可視化螺栓緊固裝置的制作方法
本發明涉及檢修工具,具體而言,涉及一種可視化螺栓緊固裝置。
背景技術:
1、在當前的電力系統技術實踐中,為了確保線夾和線纜能夠穩固地安裝在導線上,常規做法是使用螺栓進行固定。然而,經過長期運行后,螺栓連接往往會出現預緊力不足甚至松脫的現象,這對電網的安全穩定運行構成了嚴重威脅。
2、現有技術中在應對電網檢修中的螺栓擰緊工作,是通過操作人員根據自己的經驗來瞄準螺栓,這樣操作難度高,工作效率低。
技術實現思路
1、本發明提供了一種可視化螺栓緊固裝置,以解決現有技術中的螺栓擰緊工作憑借經驗判斷而導致的工作效率低的問題。
2、為了解決上述問題,本發明提供了一種可視化螺栓緊固裝置,包括基座、轉向部、電動扳手、圖像采集單元和遙控單元,轉向部安裝于基座,電動扳手安裝于轉向部,轉向部用于調整電動扳手的位置,圖像采集單元安裝于電動扳手,圖像采集單元用于采集操作區域的圖像,圖像采集單元和轉向部均和遙控單元電連接,遙控單元顯示圖像采集單元采集的圖像,操作人員根據顯示的圖像操作遙控單元,遙控單元控制轉向部動作,以使電動扳手對準操作區域的螺栓。
3、進一步地,電動扳手包括扳手主體和安裝于扳手主體的套筒,圖像采集單元安裝于扳手主體或套筒,圖像采集單元包括攝像頭和無線傳輸模塊,攝像頭用于采集操作區域的圖像,無線傳輸模塊用于將采集的圖像傳輸至遙控單元。
4、進一步地,可視化螺栓緊固裝置還包括遙控接收模塊和控制模塊,遙控接收模塊設置于基座或轉向部,遙控接收模塊接收遙控單元發出的控制信號并將控制信號傳遞至控制模塊,控制模塊根據控制信號控制轉向部和電動扳手動作。
5、進一步地,控制模塊包括第一控制板和第二控制板,第一控制板、第二控制板均和遙控接收模塊電連接,第一控制板安裝于基座或轉向部,第一控制板用于控制轉向部,第二控制板安裝于基座或電動扳手,第二控制板用于控制電動扳手;遙控單元包括顯示屏和遙控發射模塊,顯示屏用于顯示圖像采集單元采集的圖像,遙控發射模塊供操作人員操作以發出控制信號。
6、進一步地,轉向部包括第一轉向機構和第二轉向機構,第一轉向機構安裝于基座,第二轉向機構安裝于第一轉向機構,電動扳手安裝于第二轉向機構;其中,第一轉向機構用于控制第二轉向機構和電動扳手繞第一軸線擺動,第二轉向機構用于控制電動扳手繞第二軸線擺動,第二軸線垂直于第一軸線。
7、進一步地,第一轉向機構包括第一驅動機構、第一傳動機構、第一轉軸和第一轉體,第一驅動機構固定安裝于基座,第一轉軸轉動安裝于基座,第一驅動機構通過第一傳動機構驅動第一轉軸擺動,第一轉體和第一轉軸連接,第一轉軸驅動第一轉體擺動,第二轉向機構安裝于第一轉體。
8、進一步地,第一傳動機構包括相互嚙合的第一蝸輪和第一蝸桿,第一蝸輪套裝于第一轉軸,第一驅動機構驅動第一蝸桿運動,第一蝸桿驅動第一蝸輪轉動,以使第一轉軸和第一轉體運動。
9、進一步地,第二轉向機構包括第二驅動機構、第二傳動機構、第二轉軸和第二轉體,第二驅動機構固定安裝于第一轉體,第二轉軸轉動安裝于第一轉體,第二驅動機構通過第二傳動機構驅動第二轉軸擺動,第二轉體和第二轉軸連接,第二轉軸驅動第二轉體擺動,電動扳手安裝于第二轉體。
10、進一步地,第二傳動機構包括相互嚙合的第二蝸輪和第二蝸桿,第二蝸輪套裝于第二轉軸,第二驅動機構驅動第二蝸桿運動,第二蝸桿驅動第二蝸輪轉動,以使第二轉軸和電動扳手運動。
