煤礦井下巡檢機器人工作平臺及其控制系統的制作方法
本發明涉及煤礦井下巡檢,具體為煤礦井下巡檢機器人工作平臺及其控制系統。
背景技術:
1、煤礦井下作業環境復雜且充滿危險,因此高效、安全的巡檢是保障礦井安全生產的關鍵。然而,傳統的巡檢方式多依賴人工,存在安全隱患和效率低下的問題。隨著自動化技術的發展,煤礦井下巡檢機器人逐漸成為巡檢工作中的重要工具。這類機器人能夠自主在煤礦井下進行巡檢,實時采集環境數據,及時發現潛在的安全問題。
2、現有的煤礦井下巡檢機器人通常依靠固定安裝的攝像頭和基本的傳感器系統,能夠實現煤礦井下的一些基礎巡檢任務,這些機器人通過氣體檢測儀、超聲波傳感器、激光測距儀等設備采集環境數據,并根據傳感器反饋進行路徑規劃和障礙物避讓;從而在煤礦井下的巡檢任務中起到了基本的作用,能夠完成部分環境監測和簡單的巡檢任務;
3、現有技術中的巡檢機器人還存在一些不足;首先,固定視角的攝像頭設計無法適應煤礦井下復雜的空間結構,無法靈活調整視角,容易錯過關鍵巡檢區域;而且,現有的清障設計通常較為被動,遇到障礙物時,機器人往往停滯等待人工干預或無法有效清除障礙,導致巡檢任務的中斷和效率下降;此外,單一的傳感器系統無法全面獲取環境信息,容易造成數據誤差或信息遺漏。
技術實現思路
1、針對現有技術的不足,本發明提供了煤礦井下巡檢機器人工作平臺及其控制系統,解決了現有技術中固定視角攝像頭、被動清障設計和單一傳感器系統導致的巡檢效率低、精度不足和障礙物清理不及時的問題。
2、為實現以上目的,本發明通過以下技術方案予以實現:煤礦井下巡檢機器人工作平臺及其控制系統,包括:
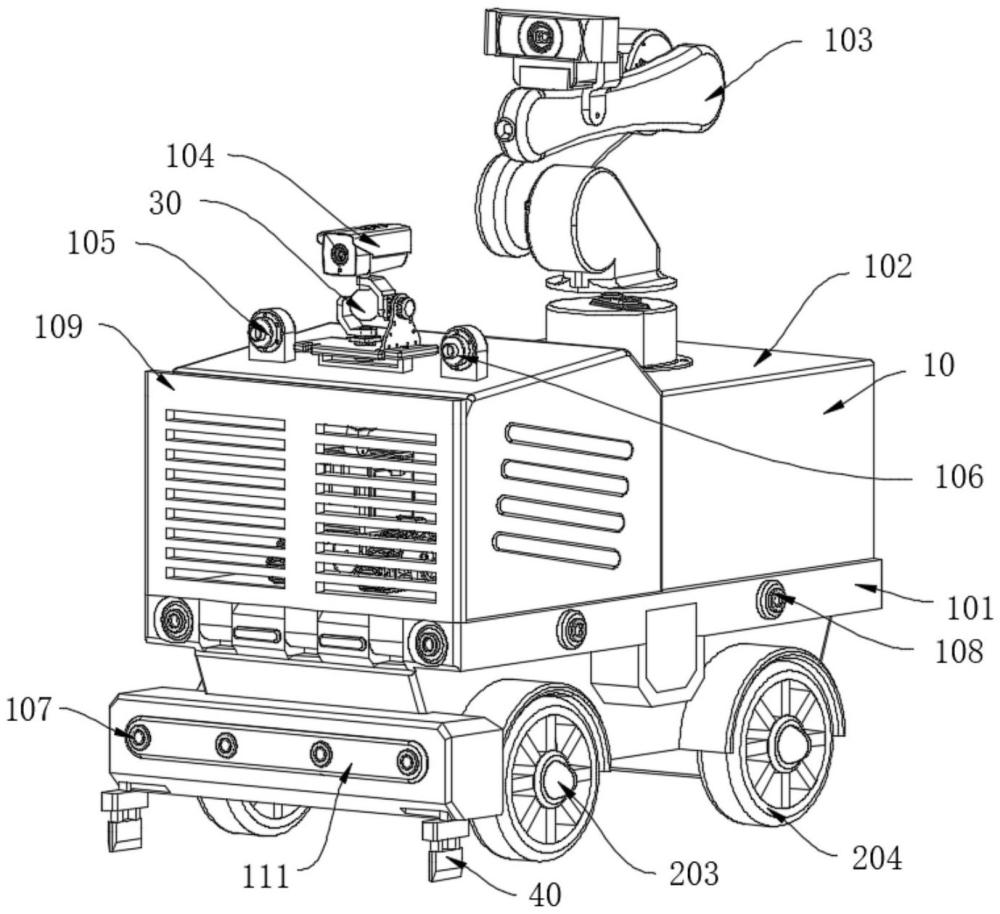
3、巡檢機構、驅動機構和前端觀察攝像頭,所述驅動機構設置在所述巡檢機構的中部,用于驅動巡檢機構在煤礦井中巡檢,所述前端觀察攝像頭設置在所述巡檢機構的頂部,所述前端觀察攝像頭的外側固定連接有照明件,所述照明件用于為裝置提供照明條件,所述前端觀察攝像頭用于提供巡檢視角,所述巡檢機構包括頂部安裝的高水平面檢測機器人以及內部存放的低水平面巡檢機器人,使巡檢機構能夠在不同高度大小的煤礦井中巡檢;
4、調節機構,其設置在所述巡檢機構的上側,用于調節前端觀察攝像頭的朝向,使前端觀察攝像頭獲取煤礦井內部指定位置的視角;
5、兩組清障機構,其設置在所述巡檢機構的外側,用于在行駛過程中同步將行駛區前方的煤礦清理,使裝置平穩前行,保證巡檢視角的平穩。
