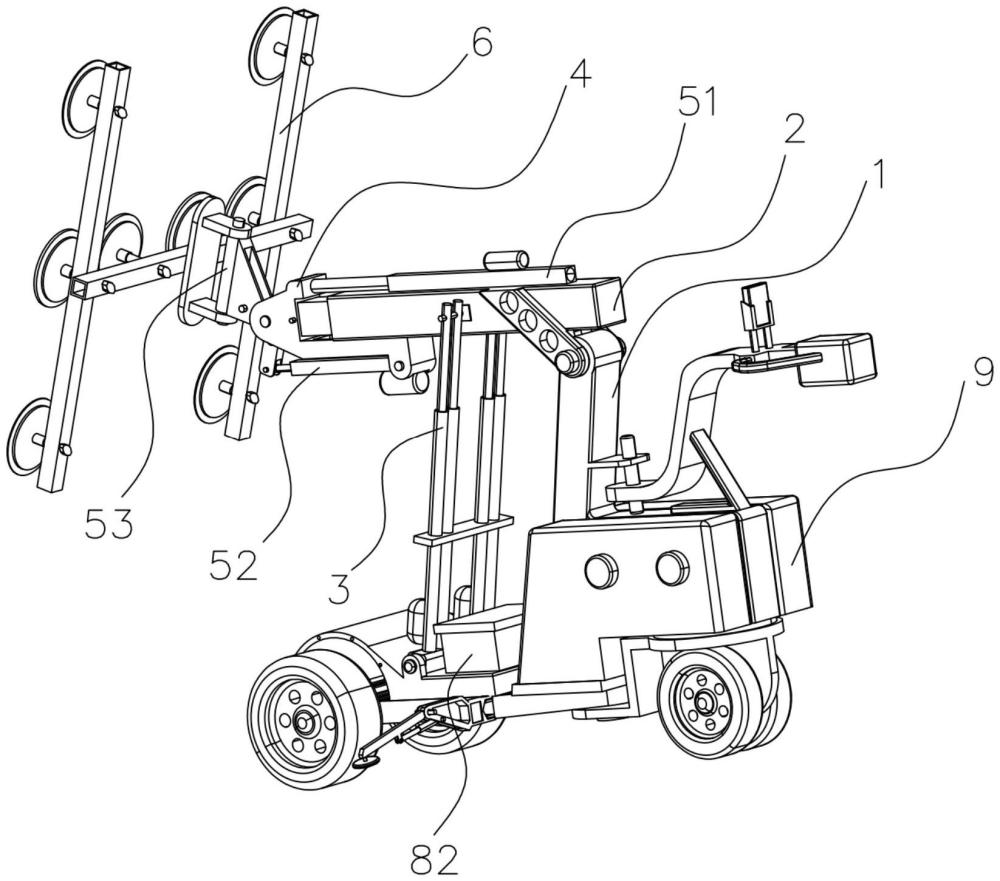
3、一種用于安裝玻璃幕墻的移動機器人,包括:
4、移動機器人本體;
5、中間銜接組件,其設置于所述移動機器人本體的上方,所述中間銜接組件的一端與所述移動機器人本體鉸接;
6、上下升降組件,其鉸接設置于所述移動機器人本體上,所述上下升降組件的驅動端與所述中間銜接組件連接;
7、鉸接座,其與所述中間銜接組件鉸接;
8、前后移動件,其設置于所述中間銜接組件上,所述前后移動件的驅動端與所述鉸接座連接;
9、傾斜擺動件,其固定端鉸接設置于所述鉸接座的一端上,所述傾斜擺動件的驅動端與所述鉸接座的另一端鉸接;
10、左右擺動件,其固定端鉸接設置于所述鉸接座的一端上,并與所述傾斜擺動件的驅動端共享同一個鉸接軸;
11、吸盤組件,其設置于所述左右擺動件的驅動端上,所述吸盤組件用于吸住玻璃幕墻,所述吸盤組件上的玻璃幕墻通過所述左右擺動件的驅動而擺動至使其平行于所述中間銜接組件。
12、根據以上所述的用于安裝玻璃幕墻的移動機器人,所述移動機器人本體上設置有斷桿,所述中間銜接組件包括:
13、上肢推桿,其與所述鉸接座鉸接;
14、上肢套桿,其設置于所述移動機器人本體的上方,并滑動套設于所述上肢推桿背離所述鉸接座的一端上;
15、第一連接件和第二連接件,其分別設置于所述上肢套桿的兩側上,并分別與所述斷桿貫穿出所述移動機器人本體的兩端轉動連接。
16、根據以上所述的用于安裝玻璃幕墻的移動機器人,所述上下升降組件包括:
17、底桿,其兩端分別轉動設置于所述移動機器人本體的兩側上;
18、第一升降驅動件和第二升降驅動件,其固定端均設置于所述移動機器人本體上,所述第一升降驅動件的驅動端與所述第二升降驅動件的驅動端分別對稱設置于所述上肢套桿的兩側上。
19、根據以上所述的用于安裝玻璃幕墻的移動機器人,所述鉸接座上設置有鉸接軸,所述移動機器人還包括:
20、導向座,其上開設有與所述鉸接軸相匹配的導向槽,所述導向槽設置于所述導向座的中部,所述鉸接軸滑動設置于所述導向槽內,所述導向槽用于對所述上下升降組件的運動與所述前后移動件的運動導向,所述導向座的一側與所述傾斜擺動件的驅動端鉸接、另一側與所述左右擺動件鉸接。
21、根據以上所述的用于安裝玻璃幕墻的移動機器人,所述吸盤組件包括:
22、吸盤支架,其設置于所述左右擺動件的驅動端上;
23、多個吸盤,其設置于所述吸盤支架上。
24、根據以上所述的用于安裝玻璃幕墻的移動機器人,所述移動機器人還包括:
25、控制模塊,其設置于所述移動機器人本體上,所述控制模塊的輸出端與所述上下升降組件的輸入端、所述前后移動件的輸入端、所述傾斜擺動件的輸入端和所述左右擺動件的輸入端連接;
26、電源模塊,其設置于所述移動機器人本體上,所述電源模塊的輸出端與所述控制模塊的輸入端連接。
27、根據以上所述的用于安裝玻璃幕墻的移動機器人,所述移動機器人還包括配重組件,所述配重組件設置于所述移動機器人本體上。
28、根據以上所述的用于安裝玻璃幕墻的移動機器人,所述移動機器人還包括兩個防側翻組件,兩個所述防側翻組件對稱設置于所述移動機器人本體的兩側上。
29、根據以上所述的用于安裝玻璃幕墻的移動機器人,所述防側翻組件包括:
30、固定支腳,設置于所述移動機器人本體上;
31、活動支腳,其與所述固定支腳背離所述移動機器人本體的一端鉸接;
