足式機器人的腿足結構及足式機器人的制作方法
本申請涉及機器人,尤其涉及一種足式機器人的腿足結構及足式機器人。
背景技術:
1、在機器人技術中,點足機器的足結構采用一個大致水滴狀的結構來作為與地面接觸的部分,其通過螺釘與小腿進行緊固連接。其包括兩個部分,其一是與小腿連接的連接結構件,其二是包裹連接結構件的包裹件。這樣的足結構其結構簡單,裝配方便,使用方便。雖然,現有的點足機器的足結構雖然結構簡單,裝配方便,使用方便。但是,由于其通過螺釘與小腿剛連接,機器人在行走的過程中,與地面接觸后力通過足與小腿的剛性連接直接傳遞至小腿上,進而向上傳遞至整個機器人整體,這就造成了整個機器人的腿整體是剛性的,所受到的力直接作用整個機器人,容易造成機器人整體的強烈震動,從而造成連接松,甚至部件損壞。
技術實現思路
1、為解決或部分解決現有技術中的不足,本申請提供一種足式機器人的腿足結構,包括:
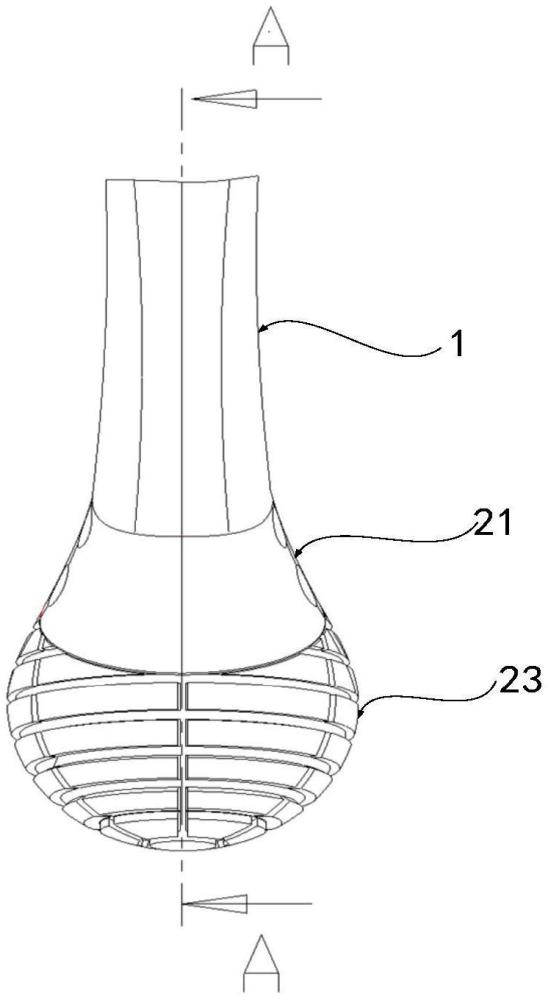
2、小腿,限定小腿兩端為一直線的兩個端點,定義直線為小腿中心線;
3、足,足包括連接端與構造有容置腔的球端;及彈性件,限定彈性件大致的幾何中心點在其高度方向上的延伸線為彈性件中心線;
4、其中,連接端與小腿的末端連接,彈性件設置于容置腔內,小腿中心線與彈性件中心線具有一夾角。
5、在一個可選方案中,還包括:
6、足套,足套大致構造成具有腔體及一開口的球形,足套的外側構造有防滑紋路;
7、足套套設于球端,且包覆彈性件。
8、在一個可選方案中,夾角大于或等于15度,且小于75度。
9、在一個可選方案中,夾角大于或等于30度,且小于60度。
10、在一個可選方案中,彈性件大致呈圓柱狀,構造有依次層疊設置的第一緩沖部、第二緩沖部與第三緩沖部;
11、第一緩沖部具有一大致呈圓弧形的面;
12、第二緩沖部包括支撐部和虧縮部,支撐部與虧縮部均大致呈圓盤型,支撐部外延大致平齊,支撐部外延向內;
13、第三緩沖部包括定位凸臺、環狀凹陷、虧縮支撐部,環狀凹陷構造于第三緩沖部的中部,虧縮支撐部構造于環狀凹陷之內,定位凸臺圍繞環狀凹陷設置若干個。
14、在一個可選方案中,連接端構造有連接腔,連接端的側壁上構造有第一連接孔連通連接腔,小腿構造有第二連接孔,小腿插設于連接腔內,并通過緊固件穿過第一連接孔后,與第二連接孔固定連接。
15、在一個可選方案中,連接端與球端的連接處構造有第一定位臺,足套的上部構造有第二定位臺,第二定位臺與第一定位臺抵接,球端的容置腔處構造有第三定位臺,足套內構造有第四定位臺,第三定位臺與第四定位臺抵接。
16、在一個可選方案中,足套內構造有防滑筋,球端上構造有防滑槽,防滑筋嵌設于防滑槽內以定位足套;或足套內構造有防滑槽,球端上構造有防滑筋,防滑筋嵌設于防滑槽內以定位足套。
