一種具有并聯(lián)緩沖機構(gòu)的光伏板清理機器人
本發(fā)明涉及光伏系統(tǒng)清潔,尤其涉及一種具有并聯(lián)緩沖機構(gòu)的光伏板清理機器人。
背景技術(shù):
1、隨著全球能源結(jié)構(gòu)的轉(zhuǎn)型和環(huán)境保護意識的提升,光伏發(fā)電技術(shù)因其可持續(xù)性、環(huán)保性和清潔性而成為理想的可再生能源技術(shù)之一。光伏發(fā)電技術(shù)的核心是光伏板,它能夠?qū)⑻柲苤苯愚D(zhuǎn)換為電能。然而,光伏板在長期運行過程中,表面容易積累風沙、灰塵等污垢,這不僅降低了光伏板的光電轉(zhuǎn)化效率,最高可達60%的效率損失,還可能導致熱島效應,使光伏板局部過熱而損壞。因此,光伏板的清潔工作對于保持其高效運行至關(guān)重要。
2、我國西北地區(qū)以其豐富的太陽能資源而成為光伏電站建設(shè)的熱點區(qū)域。該地區(qū)風沙量大、干旱少雨、地面起伏較大的自然環(huán)境條件,對光伏電站的運維提出了更高的要求。現(xiàn)有技術(shù)通常依賴人工來清潔維護光伏電站,這種方式效率低下且耗水量大。另有一些大型光伏電站采用自動清潔機器人對光伏板進行定期清潔維護。然而,傳統(tǒng)的自動清潔機器人主要適用于平坦的地面光伏電站,在野外山地光伏電站中,由于地形的不平坦和坡度變化,機器人的移動和定位變得異常復雜。隨著光伏電站的建設(shè)逐漸向野外山地擴展,光伏板的清潔工作面臨新的挑戰(zhàn)。野外山地地形復雜、地面起伏較大,這給光伏板的清潔機器人的自動化作業(yè)帶來了極大的困難。
3、有鑒于此,亟需一種能夠在西北地區(qū)復雜環(huán)境條件下完成光伏電站清理工作的光伏板清理機器人來解決上述問題。
技術(shù)實現(xiàn)思路
1、本發(fā)明的目的是提供一種具有并聯(lián)緩沖機構(gòu)的光伏板清理機器人,用以解決現(xiàn)有技術(shù)存在的上述技術(shù)問題。
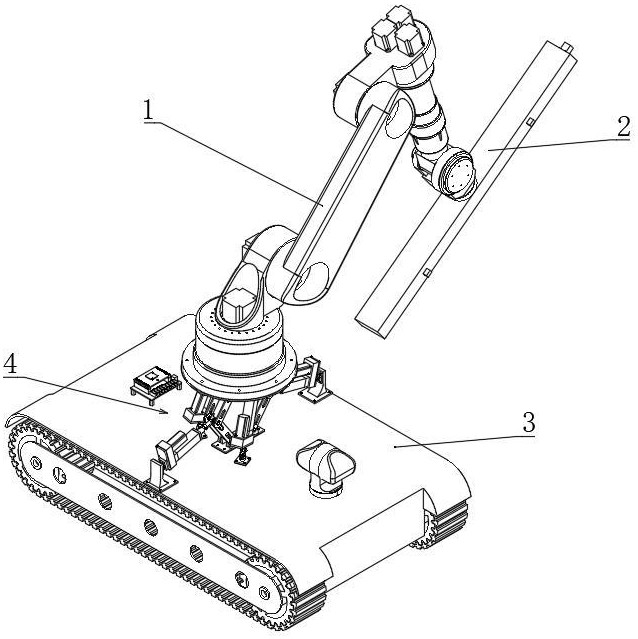
2、為實現(xiàn)上述目的,本發(fā)明提供了如下方案:一種具有并聯(lián)緩沖機構(gòu)的光伏板清理機器人,包括:
3、行走機構(gòu),行走機構(gòu)具有行走底盤,行走底盤上安裝有控制組件;
4、并聯(lián)緩沖機構(gòu),包括支撐板,支撐板和所述行走機構(gòu)之間活動連接有中間執(zhí)行機構(gòu),支撐板底部對稱安裝有第三驅(qū)動分支和第四驅(qū)動分支,所述第三驅(qū)動分支和第四驅(qū)動分支分別位于所述中間執(zhí)行機構(gòu)的前后兩側(cè);中間執(zhí)行機構(gòu)的左右兩側(cè)活動連接有第一驅(qū)動分支和第二驅(qū)動分支;在第一驅(qū)動分支、第二驅(qū)動分支、第三驅(qū)動分支和第四驅(qū)動分支的作用下,所述支撐板能實現(xiàn)沿x軸、y軸的位移,以及繞x軸、y軸的轉(zhuǎn)動;
5、機械臂,安裝在所述支撐板上方,所述機械臂活動端安裝有清理機構(gòu),所述控制組件控制所述機械臂將所述清理機構(gòu)移動并貼合至光伏板表面。
6、可選地,所述機械臂包括依次轉(zhuǎn)動連接的機械臂底座、機械臂第一連桿、機械臂第二連桿、機械臂第三連桿、機械臂第四連桿、機械臂第五連桿和機械臂第六連桿,以及驅(qū)動各連桿回轉(zhuǎn)或俯仰的驅(qū)動電機。
7、可選地,所述機械臂底座安裝于所述支撐板上,且在所述機械臂底座和所述支撐板之間設(shè)置有多個位姿傳感器,所述位姿傳感器與所述控制組件電連接。
