車輛彎道行駛輔助設(shè)備和輔助方法與流程
本發(fā)明總體上涉及車輛控制的,尤其涉及一種彎道行駛場景下車輛控制的技術(shù)。
背景技術(shù):
1、在車輛彎道行駛場景下,尤其是山路轉(zhuǎn)彎的場景下,可能因?yàn)檫^高的車速而導(dǎo)致事故。另外,當(dāng)車輛在彎道上行駛時(shí),如果遇到暴雨或冰雪等惡劣天氣,而駕駛員依然按照平時(shí)的駕駛習(xí)慣來進(jìn)行轉(zhuǎn)彎操作,發(fā)生事故的風(fēng)險(xiǎn)將會(huì)增加。因此,亟需研究針對車輛彎道行駛的技術(shù)方案,以期提升車輛彎道行駛的安全性。
技術(shù)實(shí)現(xiàn)思路
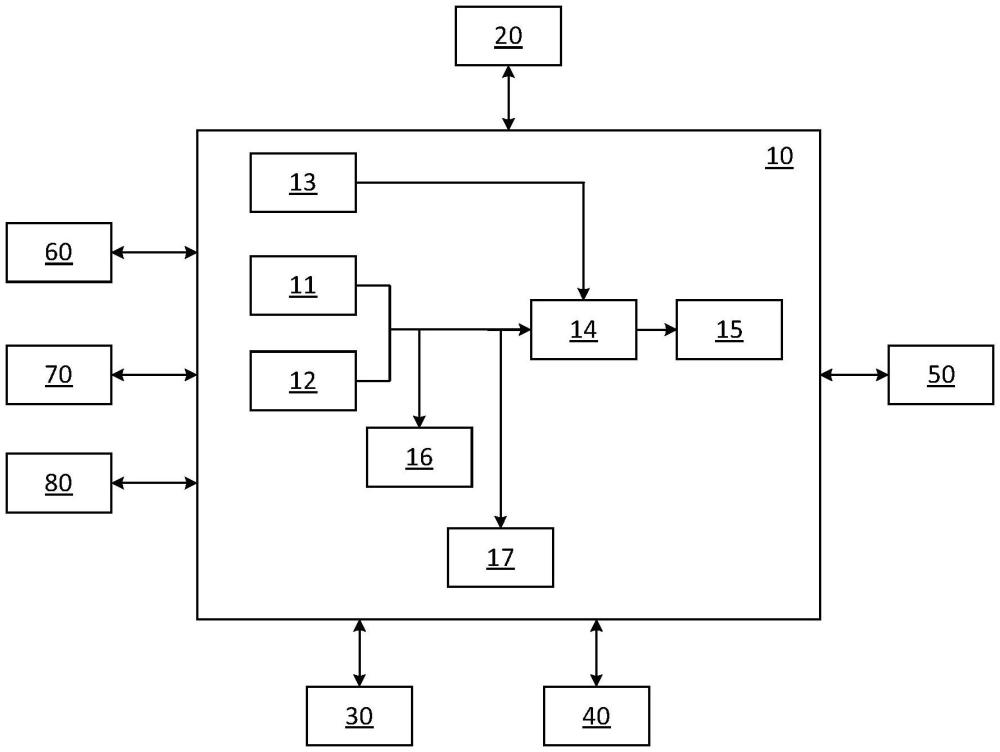
1、在此背景下,根據(jù)本發(fā)明一個(gè)方面的實(shí)施例,提出了一種用于車輛的彎道行駛輔助設(shè)備,其包括:曲率信息模塊,配置成獲取車輛前方行駛彎道的曲率相關(guān)信息,并基于該信息確定彎道上多個(gè)位置點(diǎn)的多個(gè)曲率;附著系數(shù)模塊,配置成獲取所述車輛行駛彎道的路面附著系數(shù)相關(guān)信息,并基于該信息確定所述多個(gè)位置點(diǎn)的多個(gè)路面附著系數(shù);以及車速模塊,配置成基于所述多個(gè)曲率和所述多個(gè)路面附著系數(shù)確定出多個(gè)最大允許車速,分別表示車輛駛經(jīng)所述多個(gè)位置點(diǎn)中的每個(gè)位置點(diǎn)時(shí)車速的最大允許值。
2、根據(jù)本發(fā)明另一個(gè)方面的實(shí)施例,提供了一種車輛,其包括根據(jù)本發(fā)明實(shí)施例的彎道行駛輔助設(shè)備。
3、根據(jù)本發(fā)明又一個(gè)方面的實(shí)施例,提供了一種用于車輛的彎道行駛輔助方法,其包括:獲取車輛前方行駛彎道的曲率相關(guān)信息,并基于該信息確定彎道上多個(gè)位置點(diǎn)的多個(gè)曲率;獲取所述車輛行駛彎道的路面附著系數(shù)相關(guān)信息,并基于該信息確定所述多個(gè)位置點(diǎn)的多個(gè)路面附著系數(shù);以及基于所述多個(gè)曲率和所述多個(gè)路面附著系數(shù)確定出多個(gè)最大允許車速,分別表示車輛駛經(jīng)所述多個(gè)位置點(diǎn)中的每個(gè)位置點(diǎn)時(shí)車速的最大允許值。
4、根據(jù)本發(fā)明再一個(gè)方面的實(shí)施例,提供了一種計(jì)算機(jī)程序產(chǎn)品,其包括計(jì)算機(jī)可執(zhí)行指令,所述指令在被執(zhí)行時(shí)使得一個(gè)或多個(gè)處理器執(zhí)行根據(jù)本發(fā)明實(shí)施例的彎道行駛輔助方法。
5、以上給出了本發(fā)明主要方面的概要,以便能夠?qū)@些方面基本理解。該概要不旨在描述本發(fā)明全部方面的關(guān)鍵或重要元素,也不旨在限定本發(fā)明任一或全部方面的范圍。該概要的目的是以簡化的形式給出這些方面的一些實(shí)現(xiàn),作為后文將給出的詳細(xì)描述的序言。
技術(shù)特征:
1.一種用于車輛的彎道行駛輔助設(shè)備,包括:
2.如權(quán)利要求1所述的彎道行駛輔助設(shè)備,還包括提醒模塊,配置成基于確定出的多個(gè)最大允許車速生成車速提醒消息,并將該車速提醒消息發(fā)送給駕駛員和/或駕駛輔助系統(tǒng)。
3.如權(quán)利要求2所述的彎道行駛輔助設(shè)備,其中,所述提醒模塊配置成:
4.如權(quán)利要求1所述的彎道行駛輔助設(shè)備,其中,所述多個(gè)曲率來自于車輛駕駛輔助系統(tǒng)的攝像頭模塊。
5.如權(quán)利要求1所述的彎道行駛輔助設(shè)備,其中,所述曲率信息模塊配置成:
6.如權(quán)利要求1所述的彎道行駛輔助設(shè)備,其中,所述附著系數(shù)模塊配置成:
7.如權(quán)利要求1所述的彎道行駛輔助設(shè)備,其中,所述附著系數(shù)模塊配置成:
8.如權(quán)利要求7所述的彎道行駛輔助設(shè)備,其中,所述附著系數(shù)模塊配置成:
9.如權(quán)利要求6-8中任一項(xiàng)所述的彎道行駛輔助設(shè)備,其中,所述附著系數(shù)模塊配置成:
10.如權(quán)利要求1所述的彎道行駛輔助設(shè)備,其中,所述車速模塊配置成:
11.如權(quán)利要求1所述的彎道行駛輔助設(shè)備,其中,所述車速差值越大和/或所述相對距離越短,發(fā)出車速提醒消息的時(shí)機(jī)越早。
12.如權(quán)利要求1所述的彎道行駛輔助設(shè)備,還包括坡度信息模塊,配置成獲取坡度相關(guān)信息,并基于該信息確定所述多個(gè)位置點(diǎn)的多個(gè)坡度;
13.如權(quán)利要求1所述的彎道行駛輔助設(shè)備,還包括扭矩分配模塊,配置成:
14.如權(quán)利要求1所述的彎道行駛輔助設(shè)備,還包括懸架控制模塊,配置成:
15.一種車輛,包括如權(quán)利要求1-14中任一項(xiàng)所述的彎道行駛輔助設(shè)備。
16.一種用于車輛的彎道行駛輔助方法,包括:
17.如權(quán)利要求16所述的彎道行駛輔助方法,還包括:
18.如權(quán)利要求17所述的彎道行駛輔助方法,其中,
19.如權(quán)利要求16所述的彎道行駛輔助方法,其中,確定所述多個(gè)曲率包括:
20.如權(quán)利要求16所述的彎道行駛輔助方法,其中,確定所述多個(gè)路面附著系數(shù)包括:
21.如權(quán)利要求16所述的彎道行駛輔助方法,其中,確定所述多個(gè)路面附著系數(shù)包括:
22.一種計(jì)算機(jī)程序產(chǎn)品,其包括計(jì)算機(jī)可執(zhí)行指令,所述指令在被執(zhí)行時(shí)使得一個(gè)或多個(gè)處理器執(zhí)行如權(quán)利要求16-21中任一項(xiàng)所述的彎道行駛輔助方法。
技術(shù)總結(jié)
本發(fā)明的實(shí)施例提供了車輛彎道行駛輔助設(shè)備和輔助方法。該車輛彎道行駛輔助設(shè)備包括:曲率信息模塊,配置成獲取車輛前方行駛彎道的曲率相關(guān)信息,并基于該信息確定彎道上多個(gè)位置點(diǎn)的多個(gè)曲率;附著系數(shù)模塊,配置成獲取所述車輛行駛彎道的路面附著系數(shù)相關(guān)信息,并基于該信息確定所述多個(gè)位置點(diǎn)的多個(gè)路面附著系數(shù);以及車速模塊,配置成基于所述多個(gè)曲率和所述多個(gè)路面附著系數(shù)確定出多個(gè)最大允許車速,分別表示車輛駛經(jīng)所述多個(gè)位置點(diǎn)中的每個(gè)位置點(diǎn)時(shí)車速的最大允許值。
技術(shù)研發(fā)人員:魏浩然,劉平波
受保護(hù)的技術(shù)使用者:博世汽車部件(蘇州)有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/3/16
- 還沒有人留言評論。精彩留言會(huì)獲得點(diǎn)贊!