一種可識別鐵路軌道裝置巡檢機器人的制作方法
本發明涉及鐵路檢查車,具體涉及一種可識別鐵路軌道裝置巡檢機器人。
背景技術:
1、鐵路軌道裝置一般包括道床、軌枕、鋼軌、聯結零件、道岔和防爬設備等,其是鐵路運輸業的基礎設備,因其常年裸露在大自然中,經受著風雨凍融和列車荷載的作用,鋼軌幾何尺寸會不斷變化,路基及道床不斷產生變形,鋼軌、聯結零件及軌枕會不斷磨損,致使鐵路運輸企業需要及時對該類變化進行巡檢監控,以發現和處理潛在的安全隱患和問題,保障列車運行的安全,由此需要使用到相應的巡檢設備。
2、公開號為cn118405166b的專利說明書中公開了一種多功能鐵路巡檢機器人,包括車體、設置于車體的接觸線檢測傳感器和支柱限界檢測傳感器,車體設置有與軌頭頂面配合的行走機構以及與軌頭兩側側面配合的導向組件;導向組件包括第一滾輪支架和第二滾輪支架;第一滾輪支架和第二滾輪支架轉動設置于車體的底部,并與旋轉驅動機構傳動連接,旋轉驅動機構設置于車體;
3、該種鐵路巡檢機器人通過將機器人放置在鋼軌上,并通過驅動電機控制滾輪支架上的滾輪夾持鋼軌,使其巡檢時沿鋼軌表面進行移動,以此完成對鋼軌的移動巡檢,該種技術方案存在的不足之處在于,該種巡檢方式僅可在鋼軌處于未啟用狀態下進行,但鐵路軌道的巡檢為周期性的常規檢查,在鐵路軌道使用的各階段均存在巡檢要求,即該種巡檢機器人無法脫離鋼軌進行巡檢。
技術實現思路
1、本發明的目的在于提供一種可識別鐵路軌道裝置巡檢機器人,所要解決的技術問題如下:現有的鐵路軌道巡檢機器人在巡檢過程中依托鋼軌移動,無法脫離鋼軌進行巡檢。
2、本發明的目的可以通過以下技術方案實現:
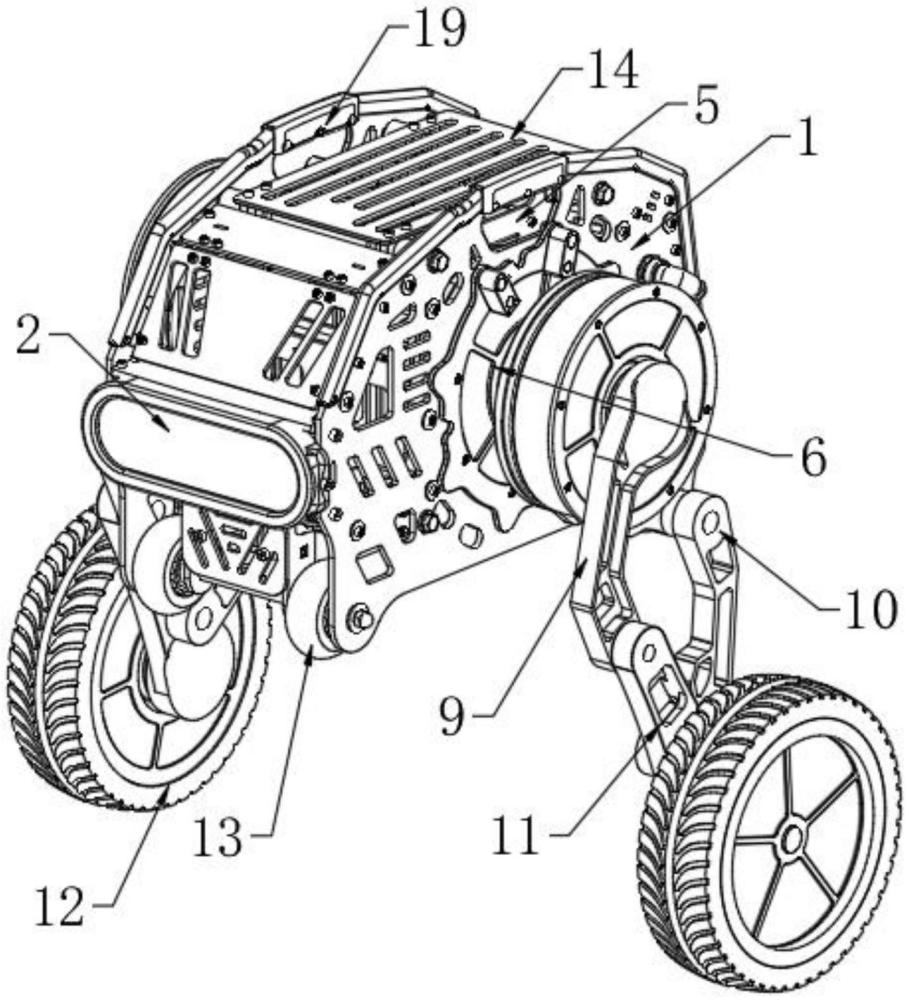
3、一種可識別鐵路軌道裝置巡檢機器人,包括機身,所述機身一側設置有傳感探測件,且另一側設置有啟停開關,所述機身內部安裝有主控板,所述機身頂部安裝有電池模組,且兩側均開設有輪孔,所述輪孔于所述機身內側安裝有擺動驅動電機,所述擺動驅動電機外側安裝有伸縮驅動電機,所述伸縮驅動電機外側中心處安裝有主驅動桿,且側邊安裝有副驅動桿,所述主驅動桿和所述副驅動桿底端之間安裝有輪桿,所述輪桿外側安裝有驅動輪,所述機身底部安裝有多個支撐輪。
4、作為本發明進一步的方案:所述傳感探測件、擺動驅動電機和所述伸縮驅動電機均與所述主控板電性連接。
5、作為本發明進一步的方案:所述主控板至少包括有運動控制模塊、數據傳輸模塊和應用控制模塊。
