一種基于激光檢測及圖像采集技術的自調節登船橋的制作方法
本技術涉及港機設備及港口自動化,尤其涉及一種基于激光檢測及圖像采集技術的自調節登船橋。
背景技術:
1、目前,憑借在實現人車分流、高運行效率和安全性方面的巨大技術優勢,旅客登船橋技術已經開始在郵輪碼頭、客滾碼頭等人員通行場所推廣應用。作為新興技術,旅客登船橋接船過程操作仍采用人工現場操控輔助傾角、位置傳感器以及限位開關等常規方法實現,人工現場操控登船橋接船應用中存在以下弊端:
2、人員對船舶停靠狀態進行判斷,再根據判斷結果進行相關操作,接船效率及工作安全性受碼頭人員主觀因素影響大。
3、登船橋靠泊過程中,需要船上、地面、登船橋操控室三方人員借助傳統通信方式進行信息交互才能實現登船橋接船,旅客使用登船橋上下船感官體驗差。
4、中國專利文獻(申請號:201620049913.7)公開了一種登船橋接船用渡板裝置及登船橋,通過設置轉動平臺及兩個驅動機構驅動渡板在三維方向上的隨動,便于登船橋根據接船需要調整渡板的伸出長度、擺動角度,實現登船橋接船渡板控制而進行接船,其技術方案僅公開了渡板接船后自動控制方法,無法實現從船舶進港開始即實現登船橋及其渡板全自動自調節。
5、隨著登船橋技術普及,登船橋工作安全性、高效性、舒適性、智能化要求日益提高,有必要開發全自動化智能登船橋,上述功能實現的有效方式之一是開發一種基于激光檢測及圖像采集技術的自調節登船橋。
技術實現思路
1、本實用新型要解決的技術問題是,提供一種基于激光檢測及圖像采集技術的自調節登船橋。
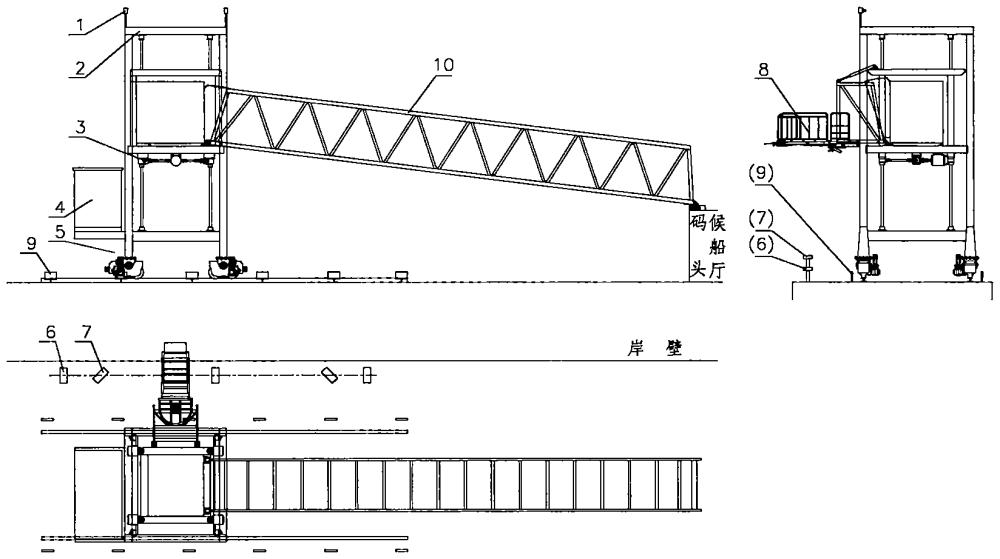
2、為了解決上述技術問題,本實用新型采用的技術方案是:基于激光檢測及圖像采集技術的自調節登船橋,主要由圖片采集系統1、門架結構2、升降機構3、控制系統4、大車行走機構5、測距系統6、測速系統7,接船通道8、行走定位板9、下船廊道10組成,其中,測速系統7及測距系統6安裝在碼頭前沿,圖片采集系統1安裝在門架頂部,控制系統4、升降機構3、接船通道8安裝在門架結構2上,門架結構2安裝在大車行走機構5上,大車行走機構5可沿著碼頭面行走,行走定位板9固定在碼頭面,下船廊道10連接碼頭候船廳與接船通道8。
3、采用上述技術方案,通過測速系統7測量靠泊船舶進港速度,并判別船舶在港池內是否已經停穩,通過測距系統6判別船舶距離岸邊距離,并判斷船舶停靠距離是否在登船橋接船范圍內,圖片采集系統1對船舶接船口局部進行成像,控制系統4控制大車行走機構5、升降機構3做行走、升降動作將接船通道8運送至接船口位置或指定位置,接船通道8做相應伸縮及俯仰動作與船舶接船口搭接以實現登船橋全自動接船。
4、進一步的,所述激光測速系統7包括2套激光多普勒測速儀成一定夾角布設在岸邊,利用差分激光多普勒原理,計算出船舶順岸以及垂岸運行速度,當船舶靠岸順岸速度及垂岸速度均小于設定閾值其保持足夠長時間時,即認為船舶已經停穩。
5、進一步的,所述激光測距系統6包括3對激光掃描發射器和激光掃描接收器按照間隔15-20m布設在岸邊,通過控制所述激光發射器發射出不同波段的激光,經過反射后由激光接收器接收物體上反射回來的激光,判斷船舶停靠岸邊的姿態及參數,在船舶與岸邊距離小于設定閾值時,向圖片采集系統1發射脈沖信號,開啟圖片采集系統。
