避障路徑的確定方法、裝置、車輛及存儲介質(zhì)與流程
本技術(shù)涉及汽車,尤其涉及自動駕駛,具體涉及一種避障路徑的確定方法、裝置、車輛及存儲介質(zhì)。
背景技術(shù):
1、自動駕駛技術(shù)作為當(dāng)前人工智能領(lǐng)域的重要應(yīng)用,引起了廣泛的研究和研發(fā)。在自動駕駛系統(tǒng)中,若車輛周圍存在障礙物,車輛可以通過當(dāng)前行駛狀態(tài)確定避障路徑,從而躲避障礙物。
2、目前,避障路徑的設(shè)計通常用于提前躲避障礙物。而撞到障礙物之后,如何設(shè)計避障路徑,確保車輛不會發(fā)生二次碰撞,成為當(dāng)前亟需解決的問題。
技術(shù)實現(xiàn)思路
1、根據(jù)本技術(shù)提供的第一方面,本技術(shù)提供一種避障路徑的確定方法、裝置、車輛及存儲介質(zhì),以至少解決相關(guān)技術(shù)中車輛撞倒障礙物之后容易發(fā)生二次碰撞的技術(shù)問題。
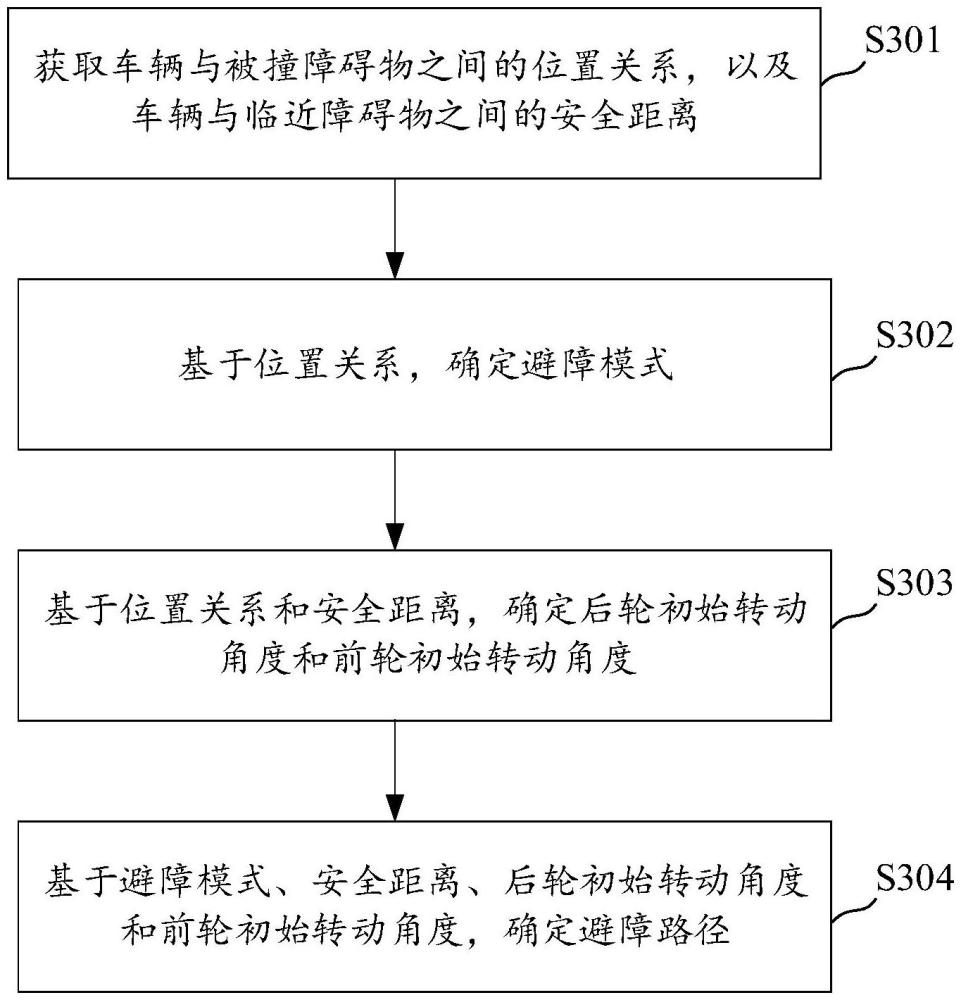
2、本技術(shù)的技術(shù)方案應(yīng)用于車輛。該方法包括:獲取車輛與被撞障礙物之間的位置關(guān)系,以及車輛與臨近障礙物之間的安全距離。基于位置關(guān)系,確定避障模式,避障模式用于指示前輪和后輪的轉(zhuǎn)動方向。基于位置關(guān)系和安全距離,確定后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度。基于避障模式、安全距離、后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度,確定避障路徑,避障路徑為車輛按照后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度進(jìn)行蟹行移動的路徑。
3、在一種可能的實施方式中,基于位置關(guān)系,確定避障模式,包括:若位置關(guān)系用于指示被撞障礙物在車輛的側(cè)后方,則確定避障模式為第一模式,第一模式用于指示前輪和后輪的轉(zhuǎn)動方向相同或者相反。若位置關(guān)系用于指示被撞障礙物在車輛的側(cè)前方,則確定避障模式為第二模式,第二模式用于指示前輪和后輪的轉(zhuǎn)動方向相同。
4、在一種可能的實施方式中,基于位置關(guān)系和安全距離,確定后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度,包括:基于位置關(guān)系和安全距離,確定后輪初始轉(zhuǎn)動角度。基于后輪初始轉(zhuǎn)動角度和預(yù)設(shè)傳動比,確定前輪初始轉(zhuǎn)動角度。
5、在一種可能的實施方式中,基于避障模式、安全距離、后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度,確定避障路徑,包括:基于避障模式、安全距離、后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度,確定在避障路徑中多個前輪轉(zhuǎn)動角度和多個后輪轉(zhuǎn)動角度,一個前輪轉(zhuǎn)動角度對應(yīng)一個后輪轉(zhuǎn)動角度。按照多個前輪轉(zhuǎn)動角度和多個后輪轉(zhuǎn)動角度,確定避障路徑。
