可同步控制的欠驅動機械手
本公開的至少一種實施例涉及機械臂,尤其涉及一種可同步控制的欠驅動機械手。
背景技術:
1、隨著機器人的快速發展,在勞動強度大、條件艱苦的工作環境中,機器人發揮了至關重要的作用。
2、單自由度的夾鉗機械手可以實現抓取形狀規則的物品。然而,面對形狀復雜的物品或者尺寸較長的條狀物品,物品的表面狀況會影響單自由度的夾鉗機械手抓取的穩定性,導致難以完成抓取動作或導致物品與夾鉗機械手脫離的情況。因此,單自由度的夾鉗機械手抓取的物品的形狀受限,抓取穩定性不佳。
技術實現思路
1、有鑒于此,本公開提供了一種可同步控制的欠驅動機械手,用于至少部分解決以上技術問題,提高可同步控制的欠驅動機械手的穩定性和適用性。
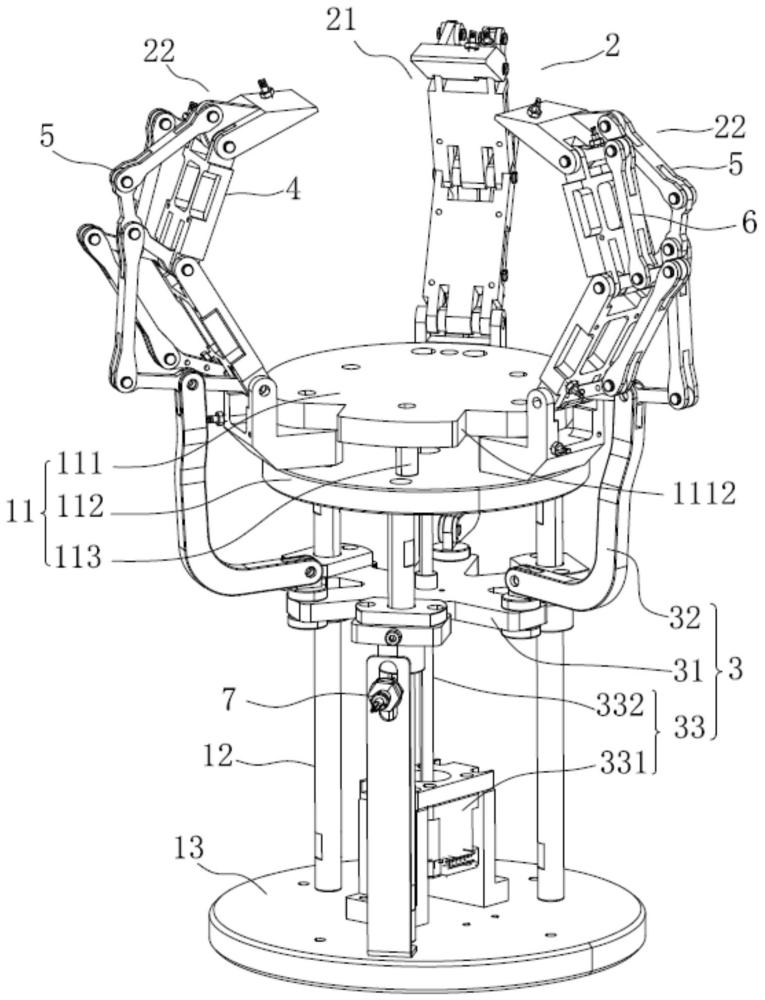
2、本公開的實施例提供一種可同步控制的欠驅動機械手,包括:安裝機構;三組執行機構,包括:第一執行機構,設置于所述安裝機構;兩組第二執行機構,繞第一方向的軸線可轉動地設置于所述安裝機構,包括相互面對的第一狀態和相互平行的第二狀態;驅動機構,設置于所述安裝機構,被構造成調節三組所述執行機構的位姿,使得所述執行機構調整至抓取物品的抓取狀態或將物品釋放的釋放狀態。
3、根據本公開的實施例,三組所述執行機構均勻間隔分布,兩組所述第二執行機構還包括與所述第一執行機構繞所述第一方向的軸線中心對稱的第三狀態。
4、根據本公開的實施例,所述安裝機構包括:安裝組件,所述第二執行機構可轉動地設置于所述安裝組件;鎖定組件,設置于所述安裝組件,被構造成具有阻止所述第二執行機構相對于所述安裝組件轉動的鎖定狀態和允許所述第二執行機構轉動的解鎖狀態。
5、根據本公開的實施例,所述安裝組件包括:第一限位件,被構造成在所述第一狀態時,所述第二執行機構與所述第一限位件抵接;第二限位件,被構造成在所述第二狀態時,所述第二執行機構與所述第一限位件抵接。
6、根據本公開的實施例,所述驅動機構包括:連接組件;三組驅動臂,繞所述第一方向的軸線可轉動地設置于所述連接組件,三組所述驅動臂分別與三組所述執行機構鉸接;驅動組件,被構造成驅動所述連接組件在所述第一方向上往復移動,以驅動三組所述執行機構調整至所述抓取狀態或所述釋放狀態。
7、根據本公開的實施例,所述驅動組件包括:驅動件,設置于所述安裝機構;絲桿,與所述連接組件螺紋配合,被構造成在所述驅動件的驅動下轉動,以驅動所述連接組件在所述第一方向上往復移動。
8、根據本公開的實施例,所述執行機構包括:執行臂,繞所述第一方向的軸線可轉動地安裝于所述安裝機構,所述執行臂包括多個首尾相互鉸接的關節臂,并在所述第一方向上延伸;連接機構,活動連接于所述執行臂,并與所述驅動臂鉸接,以驅動多個所述關節臂轉動;約束機構,連接于所述執行臂,被構造成約束所述執行臂,使得所述執行臂在所述連接機構的驅動下轉動至所述抓取狀態或所述釋放狀態。
9、根據本公開的實施例,多個所述關節臂包括通過三個鉸接軸依次首尾鉸接的第一臂、第二臂、第三臂和第四臂,所述鉸接軸與所述第一方向垂直,三個所述鉸接軸包括第一鉸接軸、第二鉸接軸和第三鉸接軸;所述約束機構包括:兩個約束臂,包括與所述第二臂平行的第一約束臂和與所述第三臂平行的第二約束臂;相互平行的三個連接臂,包括:第一連接臂,鉸接于所述第一鉸接軸和所述第一約束臂的第一端;第二連接臂,鉸接于所述第二鉸接軸和所述第一約束臂的第二端,所述第二約束臂的第一端鉸接于所述第二連接臂的中部;第三連接臂,鉸接于所述第三鉸接軸和所述第二約束臂的第二端;兩個彈性件,可彈性地設置于所述執行臂背離所述物品的一側,兩個所述彈性件包括設置于所述第一臂與所述第二臂之間的第一彈性件,及設置于所述第四臂與所述第三連接臂之間的第二彈性件。