32、伸縮件,其固定端與所述固定支腳鉸接,所述伸縮件的驅動端與所述活動支腳背離所述固定支腳的一端鉸接。
33、根據以上所述的用于安裝玻璃幕墻的移動機器人,所述活動支腳背離所述固定支腳的一端還設置有接觸盤。
34、本申請提供的一種用于安裝玻璃幕墻的移動機器人的有益效果至少在于:
35、可以預見的是,由于玻璃幕墻的體積太大,比大部分的室內的門的尺寸都大,若將吸住玻璃幕墻的移動機器人上的玻璃幕墻正面正對著門,很顯然,吸住玻璃幕墻的移動機器人是無法通過門進入室內的,本申請通過設置左右擺動件,并通過驅動左右擺動件而帶動吸盤組件上的玻璃幕墻擺動至使玻璃幕墻平行于中間銜接組件和移動機器人本體,也就是將吸盤組件上的玻璃幕墻的正面擺動至其側面,以方便移動機器人帶著其上的玻璃幕墻通過門而進入室內,并且,本申請還設置了上下升降組件、前后移動件和傾斜擺動件,通過上下升降組件、前后移動件和傾斜擺動件分別與鉸接座的配合結構,能夠帶動吸盤組件上的玻璃幕墻實現上下升降、前后移動和傾斜擺動的運動,靈活性高,從而可以減小人力耗費的資源和安裝難度,提高室內的玻璃幕墻的安裝效率。
技術特征:
1.一種用于安裝玻璃幕墻的移動機器人,其特征在于,包括:
2.如權利要求1所述的用于安裝玻璃幕墻的移動機器人,其特征在于,所述移動機器人本體上設置有斷桿,所述中間銜接組件包括:
3.如權利要求2所述的用于安裝玻璃幕墻的移動機器人,其特征在于,所述上下升降組件包括:
4.如權利要求1所述的用于安裝玻璃幕墻的移動機器人,其特征在于,所述鉸接座上設置有鉸接軸,所述移動機器人還包括:
5.如權利要求1所述的用于安裝玻璃幕墻的移動機器人,其特征在于,所述吸盤組件包括:
6.如權利要求1所述的用于安裝玻璃幕墻的移動機器人,其特征在于,所述移動機器人還包括:
7.如權利要求1所述的用于安裝玻璃幕墻的移動機器人,其特征在于,所述移動機器人還包括配重組件,所述配重組件設置于所述移動機器人本體上。
8.如權利要求1所述的用于安裝玻璃幕墻的移動機器人,其特征在于,所述移動機器人還包括兩個防側翻組件,兩個所述防側翻組件對稱設置于所述移動機器人本體的兩側上。
9.如權利要求8所述的用于安裝玻璃幕墻的移動機器人,其特征在于,所述防側翻組件包括:
10.如權利要求9所述的用于安裝玻璃幕墻的移動機器人,其特征在于,所述活動支腳背離所述固定支腳的一端還設置有接觸盤。
技術總結
本申請涉及機器人技術領域,提供一種用于安裝玻璃幕墻的移動機器人,以解決現有通過室內的升吊工具配合人工安裝有空間約束性的室內的玻璃幕墻時,室內的升吊工具靈活性差,從而導致室內的玻璃幕墻難以安裝、人力耗費資源多且安裝效率低的問題,包括移動機器人本體;中間銜接組件,其設置于所述移動機器人本體的上方,所述中間銜接組件的一端與所述移動機器人本體鉸接;上下升降組件,其鉸接設置于所述移動機器人本體上,所述上下升降組件的驅動端與所述中間銜接組件連接;鉸接座,其與所述中間銜接組件鉸接;前后移動件,其設置于所述中間銜接組件上,所述前后移動件的驅動端與所述鉸接座連接;傾斜擺動件,其固定端鉸接設置于鉸接座的一端上。
技術研發人員:馮偉,劉笑,陳清朋,王衛軍,黃天侖,汪智勇,張樹瀟
受保護的技術使用者:中國科學院深圳先進技術研究院
技術研發日:20240711
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!