6、在一種可能的實施方式中,多個后輪轉(zhuǎn)動角度包括:第一轉(zhuǎn)動角度和第二轉(zhuǎn)動角度,第二轉(zhuǎn)動角度為第一轉(zhuǎn)動角度之后的車輛的后輪轉(zhuǎn)動角度。基于避障模式、安全距離、后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度,確定在避障路徑中多個前輪轉(zhuǎn)動角度和多個后輪轉(zhuǎn)動角度,包括:若避障模式為第一模式,則基于車輛的預(yù)設(shè)速度、安全距離、以及后輪的第一轉(zhuǎn)動角度,確定后輪偏移量,后輪偏移量用于指示在單位時間內(nèi)后輪轉(zhuǎn)動角度的變化量。基于第一轉(zhuǎn)動角度和后輪偏移量,確定第二轉(zhuǎn)動角度。基于多個后輪轉(zhuǎn)動角度和預(yù)設(shè)傳動比,確定多個前輪轉(zhuǎn)動角度。
7、在一種可能的實施方式中,基于車輛的預(yù)設(shè)速度、安全距離、以及后輪的第一轉(zhuǎn)動角度,確定后輪偏移量,包括:基于預(yù)設(shè)速度和安全距離,確定目標(biāo)移動時長。基于目標(biāo)移動時長和第一轉(zhuǎn)動角度,確定后輪偏移量。
8、在一種可能的實施方式中,多個前輪轉(zhuǎn)動角度包括:第三轉(zhuǎn)動角度和第四轉(zhuǎn)動角度,第四轉(zhuǎn)動角度為第三轉(zhuǎn)動角度之后的車輛的前輪轉(zhuǎn)動角度。基于避障模式、安全距離、后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度,確定在避障路徑中多個前輪轉(zhuǎn)動角度和多個后輪轉(zhuǎn)動角度,包括:若避障模式為第二模式,則基于車輛的預(yù)設(shè)速度、安全距離、以及前輪的第三轉(zhuǎn)動角度,確定前輪偏移量,前輪偏移量用于指示在單位時間內(nèi)前輪轉(zhuǎn)動角度的變化量。基于第三轉(zhuǎn)動角度和前輪偏移量,確定第四轉(zhuǎn)動角度。基于多個前輪轉(zhuǎn)動角度和預(yù)設(shè)傳動比,確定多個后輪轉(zhuǎn)動角度。
9、在一種可能的實施方式中,基于車輛的預(yù)設(shè)速度、安全距離、以及前輪的第三轉(zhuǎn)動角度,確定前輪偏移量,包括:基于預(yù)設(shè)速度和安全距離,確定目標(biāo)移動時長。基于目標(biāo)移動時長和第三轉(zhuǎn)動角度,確定前輪偏移量。
10、根據(jù)本技術(shù)提供的第二方面,提供一種避障路徑的確定裝置,應(yīng)用于車輛,裝置包括獲取模塊以及處理模塊。獲取模塊,用于獲取車輛與被撞障礙物之間的位置關(guān)系,以及車輛與臨近障礙物之間的安全距離。處理模塊,用于基于位置關(guān)系,確定避障模式,避障模式用于指示前輪和后輪的轉(zhuǎn)動方向。處理模塊,還用于基于位置關(guān)系和安全距離,確定后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度。處理模塊,還用于基于避障模式、安全距離、后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度,確定避障路徑,避障路徑為車輛按照后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度進(jìn)行蟹行移動的路徑。
11、在一種可能的實施方式中,處理模塊,若位置關(guān)系用于指示被撞障礙物在車輛的側(cè)后方,則確定避障模式為第一模式,第一模式用于指示前輪和后輪的轉(zhuǎn)動方向相同或者相反。處理模塊,還用于若位置關(guān)系用于指示被撞障礙物在車輛的側(cè)前方,則確定避障模式為第二模式,第二模式用于指示前輪和后輪的轉(zhuǎn)動方向相同。
12、在一種可能的實施方式中,處理模塊,用于基于位置關(guān)系和安全距離,確定后輪初始轉(zhuǎn)動角度。處理模塊,還用于基于后輪初始轉(zhuǎn)動角度和預(yù)設(shè)傳動比,確定前輪初始轉(zhuǎn)動角度。