6、作為本發明進一步的方案:所述機身頂端安裝有負載板,所述負載板均勻設置有多個條孔,所述機身頂端兩側均設置有提手。
7、作為本發明進一步的方案:所述機身一側設置有電量顯示屏,所述電量顯示屏與所述電池模組電性連接,所述機身一側底部設置有充電孔。
8、作為本發明進一步的方案:所述驅動輪與所述支撐輪底面齊平,所述主驅動桿頂端與所述負載板平行。
9、作為本發明進一步的方案:所述副驅動桿一側為豎直狀,所述支撐輪高于所述驅動輪。
10、作為本發明進一步的方案:兩個所述驅動輪均內置有獨立運行的輪轂電機,所述擺動驅動電機用于控制所述機身的俯仰角度。
11、本發明的有益效果:
12、1、本發明中,通過在機身內安裝主控板和電池模組,在機身兩側安裝與主控板連接的伸縮驅動電機,并在伸縮驅動電機外側中心以及側邊之間安裝由主驅動桿、副驅動桿、輪桿組成的四連桿機構,并在該機構側邊安裝了驅動輪,主控板在控制伸縮驅動電機轉動時,主驅動桿隨之變化的轉動方向更改了機身的離地高度,使機器人具備匍匐、蹲立和直立三種狀態,且具備跳躍式的越障功能,即機器人在巡檢過程中可脫離對鋼軌的附著,獨立在鋼軌臨近位置的各地形處進行移動巡檢,其目的在于,使巡檢機器人具備在鋼軌使用周期內任意時間段任意位置處的獨立巡檢能力,避免巡檢過程對火車正常使用軌道的影響。
13、2、本發明中,在機身一側安裝了與主控板連接的傳感探測件,并在機身內部安裝了與伸縮驅動電機連接的擺動驅動電機,同時在兩側驅動輪內安裝了獨立的輪轂電機,其中擺動驅動電機用于控制機身的俯仰角度,兩個獨立運行的輪轂電機可通過同向轉動驅動輪使機器人具備水平向角度轉動的功能,則俯仰角度和運動轉向功能的配合,使機器人具備了沿鋼軌鋪設方向和延伸俯仰角度運動巡檢的能力;
14、機器人在具備脫離鋼軌于各地形進行移動能力的基礎上,配合水平轉向和豎向觀測角度的調整,使其具備了對鋼軌的持續獨立巡檢能力。
技術特征:
1.一種可識別鐵路軌道裝置巡檢機器人,包括機身(1),其特征在于,所述機身(1)一側設置有傳感探測件(2),且另一側設置有啟停開關(3),所述機身(1)內部安裝有主控板(4),所述機身(1)頂部安裝有電池模組(5),且兩側均開設有輪孔(6),所述輪孔(6)于所述機身(1)內側安裝有擺動驅動電機(7),所述擺動驅動電機(7)外側安裝有伸縮驅動電機(8),所述伸縮驅動電機(8)外側中心處安裝有主驅動桿(9),且側邊安裝有副驅動桿(10),所述主驅動桿(9)和所述副驅動桿(10)底端之間安裝有輪桿(11),所述輪桿(11)外側安裝有驅動輪(12),所述機身(1)底部安裝有多個支撐輪(13)。