8、可選地,所述清理機構(gòu)包括殼體、滾刷電機和滾刷,所述滾刷電機固接在所述殼體的一側(cè),所述滾刷的一端與所述滾刷電機相連,另一端與所述殼體轉(zhuǎn)動連接。
9、可選地,所述殼體朝向光伏的一面上安裝有距離傳感器,所述距離傳感器與所述控制組件電連接,用于獲取所述清理機構(gòu)與光伏板的距離。
10、可選地,所述殼體朝向光伏的一面上安裝有角度傳感器,所述角度傳感器與所述控制組件電連接,用于獲取所述清理機構(gòu)相對于光伏板的傾斜角度。
11、可選地,所述清理機構(gòu)與所述機械臂可拆卸連接。
12、可選地,所述行走機構(gòu)的行走底盤上安裝有雙目攝像頭,所述雙目攝像頭與所述控制組件信號連接。
13、可選地,所述中間執(zhí)行機構(gòu)包括兩個對稱的連接底座,兩所述連接底座上分別轉(zhuǎn)動連接有雙連桿調(diào)節(jié)結(jié)構(gòu),兩所述雙連桿調(diào)節(jié)結(jié)構(gòu)頂部連接至同一中間支座上,所述中間支座上轉(zhuǎn)軸連接豎向的支撐桿,所述支撐桿遠離所述中間支座的一端固接于所述支撐板的底部中央。
14、可選地,所述中間支座內(nèi)間隔固接有兩個隔板,兩所述隔板之間固接有支撐軸,所述支撐桿的一端轉(zhuǎn)動連接在所述支撐軸上。
15、與現(xiàn)有技術(shù)相比,本發(fā)明至少公開以下有益效果:
16、本發(fā)明提出一種光伏板清潔機器人,該機器人搭載了一套并聯(lián)緩沖機構(gòu),以適應復雜多變的地形條件。機器人通過其行走機構(gòu)能夠在各種路面上穩(wěn)定行駛。當遇到不平坦的路面時,該并聯(lián)緩沖機構(gòu)和機械臂協(xié)同工作,確保清掃機構(gòu)始終緊密貼合光伏板表面,從而保持高效的清潔效果。并聯(lián)緩沖機構(gòu)和機械臂的設(shè)計允許機器人調(diào)整或保持清掃機構(gòu)與光伏板之間的距離和角度,以適應由于復雜路面引起的高頻小幅振動和低頻大幅變化。這種設(shè)計使得機器人能夠在不同的路面條件下,持續(xù)保持與光伏板的接觸,確保清潔工作的有效性,提高光伏板的清潔效率和光伏電站的整體性能。
技術(shù)特征:
1.一種具有并聯(lián)緩沖機構(gòu)的光伏板清理機器人,其特征在于,包括:
2.根據(jù)權(quán)利要求1所述的具有并聯(lián)緩沖機構(gòu)的光伏板清理機器人,其特征在于,所述機械臂(1)包括依次轉(zhuǎn)動連接的機械臂底座(101)、機械臂第一連桿(103)、機械臂第二連桿(105)、機械臂第三連桿(107)、機械臂第四連桿(111)、機械臂第五連桿(112)和機械臂第六連桿(113),以及驅(qū)動各連桿回轉(zhuǎn)或俯仰的驅(qū)動電機。
3.根據(jù)權(quán)利要求2所述的具有并聯(lián)緩沖機構(gòu)的光伏板清理機器人,其特征在于,所述機械臂底座(101)安裝于所述支撐板(450)上,且在所述機械臂底座(101)和所述支撐板(450)之間設(shè)置有多個位姿傳感器(460),所述位姿傳感器(460)與所述控制組件(302)電連接。
4.根據(jù)權(quán)利要求1所述的具有并聯(lián)緩沖機構(gòu)的光伏板清理機器人,其特征在于,所述清理機構(gòu)(2)包括殼體(205)、滾刷電機(202)和滾刷(203),所述滾刷電機(202)固接在所述殼體(205)的一側(cè),所述滾刷(203)的一端與所述滾刷電機(202)相連,另一端與所述殼體(205)轉(zhuǎn)動連接。