17、在一個可選方案中,容置腔的底部構造有若干個定位腔,若干個定位凸臺分別過盈配合地嵌設于若干個定位腔之內。
18、在一個可選方案中,一種足式機器人,包括:上述任一方案中的足式機器人的腿足結構。
19、本申請提供的技術方案可以包括以下有益效果:
20、本申請通過將一個彈性件設置在連接端的容置腔內,在運動的時候使彈性件位于觸地點,同時使得彈性件的中心線與小腿中心線形成夾角α。在機器人行走的過程中,力通過彈性件向小腿傳遞的時候,依靠彈性件的彈性特性而使腿足結構在受力的時候具備緩沖的作用,從而避免整個腿與足結構聯合為一個剛性件,避免力直接傳遞至整個機器人。依靠彈性件的彈性緩沖降低整個機器人行走時的震動強力度,避免造成機器人整體的強烈震動,從而減低造成機器人連接松,甚至部件損壞的風險。而且,由于述彈性件在與連接端連接后使得彈性件的中心線與小腿中心線形成夾角α,腿足結構在承受機器人的整體重力行走觸地的時候,其承受的反沖力不直接作用到小腿的中心線上,使得緩沖效果更好。
21、應當理解的是,以上的一般描述和后文的細節描述僅是示例性和解釋性的,并不能限制本申請。
技術特征:
1.一種足式機器人的腿足結構,其特征在于,包括:
2.根據權利要求1所述的足式機器人的腿足結構,其特征在于,還包括:
3.根據權利要求1所述的足式機器人的腿足結構,其特征在于:
4.根據權利要求1所述的足式機器人的腿足結構,其特征在于:
5.根據權利要求1所述的足式機器人的腿足結構,其特征在于:
6.根據權利要求1所述的足式機器人的腿足結構,其特征在于:
7.根據權利要求2所述的足式機器人的腿足結構,其特征在于:
8.根據權利要求2所述的足式機器人的腿足結構,其特征在于:
9.根據權利要求5所述的足式機器人的腿足結構,其特征在于:
10.足式機器人,其特征在于,包括:
技術總結
本申請是關于一種足式機器人的腿足結構及足式機器人,包括:小腿和足,限定小腿兩端為一直線的兩個端點,定義直線為小腿中心線;足包括連接端與構造有容置腔的球端;及彈性件,限定彈性件大致的幾何中心點在其高度方向上的延伸線為彈性件中心線;其中,連接端與小腿的末端連接,彈性件設置于容置腔內,小腿中心線與彈性件中心線具有一夾角;本裝置避免整個腿與足結構聯合為一個剛性件,避免力直接傳遞至整個機器人,依靠彈性件的彈性緩沖降低整個機器人行走時的震動強力度,避免造成機器人整體的強烈震動,從而減低造成機器人連接松,甚至部件損壞的風險。
技術研發人員:陳健,劉相晨
受保護的技術使用者:深圳逐際動力科技有限公司
技術研發日:20240820
技術公布日:2025/3/20
- 還沒有人留言評論。精彩留言會獲得點贊!