6、優選的,所述巡檢機構包括移動座,所述移動座的上側固定連接有收納倉,所述高水平面檢測機器人安裝在所述收納倉的頂部,所述收納倉的上側從左到右依次安裝有氣體檢測儀和路徑定位傳感器,所述移動座的外側固定連接有多組超聲波傳感器,所述移動座的前側安裝有支撐板,所述支撐板遠離所述移動座的一側固定連接有激光測距儀,所述收納倉的前側轉動連接有翻板。
7、優選的,所述驅動機構包括兩組安裝塊,所述安裝塊固定連接在所述移動座的底部,所述安裝塊的中部轉動連接有兩個連接軸,所述連接軸的外周固定連接有車輪,其中一組所述安裝塊的中部固定連接有雙頭電機,兩個所述連接軸分別固定連接在所述雙頭電機的兩個輸出端。
8、優選的,所述調節機構包括連接板,所述連接板固定連接在所述收納倉的頂部,所述連接板的中部固定連接有電機一,所述電機一的輸出端固定連接有弧形板一,所述弧形板一的內側通過轉桿轉動連接有滾球,所述滾球的外側固定連接有連接桿,所述前端觀察攝像頭安裝在所述連接桿遠離所述滾球的一端,所述連接板的頂部固定連接有支撐板,所述支撐板的中部固定連接有電機二,所述電機二的輸出端固定連接有弧形板二,所述連接桿轉動連接在所述弧形板二的中部。
9、優選的,所述清障機構包括固定板,所述固定板固定連接在安裝塊的中部,所述固定板的另一側固定連接有套殼,所述套殼安裝在所述移動座的前側,所述連接軸的外周固定連接有鏈輪一,所述套殼的中部轉動連接有兩組鏈輪二,所述鏈輪一和所述鏈輪二的外周套設有鏈條,兩組所述鏈輪二相對的一側均固定連接有錐齒輪一,所述安裝塊的內部轉動連接有兩組錐齒輪二,所述錐齒輪一和所述錐齒輪二相互嚙合,所述錐齒輪二的外側固定連接有轉盤,所述轉盤的另一側固定連接有偏心桿,所述偏心桿的外周套設有連桿帶,所述連桿帶的底部固定連接有滑塊,所述滑塊滑動連接在所述套殼的中部,所述滑塊的底部固定連接有殼體,所述殼體的內部固定連接有復位彈簧,所述復位彈簧的另一端固定連接有限位板,所述限位板的另一側固定連接有撥板。
10、優選的,所述套殼的底部開設有滑槽,所述滑塊滑動連接在所述滑槽的中部。
11、本發明還提供煤礦井下巡檢機器人工作平臺的控制系統,包括:
12、任務規劃模塊,用于根據巡檢目標生成巡檢任務,并分配給機器人執行;
13、傳感器數據處理模塊,用于接收并處理來自機器人上的攝像頭數據、氣體濃度數據、路徑定位信息、與物體間距信息,并為控制系統提供實時反饋;
14、最優路徑規劃模塊,用于根據巡檢任務和反饋數據,計算并規劃機器人行進的最優路徑,確保巡檢任務的高效執行;