6、進一步的,所述的圖片采集系統1包括2臺高清工業相機,利用采集照片顏色判斷船舶登船口位置,并將判斷信息上傳至控制系統4,圖片采集系統1應用2臺高清工業相相機拍攝船舶接船口相同位置兩組不同角度圖片,獲取接船口三維立體信息。
7、進一步的,所述大車行走機構5、升降機構3均安裝絕對值編碼器,通過編碼器轉數換算,測量大車行走距離以及登船橋接船通道8升降高度,考慮到大車行走存在打滑可能,大車行走機構5外側安裝對射傳感器,通過行走定位板9與大車行走機構5對射傳感器信息交互,實時檢測和校驗登船橋行走位置。
技術特征:
1.一種基于激光檢測及圖像采集技術的自調節登船橋,其特征在于由圖片采集系統(1)、門架結構(2)、升降機構(3)、控制系統(4)、大車行走機構(5)、測距系統(6)、測速系統(7),接船通道(8)、行走定位板(9)、下船廊道(10)組成,所述測速系統(7)、測距系統(6)安裝在碼頭前沿,所述圖片采集系統(1)、升降機構(3)、接船通道(8)、控制系統(4)安裝在門架結構(2)上,所述門架結構(2)安裝在大車行走機構(5)上,所述大車行走機構(5)可沿著碼頭面行走,所述行走定位板(9)固定在碼頭面,所述下船廊道(10)連接碼頭候船廳與接船通道(8),所述測速系統(7)、測距系統(6)判別船舶停靠碼頭狀態,所述測距系統(6)將距離判斷結果同步脈沖至圖片采集系統(1),所述圖片采集系統(1)對船舶局部成像判別船舶接船口信息,并將結果發送給控制系統(4),所述控制系統(4)控制大車行走機構(5)、升降機構(3)將接船通道(8)運送。
2.根據權利要求1所述的一種基于激光檢測及圖像采集技術的自調節登船橋,其特征是所述測速系統(7)和所述測距系統(6)用以測量判斷船舶停靠碼頭狀態,所述測距系統(6)包括3對激光掃描發射器和激光掃描接收器按照間隔15-20m布設在岸邊,所述激光測速系統(7)包括2套激光多普勒測速儀成一定夾角布設在岸邊。
3.根據權利要求1所述的一種基于激光檢測及圖像采集技術的自調節登船橋,其特征是所述圖片采集系統(1)包括2臺高清工業相機。
4.根據權利要求1所述的一種基于激光檢測及圖像采集技術的自調節登船橋,其特征是所述大車行走機構(5)和所述升降機構(3)均安裝絕對值編碼器,通過編碼器轉數換算,測量大車行走距離以及所述接船通道(8)升降高度,所述大車行走機構(5)外側安裝對射傳感器,通過所述行走定位板(9)與所述大車行走機構(5)對射傳感器信息交互,實時檢測和校驗登船橋行走位置。
技術總結
本技術提供一種基于激光檢測及圖像采集技術的自調節登船橋,具體涉及圖片采集系統、門架結構、升降機構、控制系統、大車行走機構、測距系統、測速系統,接船通道、行走定位板、下船廊道等。采用本技術能夠實現接船登船橋對被接船舶是否完成靠泊操作以及被接船舶靠泊姿態是否具備接船條件進行自動判斷,同時能夠實現登船橋接船位置及接船高度的自動調節,在接船過程中實現自動與被接船舶接船口對正并可靠搭接。本技術特別適用于對郵輪碼頭及客滾碼頭裝備有自動化、智能化需求的場合,可以大幅減少船岸人員協同操作工作量和操作難度,提升登船橋裝備的自動化水平和科技含量。
技術研發人員:李靜,陳慶為,孫建銳,丁敏
受保護的技術使用者:交通運輸部水運科學研究所
技術研發日:20240425
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!