13、在一種可能的實施方式中,處理模塊,用于基于避障模式、安全距離、后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度,確定在避障路徑中多個前輪轉(zhuǎn)動角度和多個后輪轉(zhuǎn)動角度,一個前輪轉(zhuǎn)動角度對應(yīng)一個后輪轉(zhuǎn)動角度。處理模塊,還用于按照多個前輪轉(zhuǎn)動角度和多個后輪轉(zhuǎn)動角度,確定避障路徑。
14、在一種可能的實施方式中,多個后輪轉(zhuǎn)動角度包括:第一轉(zhuǎn)動角度和第二轉(zhuǎn)動角度,第二轉(zhuǎn)動角度為第一轉(zhuǎn)動角度之后的車輛的后輪轉(zhuǎn)動角度。處理模塊,用于若避障模式為第一模式,則基于車輛的預(yù)設(shè)速度、安全距離、以及后輪的第一轉(zhuǎn)動角度,確定后輪偏移量,后輪偏移量用于指示在單位時間內(nèi)后輪轉(zhuǎn)動角度的變化量。處理模塊,還用于基于第一轉(zhuǎn)動角度和后輪偏移量,確定第二轉(zhuǎn)動角度。處理模塊,還用于基于多個后輪轉(zhuǎn)動角度和預(yù)設(shè)傳動比,確定多個前輪轉(zhuǎn)動角度。
15、在一種可能的實施方式中,處理模塊,用于基于預(yù)設(shè)速度和安全距離,確定目標(biāo)移動時長。處理模塊,還用于基于目標(biāo)移動時長和第一轉(zhuǎn)動角度,確定后輪偏移量。
16、在一種可能的實施方式中,多個前輪轉(zhuǎn)動角度包括:第三轉(zhuǎn)動角度和第四轉(zhuǎn)動角度,第四轉(zhuǎn)動角度為第三轉(zhuǎn)動角度之后的車輛的前輪轉(zhuǎn)動角度。處理模塊,用于若避障模式為第二模式,則基于車輛的預(yù)設(shè)速度、安全距離、以及前輪的第三轉(zhuǎn)動角度,確定前輪偏移量,前輪偏移量用于指示在單位時間內(nèi)前輪轉(zhuǎn)動角度的變化量。處理模塊,還用于基于第三轉(zhuǎn)動角度和前輪偏移量,確定第四轉(zhuǎn)動角度。處理模塊,還用于基于多個前輪轉(zhuǎn)動角度和預(yù)設(shè)傳動比,確定多個后輪轉(zhuǎn)動角度。
17、在一種可能的實施方式中,處理模塊,用于基于預(yù)設(shè)速度和安全距離,確定目標(biāo)移動時長。處理模塊,還用于基于目標(biāo)移動時長和第三轉(zhuǎn)動角度,確定前輪偏移量。
18、根據(jù)本技術(shù)提供的第三方面,提供一種車輛,包括:處理器;用于存儲處理器可執(zhí)行指令的存儲器;其中,處理器被配置為執(zhí)行指令,以實現(xiàn)上述第一方面及其任一種可能的實施方式的方法。
19、根據(jù)本技術(shù)提供的第四方面,提供一種計算機(jī)可讀存儲介質(zhì),當(dāng)計算機(jī)可讀存儲介質(zhì)中的指令由車輛的處理器執(zhí)行時,使得車輛能夠執(zhí)行上述第一方面中及其任一種可能的實施方式的方法。
20、根據(jù)本技術(shù)提供的第五方面,提供一種計算機(jī)程序產(chǎn)品,計算機(jī)程序產(chǎn)品包括計算機(jī)指令,當(dāng)計算機(jī)指令在車輛上運行時,使得電子設(shè)備執(zhí)行上述第一方面中及其任一種可能的實施方式的方法。
21、由此,本技術(shù)的上述技術(shù)特征具有以下有益效果:
22、(1)可以獲取車輛與被撞障礙物之間的位置關(guān)系,以及車輛與臨近障礙物之間的安全距離。之后,基于位置關(guān)系,確定避障模式,從而確定前輪和后輪的轉(zhuǎn)動方向。如此,能夠使得車輛減少輪胎損耗的同時,避免車輛后方與被撞障礙物發(fā)生碰撞。之后,基于位置關(guān)系和安全距離,確定后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度。這樣一來,能夠使得車輛更精確地遠(yuǎn)離被撞障礙物,提高避障成功的概率。