5.根據(jù)權(quán)利要求4所述的具有并聯(lián)緩沖機構(gòu)的光伏板清理機器人,其特征在于,所述殼體(205)朝向光伏的一面上安裝有距離傳感器(201),所述距離傳感器(201)與所述控制組件(302)電連接,用于獲取所述清理機構(gòu)(2)與光伏板的距離。
6.根據(jù)權(quán)利要求4所述的具有并聯(lián)緩沖機構(gòu)的光伏板清理機器人,其特征在于,所述殼體(205)朝向光伏的一面上安裝有角度傳感器(204),所述角度傳感器(204)與所述控制組件(302)電連接,用于獲取所述清理機構(gòu)(2)相對于光伏板的傾斜角度。
7.根據(jù)權(quán)利要求1或4所述的具有并聯(lián)緩沖機構(gòu)的光伏板清理機器人,其特征在于,所述清理機構(gòu)(2)與所述機械臂(1)可拆卸連接。
8.根據(jù)權(quán)利要求1所述的具有并聯(lián)緩沖機構(gòu)的光伏板清理機器人,其特征在于,所述行走機構(gòu)(3)的行走底盤(301)上安裝有雙目攝像頭(303),所述雙目攝像頭(303)與所述控制組件(302)信號連接。
9.根據(jù)權(quán)利要求1所述的具有并聯(lián)緩沖機構(gòu)的光伏板清理機器人,其特征在于,所述中間執(zhí)行機構(gòu)(400)包括兩個對稱的連接底座(401),兩所述連接底座(401)上分別轉(zhuǎn)動連接有雙連桿調(diào)節(jié)結(jié)構(gòu),兩所述雙連桿調(diào)節(jié)結(jié)構(gòu)頂部連接至同一中間支座(407)上,所述中間支座(407)上轉(zhuǎn)軸連接豎向的支撐桿(409),所述支撐桿(409)遠離所述中間支座(407)的一端固接于所述支撐板(450)的底部中央。
10.根據(jù)權(quán)利要求9所述的具有并聯(lián)緩沖機構(gòu)的光伏板清理機器人,其特征在于,所述中間支座(407)內(nèi)間隔固接有兩個隔板,兩所述隔板之間固接有支撐軸(408),所述支撐桿(409)的一端轉(zhuǎn)動連接在所述支撐軸(408)上。
技術(shù)總結(jié)
本發(fā)明公開一種具有并聯(lián)緩沖機構(gòu)的光伏板清理機器人,涉及光伏系統(tǒng)清潔技術(shù)領(lǐng)域,包括行走機構(gòu),行走機構(gòu)上安裝控制組件和并聯(lián)緩沖機構(gòu),并聯(lián)緩沖機構(gòu)包括支撐板和連接于支撐板和行走機構(gòu)之間的中間執(zhí)行機構(gòu),以及位于中間執(zhí)行機構(gòu)四周的四個驅(qū)動分支,在四個驅(qū)動分支的作用下,實現(xiàn)支撐板沿X軸、Z軸的位移,繞X軸、Y軸的轉(zhuǎn)動,支撐板上安裝機械臂,機械臂活動端連接清理機構(gòu)。控制組件控制并聯(lián)緩沖機構(gòu)和機械臂抵消五個方向自由度的路面起伏,并控制機械臂將清理機構(gòu)貼合光伏板。本發(fā)明清理機器人通過控制組件和并聯(lián)緩沖機構(gòu)的協(xié)調(diào)配合,能夠適應西北地區(qū)復雜的路面情況,在野外山地等復雜環(huán)境中能夠有效地完成清潔任務。
技術(shù)研發(fā)人員:張金柱,郭振昕,杜宏杰,馬慶明,熊曉燕,姚伯澤,楊紹信
受保護的技術(shù)使用者:太原理工大學
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!