15、控制模塊,用于根據需求調節拍攝畫面的角度,得到煤礦不同角度位置的畫面;
16、控制反饋模塊,用于實時收集機器人執行過程中的反饋數據,并根據任務執行的實際情況對路徑規劃和控制指令進行優化調整。
17、優選的,所述任務規劃模塊包括:
18、任務接收單元,用于接收巡檢目標信息,生成任務列表;
19、任務調度單元,用于根據任務優先級、巡檢區域和機器人的當前狀態,自動分配任務給機器人;
20、任務優先級調整單元,用于在任務執行過程中動態調整任務的優先級,保證最重要任務的優先完成。
21、優選的,所述傳感器數據處理模塊包括:
22、數據預處理單元,用于對各類數據進行處理,包括去噪和濾波;
23、數據融合單元,用于將所有數據融合,以生成統一的環境感知數據;
24、實時數據處理單元,用于根據實時傳感器反饋更新機器人當前環境模型,并為路徑規劃和控制模塊提供動態數據支持。
25、優選的,所述最優路徑規劃模塊包括:
26、路徑計算單元,用于根據任務要求和機器人當前位置計算最短路徑,并考慮實時環境因素;
27、路徑優化單元,用于在路徑計算結果的基礎上進行優化,考慮能量消耗、速度限制和避障需求的約束,生成最優路徑;
28、實時路徑調整單元,用于根據機器人實時反饋數據調整當前行進路徑,確保巡檢任務的高效執行。
29、本發明提供了煤礦井下巡檢機器人工作平臺及其控制系統。具備以下有益效果:
30、1、本發明通過調節機構調節前端觀察攝像頭的角度,讓攝像頭可以根據需要實時改變視角,捕捉不同位置的圖像數據。與現有技術中固定視角的方案相比,這種調節方式讓機器人在復雜的空間中更加靈活,尤其適合煤礦井那種狹小、高低不平的環境。攝像頭的多角度調節提升了巡檢的精度和效率,避免了由于視角限制而錯過重要檢查點。
31、2、本發明通過清障機構主動清理障礙物,確保機器人能平穩行進并保持前端觀察攝像頭的穩定。提升了機器人的工作連續性,避免了因障礙物阻擋而導致的路徑偏離或停滯。相比現有技術中依賴人工或被動清理的方案,本發明的主動清障機制有效減少了停機時間,并提高了巡檢任務的完成效率和精度。
32、3、本發明通過集成多種傳感器,包括氣體檢測儀、路徑定位傳感器、激光測距儀和超聲波傳感器,通過數據融合提升了巡檢的精準度和實時性。相較于傳統單一傳感器的系統,本發明通過多種傳感器的協同工作,能更全面地監測煤礦井的環境變化,避免了單一數據源可能帶來的信息偏差,提升了系統的穩定性和安全性。
- 還沒有人留言評論。精彩留言會獲得點贊!