之后,基于避障模式、安全距離、后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度,確定避障路徑,避障路徑為車輛按照后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度進(jìn)行蟹行移動的路徑。如此,能夠?qū)τ诓煌膱鼍埃_定對應(yīng)場景下的避障模式,得到更合適的避障路徑。進(jìn)一步地,通過后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度對車輛進(jìn)行控制,可以顯著減小車輛的轉(zhuǎn)彎半徑,迅速調(diào)整車輛的行駛方向,在遠(yuǎn)離被撞障礙物的同時,避免車輛對被撞障礙物的二次碰撞。
23、(2)當(dāng)障礙物在車輛的側(cè)后方時,前輪和后輪的轉(zhuǎn)動方向相同或者相反均可以使得車輛遠(yuǎn)離被撞障礙物,車輛后方避免與被撞障礙物發(fā)生二次碰撞。當(dāng)障礙物在車輛的側(cè)前方時,前輪和后輪的轉(zhuǎn)動方向相同,可以使得車輛遠(yuǎn)離被撞障礙物的同時,車輛后方避免與被撞障礙物發(fā)生二次碰撞。
24、(3)通過后輪初始轉(zhuǎn)動角度和預(yù)設(shè)傳動比、精確計算前輪初始轉(zhuǎn)動角度,可以確保車輛在轉(zhuǎn)彎時各車輪的轉(zhuǎn)角關(guān)系符合阿克曼轉(zhuǎn)向定理,使每個車輪均繞同一交點純滾動,減少輪胎磨損,提高轉(zhuǎn)彎時的平穩(wěn)性和舒適性。
25、(4)避障模式為第一模式的情況下,通過目標(biāo)移動時長和第一轉(zhuǎn)動角度得到后輪偏移量,可以使得車輛在完成避障路徑的時候,使得車輛可以在避障時的路徑更加精確,減少因轉(zhuǎn)向不足或過度導(dǎo)致的偏差。通過第一轉(zhuǎn)動角度和后輪偏移量來得到第二轉(zhuǎn)動角度,并基于多個后輪轉(zhuǎn)動角度和預(yù)設(shè)傳動比,確定多個前輪轉(zhuǎn)動角度。可以不斷減小后輪轉(zhuǎn)動角度,使車輛的轉(zhuǎn)向動作更加平滑,減少突兀的轉(zhuǎn)向感,使得乘坐體驗更加平穩(wěn)。
26、(5)避障模式為第二模式的情況下,可以通過目標(biāo)移動時長和第三轉(zhuǎn)動角度得到后輪偏移量,使得車輛在完成避障路徑的時候,使得車輛可以在避障時后輪的路徑更加精確。通過第三轉(zhuǎn)動角度和后輪偏移量來得到第四轉(zhuǎn)動角度,并基于多個前輪轉(zhuǎn)動角度和預(yù)設(shè)傳動比,確定多個后輪轉(zhuǎn)動角度。可以減少車輛的側(cè)滑傾向,提高低速行駛的穩(wěn)定性。
27、(6)可以基于避障模式、安全距離、后輪初始轉(zhuǎn)動角度和前輪初始轉(zhuǎn)動角度,確定在避障路徑中多個前輪轉(zhuǎn)動角度和多個后輪轉(zhuǎn)動角度,一個前輪轉(zhuǎn)動角度對應(yīng)一個后輪轉(zhuǎn)動角度。之后,按照多個前輪轉(zhuǎn)動角度和多個后輪轉(zhuǎn)動角度,確定避障路徑。這樣一來,通過不斷調(diào)整后輪轉(zhuǎn)動角度,使得車輛能夠更精確地控制行駛路徑,在復(fù)雜的場景下可以靈活調(diào)整行駛軌跡。進(jìn)一步地,可以使得車輛依照避障路徑快速遠(yuǎn)離被撞障礙物,減少避障時間。
28、需要說明的是,第二方面至第四方面中的任一種實現(xiàn)方式所帶來的技術(shù)效果可參見第一方面中對應(yīng)實現(xiàn)方式所帶來的技術(shù)效果,此處不再贅述。
29、應(yīng)當(dāng)理解的是,以上的一般描述和后文的細(xì)節(jié)描述僅是示例性和解釋性的,并不能限制本技術(shù)。
- 還沒有人留言評論。精彩留言會獲得點贊!