11、進一步地,可視化螺栓緊固裝置還包括第一限位模塊和第二限位模塊,第一限位模塊固定安裝于基座,第一限位模塊和第一轉體止擋配合以限定第一轉體的轉動范圍,第二限位模塊固定安裝于第一轉體,第二限位模塊和第二轉體止擋配合以限定第二轉體的轉動范圍。
12、應用本發明的技術方案,通過安裝在電動扳手上的圖像采集單元,能夠實時采集操作區域的圖像,如螺栓的位置、形態、狀態等,并將圖像傳輸給遙控單元進行顯示,使得操作人員可以不用憑借自己的經驗來判斷螺栓的情況,能夠實時觀察到螺栓和周圍環境,從而精確判斷電動扳手的對準情況。還可以通過遙控單元控制轉向部的動作,精準地調整電動扳手的位置,確保電動扳手對準目標螺栓,這樣可以減少人工操作的偏差,確保螺栓的正確緊固,提高工作效率。而且這樣還減少了操作人員需要彎腰或者低頭確認的情況,減少了因操作不當或疲勞導致的意外傷害,提高了工作的安全性。
技術特征:
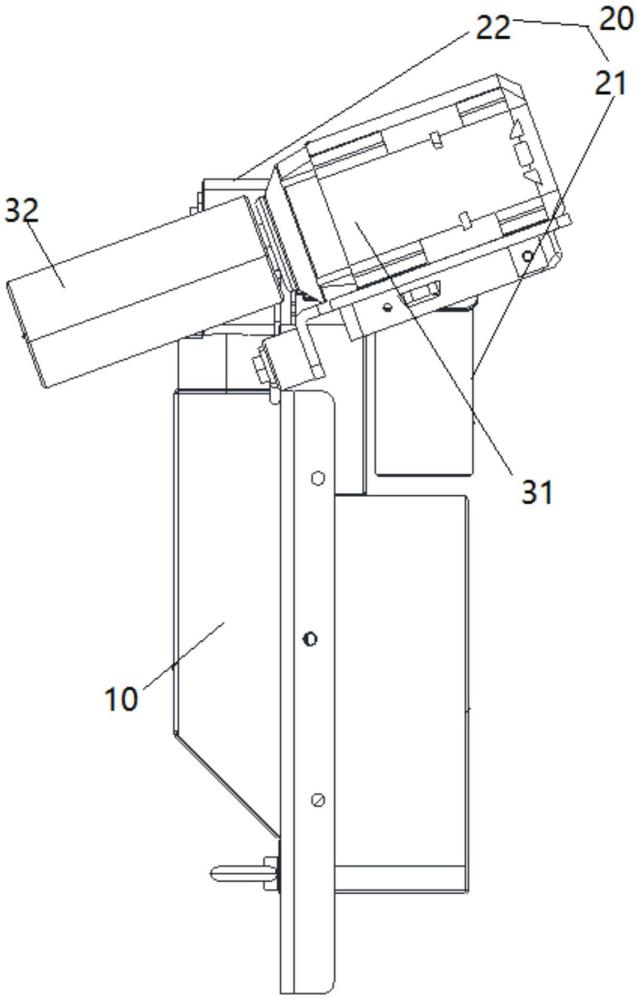
1.一種可視化螺栓緊固裝置,其特征在于,包括基座(10)、轉向部(20)、電動扳手(30)、圖像采集單元(40)和遙控單元,所述轉向部(20)安裝于所述基座(10),所述電動扳手(30)安裝于所述轉向部(20),所述轉向部(20)用于調整所述電動扳手(30)的位置,所述圖像采集單元(40)安裝于所述電動扳手(30),所述圖像采集單元(40)用于采集操作區域的圖像,所述圖像采集單元(40)和所述轉向部(20)均和所述遙控單元電連接,所述遙控單元顯示所述圖像采集單元(40)采集的圖像,操作人員根據顯示的圖像操作所述遙控單元,所述遙控單元控制所述轉向部(20)動作,以使所述電動扳手(30)對準操作區域的螺栓。
2.根據權利要求1所述的可視化螺栓緊固裝置,其特征在于,所述電動扳手(30)包括扳手主體(31)和安裝于所述扳手主體(31)的套筒(32),所述圖像采集單元(40)安裝于所述扳手主體(31)或所述套筒(32),所述圖像采集單元(40)包括攝像頭和無線傳輸模塊,所述攝像頭用于采集操作區域的圖像,所述無線傳輸模塊用于將采集的圖像傳輸至所述遙控單元。
3.根據權利要求1所述的可視化螺栓緊固裝置,其特征在于,所述可視化螺栓緊固裝置還包括遙控接收模塊和控制模塊,所述遙控接收模塊設置于所述基座(10)或所述轉向部(20),所述遙控接收模塊接收所述遙控單元發出的控制信號并將控制信號傳遞至所述控制模塊,所述控制模塊根據控制信號控制所述轉向部(20)和所述電動扳手(30)動作。
4.根據權利要求3所述的可視化螺栓緊固裝置,其特征在于,所述控制模塊包括第一控制板和第二控制板,所述第一控制板、所述第二控制板均和所述遙控接收模塊電連接,所述第一控制板安裝于所述基座(10)或所述轉向部(20),所述第一控制板用于控制所述轉向部(20),所述第二控制板安裝于所述基座(10)或所述電動扳手(30),所述第二控制板用于控制所述電動扳手(30);所述遙控單元包括顯示屏和遙控發射模塊,所述顯示屏用于顯示所述圖像采集單元(40)采集的圖像,所述遙控發射模塊供操作人員操作以發出控制信號。
5.根據權利要求1所述的可視化螺栓緊固裝置,其特征在于,所述轉向部(20)包括第一轉向機構(21)和第二轉向機構(22),所述第一轉向機構(21)安裝于所述基座(10),所述第二轉向機構(22)安裝于所述第一轉向機構(21),所述電動扳手(30)安裝于所述第二轉向機構(22);其中,所述第一轉向機構(21)用于控制所述第二轉向機構(22)和所述電動扳手(30)繞第一軸線擺動,所述第二轉向機構(22)用于控制所述電動扳手(30)繞第二軸線擺動,所述第二軸線垂直于所述第一軸線。