2.根據權利要求1所述的一種可識別鐵路軌道裝置巡檢機器人,其特征在于,所述傳感探測件(2)、擺動驅動電機(7)和所述伸縮驅動電機(8)均與所述主控板(4)電性連接。
3.根據權利要求1所述的一種可識別鐵路軌道裝置巡檢機器人,其特征在于,所述主控板(4)至少包括有運動控制模塊、數據傳輸模塊和應用控制模塊。
4.根據權利要求1所述的一種可識別鐵路軌道裝置巡檢機器人,其特征在于,所述機身(1)頂端安裝有負載板(14),所述負載板(14)均勻設置有多個條孔(15),所述機身(1)頂端兩側均設置有提手(19)。
5.根據權利要求1所述的一種可識別鐵路軌道裝置巡檢機器人,其特征在于,所述機身(1)一側設置有電量顯示屏(16),所述電量顯示屏(16)與所述電池模組(5)電性連接,所述機身(1)一側底部設置有充電孔(17)。
6.根據權利要求4所述的一種可識別鐵路軌道裝置巡檢機器人,其特征在于,所述驅動輪(12)與所述支撐輪(13)底面齊平,所述主驅動桿(9)頂端與所述負載板(14)平行。
7.根據權利要求1所述的一種可識別鐵路軌道裝置巡檢機器人,其特征在于,所述副驅動桿(10)一側為豎直狀,所述支撐輪(13)高于所述驅動輪(12)。
8.根據權利要求1所述的一種可識別鐵路軌道裝置巡檢機器人,其特征在于,兩個所述驅動輪(12)均內置有獨立運行的輪轂電機(18),所述擺動驅動電機(7)用于控制所述機身(1)的俯仰角度。
技術總結
本發明公開了一種可識別鐵路軌道裝置巡檢機器人,涉及鐵路檢查車技術領域。本發明包括機身,機身一側設置有傳感探測件,且另一側設置有啟停開關,機身內部安裝有主控板,機身頂部安裝有電池模組,且兩側均開設有輪孔,輪孔于機身內側安裝有擺動驅動電機,擺動驅動電機外側安裝有伸縮驅動電機,伸縮驅動電機外側中心處安裝有主驅動桿,且側邊安裝有副驅動桿,主驅動桿和副驅動桿底端之間安裝有輪桿,輪桿外側安裝有驅動輪,機身底部安裝有多個支撐輪。本發明通過在機器人兩側設置與四連桿連接的帶有獨立輪轂電機的驅動輪,使其具備了對鋼軌的持續獨立巡檢能力。
技術研發人員:和子豪,和西榮
受保護的技術使用者:內蒙古西發智能科技有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!