10、根據本公開的實施例,所述連接機構包括:第一支臂,所述第一支臂的第一端鉸接于所述第一鉸接軸,并與所述第二臂形成銳角,所述驅動臂鉸接于所述第一支臂的中部,以驅動所述第一支臂轉動;第二支臂,所述第二支臂的第一端鉸接于所述第一支臂的第二端,并形成銳角;第三支臂,所述第三支臂的第一端鉸接于所述第二鉸接軸,并與所述第三臂形成銳角,所述第二支臂的第二端鉸接于所述第三支臂的中部,并形成銳角;第四支臂,所述第四支臂的第一端鉸接于所述第三支臂的第二端,所述第四支臂的第二端通過轉動軸鉸接于所述第一臂,使得所述轉動軸與所述第三鉸接軸的連線與所述第四支臂形成銳角。
11、根據本公開的實施例,可同步控制的欠驅動機械手還包括位置傳感器,設置于所述安裝機構,被配置為檢測所述連接組件的位置,以獲取所述執行機構的位姿。
12、根據本公開提供的可同步控制的欠驅動機械手,在使用時,驅動機構調節三組執行機構的位姿,使得執行機構調整至抓取狀態,以抓取物品,或者調整至釋放狀態,以釋放物品。根據待抓取物品的形狀,繞第一方向的軸線轉動兩組第二執行機構,使得兩組第二執行機構調整至相互面對的第一狀態,以抓取一些具有寬度的物品;或者調整至相互平行的第二狀態,以抓取一些條狀的物品,從而提高可同步控制的欠驅動機械手的穩定性和適用性。
技術特征:
1.一種可同步控制的欠驅動機械手,其特征在于,包括:
2.根據權利要求1所述的可同步控制的欠驅動機械手,其特征在于,三組所述執行機構(2)均勻間隔分布,兩組所述第二執行機構(22)還包括與所述第一執行機構(21)繞所述第一方向的軸線中心對稱的第三狀態。
3.根據權利要求1所述的可同步控制的欠驅動機械手,其特征在于,所述安裝機構(1)包括:
4.根據權利要求3所述的可同步控制的欠驅動機械手,其特征在于,所述安裝組件(11)包括:
5.根據權利要求1所述的可同步控制的欠驅動機械手,其特征在于,所述驅動機構(3)包括:
6.根據權利要求5所述的可同步控制的欠驅動機械手,其特征在于,所述驅動組件(33)包括:
7.根據權利要求5所述的可同步控制的欠驅動機械手,其特征在于,所述執行機構(2)包括:
8.根據權利要求7所述的可同步控制的欠驅動機械手,其特征在于,多個所述關節臂包括通過三個鉸接軸依次首尾鉸接的第一臂(41)、第二臂(42)、第三臂(43)和第四臂(44),所述鉸接軸與所述第一方向垂直,三個所述鉸接軸包括第一鉸接軸(45)、第二鉸接軸(46)和第三鉸接軸(47);
9.根據權利要求8所述的可同步控制的欠驅動機械手,其特征在于,所述連接機構(5)包括:
10.根據權利要求5至9中任一項所述的可同步控制的欠驅動機械手,其特征在于,還包括位置傳感器(7),設置于所述安裝機構(1),被配置為檢測所述連接組件(31)的位置,以獲取所述執行機構(2)的位姿。
技術總結
本公開提供了一種可同步控制的欠驅動機械手,包括:安裝機構;三組執行機構,包括:第一執行機構,設置于安裝機構;兩組第二執行機構,繞第一方向的軸線可轉動地設置于安裝機構,包括相互面對的第一狀態和相互平行的第二狀態;驅動機構,設置于安裝機構,被構造成調節三組執行機構的位姿,使得執行機構調整至抓取物品的抓取狀態或將物品釋放的釋放狀態。
技術研發人員:潘立志,倫嘉朋,李進華
受保護的技術使用者:天津大學醫療機器人與智能系統研究院
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!