6.根據權利要求5所述的可視化螺栓緊固裝置,其特征在于,所述第一轉向機構(21)包括第一驅動機構、第一傳動機構、第一轉軸(211)和第一轉體(212),所述第一驅動機構固定安裝于所述基座(10),所述第一轉軸(211)轉動安裝于所述基座(10),所述第一驅動機構通過所述第一傳動機構驅動所述第一轉軸(211)擺動,所述第一轉體(212)和所述第一轉軸(211)連接,所述第一轉軸(211)驅動所述第一轉體(212)擺動,所述第二轉向機構(22)安裝于所述第一轉體(212)。
7.根據權利要求6所述的可視化螺栓緊固裝置,其特征在于,所述第一傳動機構包括相互嚙合的第一蝸輪和第一蝸桿,所述第一蝸輪套裝于所述第一轉軸(211),所述第一驅動機構驅動所述第一蝸桿運動,所述第一蝸桿驅動所述第一蝸輪轉動,以使所述第一轉軸(211)和所述第一轉體(212)運動。
8.根據權利要求6所述的可視化螺栓緊固裝置,其特征在于,所述第二轉向機構(22)包括第二驅動機構、第二傳動機構、第二轉軸(221)和第二轉體(222),所述第二驅動機構固定安裝于所述第一轉體(212),所述第二轉軸(221)轉動安裝于所述第一轉體(212),所述第二驅動機構通過所述第二傳動機構驅動所述第二轉軸(221)擺動,所述第二轉體(222)和所述第二轉軸(221)連接,所述第二轉軸(221)驅動所述第二轉體(222)擺動,所述電動扳手(30)安裝于所述第二轉體(222)。
9.根據權利要求8所述的可視化螺栓緊固裝置,其特征在于,所述第二傳動機構包括相互嚙合的第二蝸輪和第二蝸桿,所述第二蝸輪套裝于所述第二轉軸(221),所述第二驅動機構驅動所述第二蝸桿運動,所述第二蝸桿驅動所述第二蝸輪轉動,以使所述第二轉軸(221)和所述電動扳手(30)運動。
10.根據權利要求8所述的可視化螺栓緊固裝置,其特征在于,所述可視化螺栓緊固裝置還包括第一限位模塊和第二限位模塊,所述第一限位模塊固定安裝于所述基座(10),所述第一限位模塊和所述第一轉體(212)止擋配合以限定所述第一轉體(212)的轉動范圍,所述第二限位模塊固定安裝于所述第一轉體(212),所述第二限位模塊和所述第二轉體(222)止擋配合以限定所述第二轉體(222)的轉動范圍。
技術總結
本發明提供了一種可視化螺栓緊固裝置,包括基座、轉向部、電動扳手、圖像采集單元和遙控單元,轉向部安裝于基座,電動扳手安裝于轉向部,轉向部用于調整電動扳手的位置,圖像采集單元安裝于電動扳手,圖像采集單元用于采集操作區域的圖像,圖像采集單元和轉向部均和遙控單元電連接,遙控單元顯示圖像采集單元采集的圖像,操作人員根據顯示的圖像操作遙控單元,遙控單元控制轉向部動作,以使電動扳手對準操作區域的螺栓。通過安裝在電動扳手上的圖像采集單元,實時采集操作區域的圖像,這樣操作人員可以不用憑借自己的經驗來判斷螺栓的情況,能夠實時觀察到螺栓和周圍環境,從而精確判斷電動扳手的對準情況,確保螺栓的正確緊固,提高工作效率。
技術研發人員:潘金虎,段賽飛,董光哲,趙留學,施翔,聶鵬高,竇天昊,張瀟,王天賜
受保護的技術使用者:國網北京市電力公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!